停车后最怕什么?除了罚单,大概就是回来发现爱车被莫名剐蹭。不过,福特汽车最新曝光的一项创新专利,或许能让您的爱车在无人状态下自己“聪明”地避开这类意外损伤。
据汽车媒体Drive.Au报道,福特在2024年向美国专利商标局提交了一项极具前瞻性的专利申请:让车辆在停放且无人看管时,具备自主移动能力,以主动规避潜在的碰撞或剐蹭风险。这项专利的详细技术说明已于本月正式公开。
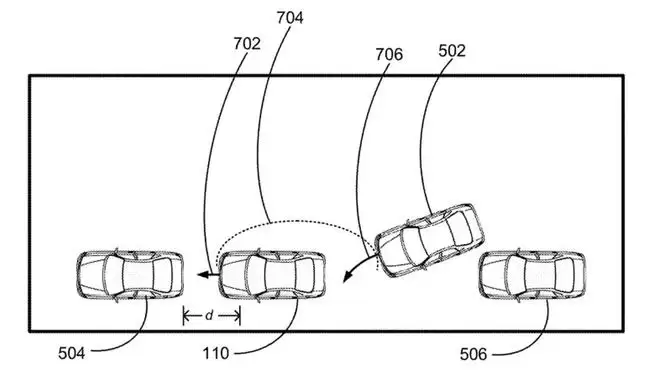
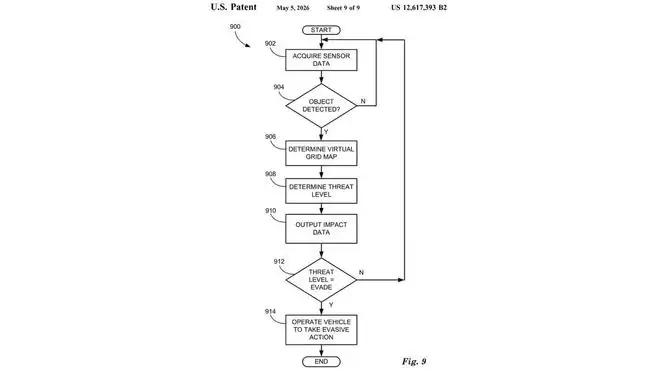
该系统的核心在于一套高度集成的环境感知与智能决策机制。车辆通过遍布周身的多种传感器(如雷达、摄像头)持续扫描周围环境,实时监测动态目标——无论是正在倒车的车辆、穿梭的行人还是路过的电动自行车。系统会精准分析这些目标的运动速度与轨迹,预测其行进路径,并评估它们与静止车辆发生碰撞的概率及危险等级。
关键在于后续的“自主避险”动作。当系统判定一次较高风险的碰撞即将发生,且移动条件安全可行时,它会自动控制车辆进行小幅度的位置调整,例如向前或向后挪动几十厘米,从而巧妙地让开撞击点,实现主动避让。
当然,整个避险过程遵循明确的警示优先原则。在检测到潜在风险初期,车辆会首先通过鸣笛、闪烁车灯等方式发出声光警报,试图提醒接近方注意。若警告无效,碰撞风险持续升高,系统将自动激活全车摄像头,完整记录事件全过程,为可能发生的事故责任认定留存清晰、关键的影像证据。
从技术可行性来看,实现此类功能的基础硬件已日趋成熟。例如,以特斯拉为代表的车企,其车辆搭载的“哨兵模式”与全自动驾驶(FSD)硬件系统,在环境感知和车辆控制方面已具备相当潜力。福特的这项专利,可被视为对现有智能驾驶硬件在特定泊车场景下的创新性功能拓展与应用探索。
然而,愿景虽好,实际落地仍面临显著挑战。最主要的障碍并非来自技术层面,而是复杂的法律、法规与责任界定问题。允许一辆无人驾驶的汽车在公共区域自主移动,即便初衷是避让,也涉及道路交通安全法规、公共安全责任以及事故责任归属等一系列待厘清的难题。因此,这项技术能否最终从专利文件走向量产车型,目前仍存在诸多不确定性。




