NVIDIA Isaac Lab四足机器人Newton训练实战指南
机器人仿真的核心在于物理引擎,它构建了一个高保真的虚拟世界,使机器人的运动、碰撞与交互都能高度还原真实物理规律。借助这一基础,研发人员能够安全、高效且低成本地训练算法、验证原型,将试错风险控制在数字空间内。
然而,仿真环境无论多么精细,仍会与真实世界存在微妙差异,即业界常说的“仿真到现实的鸿沟”。要有效弥合这一差距,关键在于采用统一、可扩展且支持高度定制的物理建模方案。该方案需能灵活适配多种求解器,以应对现实中千变万化的物理交互场景。
本文将介绍如何基于 NVIDIA Isaac Lab 这一强大平台,结合 Newton 物理引擎,完成两项典型机器人任务:一是训练四足机器人实现从起点到终点的稳健行走;二是构建一个集成工业机械臂的多物理场仿真环境,执行如叠衣服等需要精细操作的任务。
Newton:专为机器人学习打造的开源物理引擎
Newton 是一个面向机器人学习与开发的开源物理引擎,由 NVIDIA、Google DeepMind 与 Disney Research 共同推动,并由 Linux Foundation 进行管理,旨在成为机器人领域的通用物理基础。
在技术架构上,Newton 基于 NVIDIA Warp 与 OpenUSD 构建,能够以更高精度、更快速度与更强扩展性,支持机器人学习处理复杂任务。其突出优势在于良好的兼容性,可与 MuJoCo Playground、Isaac Lab 等主流机器人学习框架无缝协作。更重要的是,Newton 求解器 API 为包括 MuJoCo Warp 在内的多种物理引擎提供了统一接口,这些接口运行于张量数据模型之上,从而能轻松融入 Isaac Lab 的训练流程中。
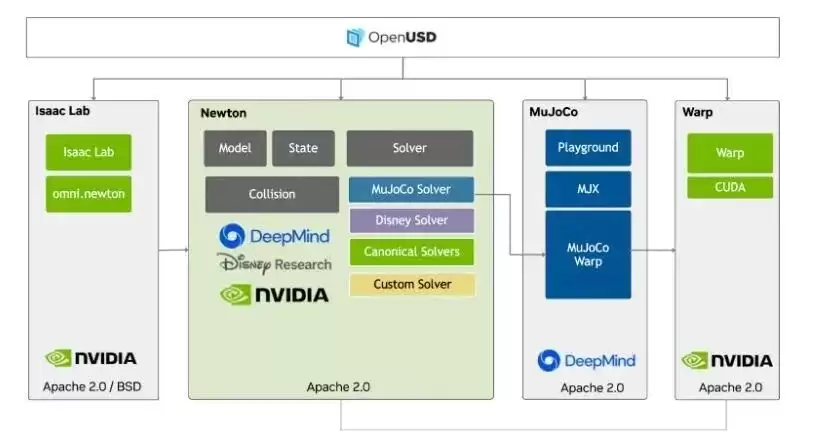
上图清晰展示了 Isaac Lab、Newton、MuJoCo 及 Warp 之间的架构关系。Newton 本身是一个独立的 Python 包,提供 GPU 加速的接口,专门用于描述机器人系统的物理模型与状态。
实战:在 Isaac Lab 中使用 Newton 训练四足机器人运动
将 Newton 物理引擎全新集成至 NVIDIA Isaac Lab,显著提升了机器人研发工作流的效率。它带来更快速、更稳定的仿真体验,为机器人从虚拟测试走向实际部署、实现工程落地提供了坚实的底层支持。
针对四足机器人运动训练任务,利用 Isaac Lab 与 Newton 的结合,开发者可高效搭建训练环境、设计奖励机制,通过强化学习等方法,使机器人学会稳定、灵活的点对点移动。这一过程大幅加速了运动控制策略的开发与验证周期。
进阶:使用 Newton 独立引擎实现多物理场耦合仿真
真实场景中的任务往往涉及多种物理现象的耦合。例如叠衣服任务,就同时包含刚体(机械臂、夹爪)与可变形物体(布料)之间的复杂相互作用。多物理场仿真的价值正在于此——它能在统一框架内捕捉这些不同类型的物理耦合效应。
这使得对机器人设计、控制算法及最终任务性能的评估更加贴近现实,同时也为基于数据的系统优化提供了可能。Newton 不仅可与 Isaac Lab 协同使用,开发者也可在独立模式下直接通过 Python 调用,搭建并实验各种复杂的物理系统,探索更多前沿应用场景。
生态:Newton 正成为机器人学习的新一代基础平台
一项技术的生命力往往取决于其生态发展。Newton 的开源生态系统目前正处于快速成长阶段,已吸引全球众多顶尖高校与企业关注并集成。例如,苏黎世联邦理工学院机器人系统实验室、光轮智能、北京大学、Style3D、慕尼黑工业大学等机构,均已基于 Newton 集成专用求解器并开发相应工作流。
从精细触觉感知到复杂布料仿真,从灵巧手操作到复杂地形运动规划,这些来自前沿领域的合作案例充分表明,Newton 正在演进为一个通用的基础平台。它不仅是物理引擎,更是推动机器人学习领域向前发展、有效缩小“仿真与现实差距”的关键基石。
相关攻略

NVIDIAIsaacLab集成开源Newton物理引擎,基于Warp和OpenUSD构建,提供统一、可扩展的机器人仿真方案。它支持高精度快速学习,能与主流机器人学习框架无缝协作,高效训练四足机器人运动控制,并构建多物理场仿真环境处理刚体与可变形体交互。其开源生态正吸引全球顶尖机构参与。

云深处科技升级四足机器人巡检系统,通过优化运动控制、结构减振、三轴稳定与算法校准,提升动态作业中的感知稳定性。系统能在跑动中清晰完成仪表读取、测温等精细任务,并适应复杂路况与长期重复巡检,保障电力场景下的可靠性与精度。

蔚蓝科技发布新一代消费级四足机器人BabyAlphaA3,具备自主感知与决策能力,可在家庭中主动交互。产品采用自研计算集群与国产芯片,实现高性价比算力,能本地流畅运行大模型。感知系统全面升级,支持复杂环境下的精准导航与避障,并构建了全栈安全防护体系。该机器人计划于2026年上市。

4月14日,高德地图相关负责人向第一财经记者独家透露,公司已在具身智能这一前沿技术领域进行了深度战略布局,并已连续发布多款自主研发的具身智能大模型。与此同时,高德正积极探索包括四足机器人和人形机器人在内的多种智能硬件产品形态,以推动技术落地。据悉,其首款四足机器人产品研发已进入最后阶段,预计将于近期

4月16日,科技行业传来重磅消息:阿里巴巴集团旗下高德地图,正加速布局具身智能硬件领域,其首款自主研发的四足机器人即将问世。据悉,这款产品已确定将于2026年北京亦庄半程马拉松赛事中首次公开亮相,并与前沿人形机器人同台展示。此举不仅是高德在智能机器人赛道的关键一步,更标志着其具身智能技术完成了从核心
热门专题







热门推荐

《Paralives》开发商承诺所有后续更新永久免费,拒绝付费DLC模式。15人小团队依靠首发销售额即可支撑多年运营,无需依赖额外内容包维持开发,展现了与《模拟人生》系列不同的差异化竞争思路。

2025年5月28日,比亚迪王朝网全新力作——宋Ultra DM-i正式推向市场,共推出5款配置车型,官方售价区间为12 99万至15 99万元。此次定价策略极具突破性:一款拥有310公里纯电续航能力的中型插电混动SUV,直接下探至13万元级别市场。作为王朝网络的新旗舰,该车明确瞄准高频出行需求场景

先来关注一个有趣的细节:苹果首款折叠屏手机,传闻将于今年秋季正式亮相。产品命名可能为iPhone Ultra,也有媒体称之为iPhone Fold——无论最终叫什么,这都将标志着苹果在折叠形态领域首次“出手”。 近日,配件厂商iFunSmart已率先上架iPhone Ultra的首批保护壳——这绝非

山寨币ETF迎来批量上市潮,首批项目市场表现如何?一文分析 Binance币安 欧易OKX ️ Huobi火币️ 最近,市场出现了一个不容忽视的新动向:XRP、DOGE、LTC、HBAR等现货ETF已经悄然登陆美国市场。与此同时,A VAX、LINK等资产的同类产品也正在审批流程中。进入11月以来,

近日,公司对SteamDeck1TBOLED版涨价300美元至949美元,上架短短不到24小时便再度售罄。据外界分析,该公司从中国大量补货并分批投放库存,高溢价未影响众多玩家的抢购热情与速度,其人气极其旺盛无比足以支撑快速清空。