前些天,我到复旦大学校园逛了一圈,在元·创中心406室的自主集群系统实验室里,偶遇一场别开生面的“比赛”。赛道上奔驰的不是真实车辆,而是一辆巴掌大小的模型车;而真正的“赛车手”,则是学生们亲手训练出的AI自动驾驶模型。
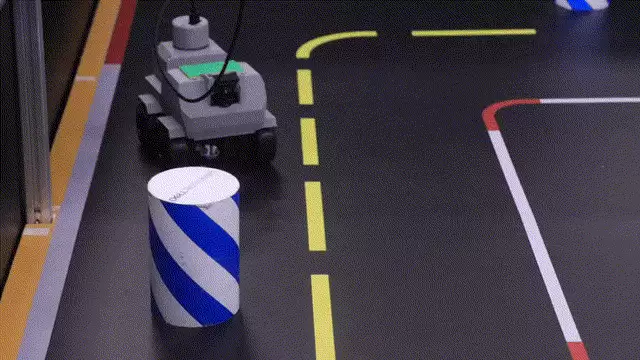
小车沿着车道稳稳前行,前方忽然出现一个蓝白条纹的障碍物。你猜怎么着?小车略微停顿,迅速向左变道,从外侧绕过,继续平稳行驶。紧盯着沙盘的,是未来信息创新学院23级的本科生杨瑞麒。为了这场验收考核,他前前后后花了十几个小时,精心训练控制小车的AI模型。
“全程无碰撞,接管率仅为3%。”比赛结束后,杨瑞麒长舒一口气。他的小车凭借近乎完美的避障表现,拿下了相当不错的成绩。
从虚拟到现实
搭建自动驾驶训练场
这门课程全称是“自动驾驶人工智能原理与实践”,属于复旦AI大课体系中的AI-T类别,专注于垂直领域应用,面向全校本科生和研究生开放选课。
授课教师未来信息创新学院教授胡波(左)与集成电路与微纳电子创新学院副教授林青(右)
课程负责人胡波教授介绍,这门课最早可追溯到2019年的校企合作项目。当时使用的是自带车端算力的定制小车,前置门槛较高,对初学者不太友好。团队持续改进,将计算任务迁移到边缘侧,由电脑完成主要AI功能,小车只负责执行。这样一来,入门门槛大幅降低,连嵌入式编程都不需要学习,全校不同专业的学生都能轻松参与。
课程内容覆盖了自动驾驶开发的完整流程:从车辆准备、道路数据采集、数据集预处理,到模型编写、训练、部署,再到路测验证。学生既要在线上仿真平台上跑通算法,也要在线下沙盘里用实体小车完成效果验证。
离开406实验室,同学们还有一间“线上教室”——“自动驾驶虚拟仿真实验”平台。
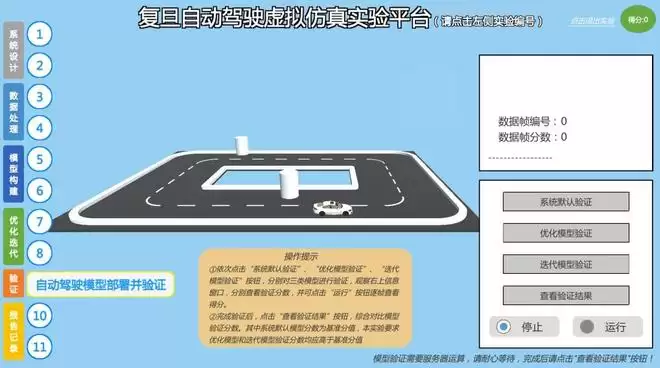
线上虚仿实验平台包含10个实验步骤和1个日志记录回顾环节
这个平台是课程的半壁江山,衍生的实验课于去年9月入选教育部第三批国家级虚拟仿真实验教学一流课程。虚拟仿真平台的累计访问量已接近20万,修读学生超过1500人,全国已有85所高校利用该平台上过实验课。

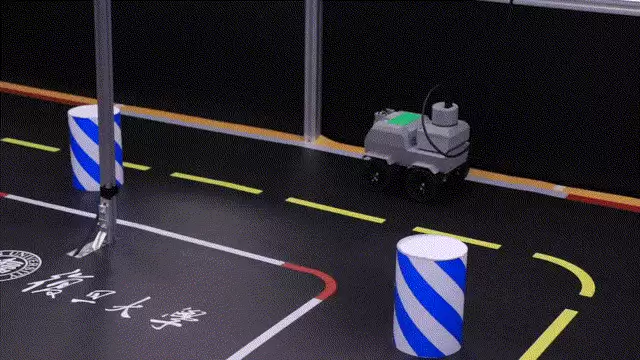
配套的线下实验沙盘小车系统实验教学平台
虚拟仿真平台与线下沙盘小车系统形成了“数字孪生”关系。线上平台内置了5万张由线下沙盘小车采集的实景道路图片,提供10套可选训练集和5层卷积网络模型,学生可自主设计并修改。
“线上平台还配有16个小时的教学视频和18个关键知识点,涵盖从深度学习框架到自动驾驶系统集成的完整知识体系。”胡波说。学生登录平台后,既可以操作“巡线实验”或直接进入“人工智能自动驾驶”主实验,也可以学习人工神经网络、卷积神经网络、模型超参数调优等理论知识。“理论课程还邀请企业一线工程师参与录制和讲解。学生们在平台上就能了解工业界采集数据、设计模型、处理边界情况的真实场景。”
一门课串联AI落地全流程

“很多同学学人工智能,理论都懂、算法也熟,但就是不知道如何落地。”胡波说。这门课的设计初衷,就是让学生在某个具体的垂直领域里,把学到的AI知识从头到尾完整应用一遍。
具体流程是:先在虚拟仿真平台上学习基本概念、构建数据集、完成模型训练,再在线下用小车进行实景验证和道路测试。“线上可以反复调试,线下用实物验证,避免纯仿真实验容易出现的‘游戏化’倾向。”胡波解释。
选课研究生杨汝坤,来自计算与智能创新学院电子信息专业,研究方向正是自动驾驶。他说:“老师会结合自动驾驶的开发流程来讲课。这门课既能收获理论知识,也能提升实践能力。”
整个学期,学生需要完成四个循序渐进的基础实验:经典算法的巡线测试、电机及小车底盘控制、AI基础模型验证、道路采集与数据集构建。
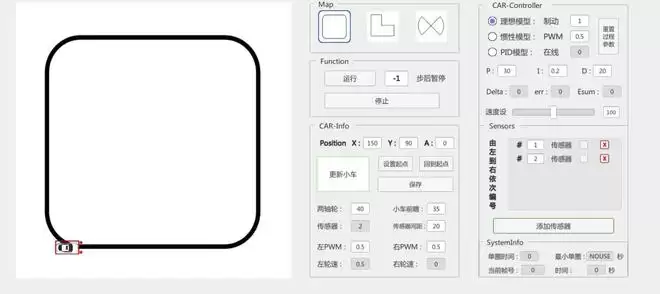
巡线实验界面
巡线实验让学生在仿真平台上验证控制模型、调整系数,让小车沿着黑线行驶,从而理解经典算法。小车底盘控制实验要求学生自己编写代码驱动电机,将程序指令转化为实际动作。AI基础模型验证则利用MNIST数据集测试AI开发环境,帮助非工科背景的同学快速上手。道路采集与数据集构建则让学生亲自操控小车采集图像、存储数据,再进行清洗、增强、标注,为后续训练模型做好准备。
智能机器人与先进制造创新学院23级的本科生吕洁熙说:“我们平时都是拿现成的数据集做实验,很少自己采集过数据。真正动手才发现,数据标签可能失衡,采集策略会影响模型效果,这些不亲身经历是体会不到的。”
当AI模型“跑”进物理世界
课程最吸引人的环节,莫过于把训练好的模型部署到小车上,让它在沙盘赛道上真实奔跑。
考核当天,学生的小车要在设有障碍的赛道上跑完三圈。成绩怎么算?课程采用了一套不公开的评分规则。“碰撞扣多少分,出界扣多少分,系数不公布,只给一个框架,具体倍数和权重都是黑盒。”杨汝坤说。

课程另一位负责人林青副教授解释:“如果规则完全公开,大家可能只去优化那几个指标,反而偏离了学习目的。”学生只能根据公开方向自己摸索最优策略,比如降低接管率、避免碰撞、减少越界、提升速度。“每人有顺时针和逆时针各一次机会,取高分作为最终成绩。”
考核当天,杨汝坤的小车遇到了突发状况。“比赛环境和之前数据采集的环境不太一样,模型表现不如自己测试时那么理想。”在他看来,这正是实践的价值——数据处理和模型泛化能力的问题,只有在真实场景中才会暴露出来。
不公开的规则倒逼学生思考更深层的问题。赛道上障碍物随机摆放,其中一个被特意放在弯道后方,形成视野盲区。小车进入弯道前看不到,转过弯才发现障碍就在眼前,来不及反应。
杨瑞麒的模型就撞上了这个挑战。基础模型没有记忆能力,只能根据当前一帧图像做判断,容易直接冲向危险区域。他想了三种解决办法:加强训练让模型反应足够快;改变驾驶策略,在不确定区域默认切入外道;或者重写一个带记忆能力的模型。时间有限,他选择了第二种。“让小车在那个位置默认切外道,不管有没有障碍都这样。虽然多绕点路,但能保证最大视野。”考核当天,障碍物恰好摆放在那个刁钻位置,他的策略非常奏效:全程零碰撞,接管率只有3%。
跨专业、本研融通:让不同起点的学生都有收获
这学期选课的14名学生中,一半是本科生、一半是研究生。专业背景五花八门:计算机、电子信息、生物医学……课程对编程基础有一定要求,但更看重动手意愿。
“这门课允许本研学生跨学段选修,难度等级为4级。我们降低了门槛,但提升了天花板。”林青说。课程采用“4+4+2”结构:40%理论知识,40%基础实践,20%挑战考核。理论部分鼓励自主探索,实践部分必须完成基础实验,挑战部分完全开放,学生可以用自己的模型参赛。

“课程难度适中,照顾到了不同基础的同学,”杨汝坤说,“但如果你想做得更深,空间也很大。”他私下里已经开始尝试训练自己的模型,希望在数据预处理和模型结构上获得更多自由度。
杨瑞麒坦言,这门课让他对自动驾驶有了系统性认知。“以前只是看新闻,知道这个行业很火。现在了解了数据采集、数据集构建、模型训练部署、车体架构、底盘控制——很多因素共同推动。”他正在为个人模型展示环节做准备。
不止于课程,更是创新的起点
课程所在的自主集群系统实验室里,除了沙盘赛道,还有一个模拟驾驶舱。学生坐进去,眼前屏幕显示着小车第一视角,方向盘和踏板可以操控小车。这个设备背后,使用的是同一套技术平台。

“我们这个系统是开放的。”林青说。学生如果觉得不够挑战,可以自己增加难度。“上学期23级的本科生王锦秋在课程展示时,拿出了别人都没做过的特别算法,效果很好。”
这门课的影响力已经超出了课堂本身。虚拟仿真平台在国家虚拟仿真实验教学课程共享平台上线上线,面向全国高校开放。平台数据显示,目前有近百所高校用它上课,“有的学校一学期就有上百名学生使用。”林青说。
课程还衍生出多项复芏计划(FDUROP)科创项目。去年,23级本科生张子程负责的登辉项目“虚实映射可灵活配置的自动驾驶人工智能教学实验装置研发”以全校优秀结项。今年,22级本科生肖子璇与胡波的AI+师生共创登辉项目“基于AI算力芯片部署的自动驾驶教具系统研发”,完成了国际上前沿算法的复现,还基于沙盘提出了自己的“BEV”建图优化算法,计算效率提升数倍。23级本科生田佳雨与林青的AI+师生共创登辉项目“基于通用AI大模型技术的自动驾驶验证平台研发与实践”,验证了大模型实现自动驾驶的可行性,用“双脑驱动”等方法解决了实时性与准确率问题。
在胡波看来,课程的目标不是让学生学完就能直接进入企业做自动驾驶开发。“工业界的要求比这复杂得多。我们希望学生了解整个流程,知道人工智能如何落地,会遇到哪些挑战,并且有能力去迭代和优化。”




