高德首款四足机器人亮相北京 具身智能开启新赛道
4月16日,科技行业传来重磅消息:阿里巴巴集团旗下高德地图,正加速布局具身智能硬件领域,其首款自主研发的四足机器人即将问世。据悉,这款产品已确定将于2026年北京亦庄半程马拉松赛事中首次公开亮相,并与前沿人形机器人同台展示。此举不仅是高德在智能机器人赛道的关键一步,更标志着其具身智能技术完成了从核心算法到实体硬件落地的重要跨越。
高德此次进军机器人硬件领域,背后是扎实且连贯的技术布局。回顾其近期动作:今年1月,公司正式成立具身智能事业部;2月便密集发布了通用具身操作模型ABot-M0与全栈导航基础模型ABot-N0。据业内消息,四足机器人与人形机器人均被纳入该部门的长期产品研发蓝图。由此可见,硬件产品的推出是其技术积累迈向商业化应用的必然结果。
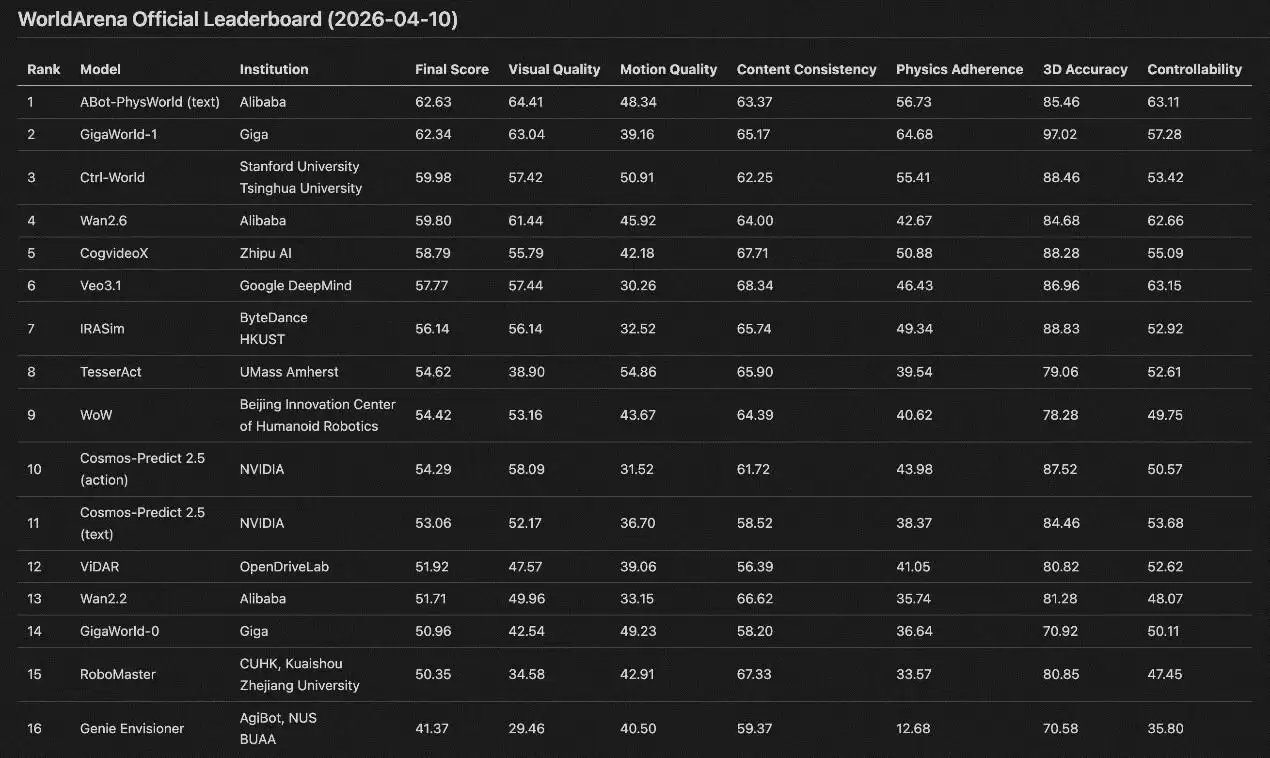
那么,高德在具身智能领域的技术实力究竟如何?其核心自研的具身世界模型ABot-World近期在国际舞台上表现卓越,在AGIbot World Challenge及World Arena两项权威基准测试中均夺得榜首。值得关注的是,其评测成绩超越了包括谷歌、英伟达在内的多家国际顶尖科技公司与研究机构,这为其硬件产品的智能化水平提供了强大的算法保障。
与此同时,采用统一架构设计的具身操作基础模型ABot-M0已全面开源。该模型的突出优势在于,能够通过一个“通用智能中枢”驱动多种形态的机器人执行任务,并在Libero等标准测试中展现出领先的性能。而专注于导航能力的ABot-N0模型,则在CityWalker等七项国际主流具身导航基准测试中刷新了纪录。这些算法上的突破,共同解决了机器人“感知环境、路径规划与精准操控”等一系列关键难题。
对于上述业务进展,高德官方已予以确认。在最新声明中,高德表示团队正持续优化具身智能模型体系,并同步推进四足及人形机器人的产品研发。其中,首款四足机器人产品预计在近期正式发布。从提供数字地图导航服务,到赋能实体机器人智能导航,高德的这次战略拓展,已进入实质性落地阶段。
相关攻略

4月16日,科技行业传来重磅消息:阿里巴巴集团旗下高德地图,正加速布局具身智能硬件领域,其首款自主研发的四足机器人即将问世。据悉,这款产品已确定将于2026年北京亦庄半程马拉松赛事中首次公开亮相,并与前沿人形机器人同台展示。此举不仅是高德在智能机器人赛道的关键一步,更标志着其具身智能技术完成了从核心

5月15日至16日,杭州举办国际具身机器人场景应用大赛,聚焦实战能力。赛事核心为四足机器人变电站智能巡检挑战赛,在模拟变电站中设置复杂地形通行、仪表识别等环节,统一使用指定机器人设备,比拼策略与应变能力。比赛检验了机器人在崎岖路况下的稳定与灵活性,为技术提供了真实场景。

高德布局具身智能,首款四足机器人呼之欲出 4月14日,高德公司相关负责人向媒体确认,公司已在具身智能领域进行了深度战略布局。目前,高德已连续发布多款自主研发的具身智能模型,并正积极探索包括四足机器人和人形机器人在内的多种智能硬件产品形态。据内部消息透露,其首款四足机器人产品预计将于近期正式亮相。 这

3月9日消息,据投中网报道,国内具身智能企业魔法原子(Magic Lab)今日正式宣布完成超5亿元A轮融资,并同步启动规模达百亿的具身智能生态基金。这笔融资由天空工场创投基金、拓普集团、金雨茂物、苏
近日,在2026年世界移动通信大会(MWC)上,智元机器人(AGIBOT)展出了其全系列通用具身机器人产品矩阵,其中智元旗下酷拓四足机器人与中国电信联合首次公开展示“6G+四足机器人”的联合创新成果
热门专题







热门推荐

今年三月,谷歌DeepMind高级科学家Alexander Lerchner发表了一篇重磅论文,其核心结论清晰而深刻:基于算法的符号操作在结构上注定无法产生真正的意识——无论未来模型规模如何庞大、架构如何精巧,甚至是否为其配备仿生身体,这一根本性限制或许都无法被跨越。 仔细审视这一论断,它并非一个关

研究针对AI助手难以执行复杂屏幕操作的问题,构建了CUActSpot评测基准,通过代码渲染自动生成含精确坐标的多样化训练数据,并训练了一个40亿参数模型。实验表明,提升训练数据多样性比单纯扩大数据规模更能有效增强模型通用操作能力,并展现出跨任务泛化潜力。


《迷你世界》于2026年5月15日发布全新激活码,玩家可凭兑换码领取酷炫角色装扮、迷你币及稀有道具,请及时复制有效激活码前往游戏内使用。

《我的世界》于2026年5月17日发布免费兑换码EMMMyxhjVHMApsb2,可兑换游戏道具与装饰。兑换码常有时间或次数限制,请尽快使用。更多兑换码可查看官方汇总页面。