CVPR 2026 3D视觉前沿:模型如何理解、生成与构建三维世界
从看懂 3D 到生成 4D
让机器真正理解三维空间,而非仅仅模仿二维图像的表面纹理,始终是3D视觉领域面临的核心挑战。其本质在于,如何引导模型超越对图像外观相似性的依赖,深入掌握深层的三维空间结构。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
近期,来自卡内基梅隆大学、Adobe研究院与哈佛大学的联合研究《E-RayZer: Self-supervised 3D Reconstruction as Spatial Visual Pre-training》,精准地瞄准了这一关键问题。他们探索了一种可能性:在不依赖任何3D标注、相机位姿或深度监督信号的情况下,仅凭同一场景的多视角图像,能否让模型自主学会理解空间几何?
答案是肯定的。他们提出的E-RayZer方法,本质上是一个自监督的3D视觉预训练框架。模型接收多张同一场景的图片后,会自主完成一系列推理:首先估计相机参数,接着利用显式的3D高斯分布来构建场景的隐式表示,然后通过可微渲染技术生成目标视角的图像。最终,渲染结果与真实图像之间的差异,便成为驱动模型优化的核心信号。这一完整流程迫使模型必须理解相机运动、三维几何关系以及多视角一致性,从而实现了真正的空间认知能力,而非停留在浅层的图像匹配层面。
不只拼生成,底层表征也在进化
当然,3D视觉的进步并不仅仅体现在“生成一个完整模型”的最终结果上。许多基础性研究工作,更关注模型能否习得可靠、稳定的底层空间表征,为后续各类3D任务(如三维重建、SLAM、新视角合成)奠定坚实的基础。
武汉大学计算机学院与小米EV团队的合作研究《From Pairs to Sequences: Track-Aware Policy Gradients for Keypoint Detection》,便聚焦于一个经典但至关重要的基础问题:3D视觉系统中的关键点检测。尤其是在运动恢复结构(SfM)、同步定位与地图构建(SLAM)等任务中,关键点能否在连续视频帧中保持稳定、具备长期可追踪性,直接决定了整个系统的鲁棒性与精度。
现有方法大多基于图像对进行训练,优化的是两张静态图像之间的匹配性能。然而,在真实的动态视频序列中,挑战远不止于此——剧烈的视角变化、复杂的光照波动、严重的运动模糊都会对关键点的稳定性造成持续冲击。这篇论文提出的TraqPoint方法,其核心思路颇具启发性:它将关键点检测视为一个序列决策问题,并引入强化学习中的策略梯度方法,直接优化关键点在长时间跨度上的可追踪性。这意味着,模型的学习目标从“匹配好当前这一对”升级为“在整个视频序列中都保持稳定可靠”。
从论文到代码,从采集到数据
任何前沿领域的技术突破,都离不开算法创新与工程基建的双轮驱动。对于3D视觉而言,一方面,我们需要更高效的工具将前沿论文快速转化为可运行的代码;另一方面,真实世界任务的推进,也亟需更高质量、更可控的数据资源作为支撑。
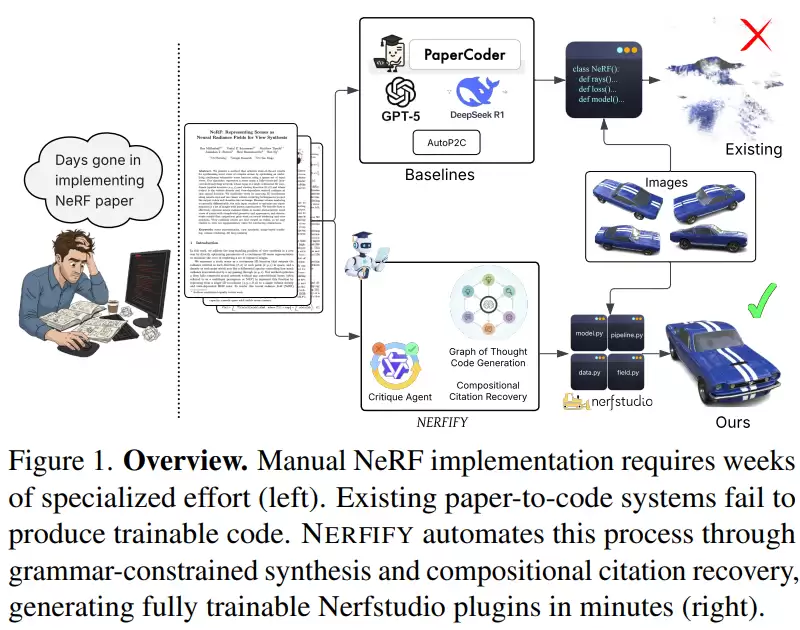
加州大学圣地亚哥分校(UCSD)提出的《NERFIFY: Multi Agent Framework for Turning NeRF Papers into code》,直击了第一个痛点。其核心目标是利用大语言模型智能体,自动将神经辐射场(NeRF)相关的研究论文,转化成能够直接嵌入Nerfstudio框架并训练运行的插件代码。
这并非天方夜谭。研究者们发现,许多NeRF论文并未开源代码,导致复现成本极高。而通用的“论文转代码”工具在面对NeRF这类复杂的视觉任务时,生成的代码往往无法运行或效果不佳。NERFIFY的巧妙之处在于,它设计了一套面向NeRF领域的自动化流水线,将论文解析、依赖恢复、代码生成和训练反馈串联起来。
具体而言,系统首先将论文内容进行结构化解析,并利用Nerfstudio的架构约束形成代码生成规则,确保生成的代码符合基本的模块接口规范。接着,通过“思维图”驱动的多智能体协作,按依赖顺序生成多个代码文件,甚至能自动追踪论文引用中隐藏的关键组件(如特定的采样器、位置编码器)。最后,系统还会根据初步训练后的渲染结果进行视觉质量评估,并自动修正代码中的问题。

因此,它不再是简单地“读论文、写代码”,而是深度融合了领域知识、结构约束和视觉反馈的智能系统。实验表明,在30篇不同复杂度的NeRF论文上,NERFIFY对于无开源代码的论文,其生成结果在视觉质量上已接近专家手写代码的水平,同时将实现周期从数周压缩到了几分钟。这项工作的核心价值,在于显著降低了NeRF研究的复现与二次开发门槛。
如果说NERFIFY试图在工具链上提升效率,那么OLATverse则是在数据基建层面填补关键空白。由马克斯・普朗克信息学研究所和南京大学共同发布的《OLATverse: A Large-scale Real-world Object Dataset with Precise Lighting Control》,旨在为逆渲染、重光照、新视角合成等高级视觉任务提供高质量的数据支撑。
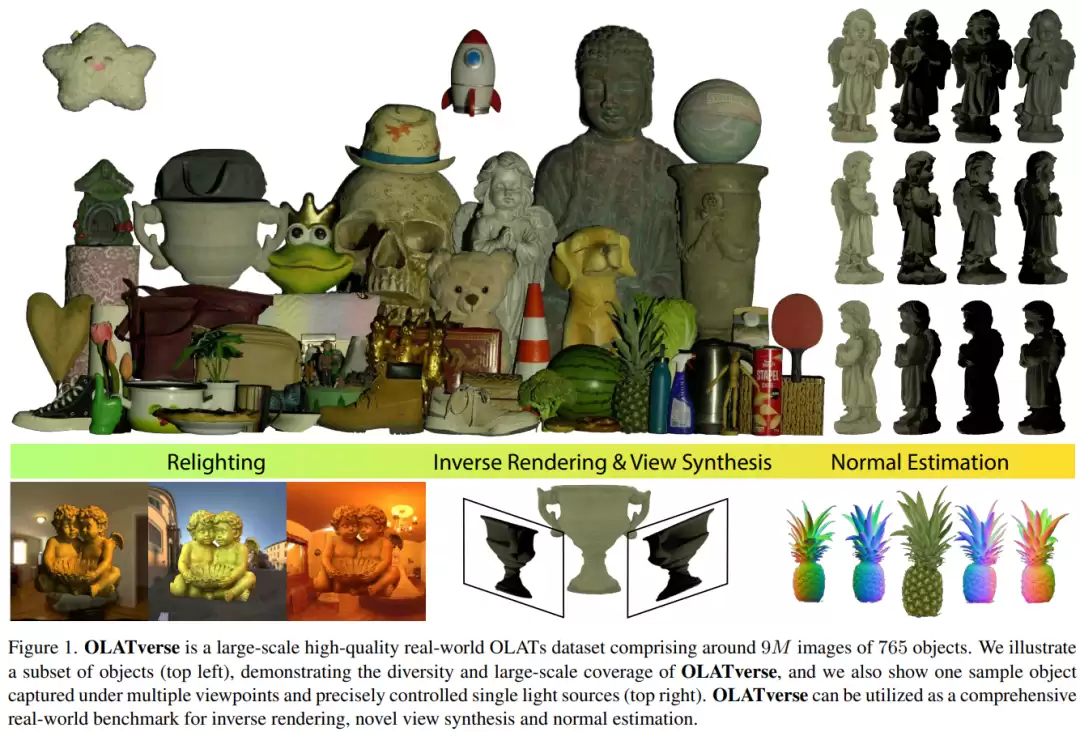
当前,许多先进方法仍严重依赖合成数据训练,或在有限的小规模真实数据上评估,这导致模型在真实场景的材质、光照泛化能力存在明显瓶颈。OLATverse的推出,正是为了破解这一困境。它是一个包含765个真实物体的大规模数据集,其核心优势在于将“大规模物体数量”与“高精度可控光照”完美结合。
数据采集在一个专业的光照舞台(lightstage)中进行,每个物体由35个经过校准的相机环绕拍摄,并受到331个独立可控光源的照射,支持OLAT(单光源)、环境光等多种精确的光照设置。与此同时,数据集还提供了相机参数、物体掩码、表面法线及漫反射反照率等丰富的辅助标注。
以往的数据集往往在“物体数量”和“光照精度”之间难以兼顾,而OLATverse成功地将二者统一。它为模型学习材质、几何与光照之间的复杂解耦关系,提供了一个更贴近真实世界的高质量资源。这不仅可用于训练更鲁棒的重光照和生成先验模型,也可作为逆渲染、法线估计等任务的综合基准测试平台。
当然,论文也坦诚指出,目前数据中的法线和反照率并非严格意义上的绝对物理真值,且未提供物体网格。但无论如何,作为一个兼具规模与精度的真实物体外观数据集,OLATverse无疑为未来的3D视觉与图形学研究提供了极具价值的底层数据燃料。
相关攻略

3D视觉研究正致力于让模型超越二维图像模仿,真正理解三维空间结构。E-RayZer框架仅凭多视角图像即可自监督学习空间认知。关键点检测研究通过强化学习优化长期追踪稳定性。工具NERFIFY能自动将论文转化为可运行代码,大幅降低复现门槛。数据集OLATverse则提供了大规模、光照可控的真实物体数据,助力模型。

视觉世界模型 “VideoWorld 2” 由豆包大模型团队与北京交通大学联合提出。不同于 Sora 2 、Veo 3、Wan 2 2 等主流多模态模型,VideoWorld 系列工作在业界首次实现

新智元报道编辑:LRST【新智元导读】CVPR新研究MoDES让多模态大模型推理效率飙升:无需训练,智能跳过88%冗余专家,仍保留97%性能,彻底打破「跳得多必掉点」旧认知,推理速度提升2倍。多模态

新智元报道编辑:艾伦 Aeneas【新智元导读】CVPR 2026放榜了!本届共有16092篇投稿,最终4090篇被Accept,录用率25 42%。论文被录用的作者们,已经纷纷晒出喜讯了。计算机视

2025 年,AI 依然在加速奔跑。从多模态大模型到智能体系统的演进,从基础理论的突破到产业应用的深化,技术的每一次跃迁,都在重塑未来的轮廓。在海量学术成果爆发的背景下,单纯的阅读已难以追赶技术的迭
热门专题







热门推荐

5月12日,马来西亚吉隆坡成功举办了一场具有前瞻性的行业盛会——中国-马来西亚电动汽车、电池技术与新能源人才创新发展论坛。来自两国政府部门、领军企业、顶尖高校及国际组织的代表共聚一堂,深入交流了在未来产业协同、清洁能源技术创新及高端人才培养等核心领域的合作路径与机遇。 马来西亚第一副总理兼乡村及区域

具身智能要迈过的第一道硬门槛,从来都是量产。 过去几年,全球人形机器人行业反复印证了这一点:舞台演示可以很快,工程验证可以很快,视频传播也可以很快。但当一台机器人要从实验室走向产线,再走向客户现场,问题的复杂度会呈指数级上升。 特斯拉的Optimus就是一个典型的参照系。马斯克多次表达过对Optim

向朋友问路时,如果对方清楚路线,通常会立刻回答“直走然后左转”。但如果对方并不确定,往往会先停顿一下,犹豫地说“呃……好像是……往那边?”。这个开口前的短暂迟疑,往往比最终给出的答案更能说明问题——对方是否真的知道答案。 近期,美国天普大学计算机与信息科学系的一项研究,正是捕捉到了AI回答问题时类似

这项由浙江大学、华南理工大学、南京大学和北京大学联合开展的前沿研究,于2026年4月正式发布,其论文预印本编号为arXiv:2604 24575。 图像分割技术听起来或许有些专业,但它早已深度融入我们的日常生活。无论是智能手机拍摄的背景虚化人像、AI系统在CT影像中精准勾勒病灶轮廓,还是自动驾驶汽车

“大唐”预售热潮尚未平息,“大汉”已蓄势待发,比亚迪王朝系列正以前所未有的攻势,叩响高端市场的大门。 在北京车展引发轰动的比亚迪大唐,预售订单已迅速突破10万台大关,彰显了市场对比亚迪高端产品的强烈期待。而最新信息显示,汉家族即将迎来一位重磅新成员——“大汉”,这款定位D级旗舰的轿车,目标直指20-