无人驾驶技术如今发展到什么阶段了?全球自动驾驶出租车(Robotaxi)的领军者Waymo近期动态,或许能为我们揭示行业的最新进展与未来方向。
近日,Waymo联合首席执行官德米特里·多尔戈夫(Dmitri Dolgov)在一次深度访谈中,分享了公司在技术路线与商业运营上的关键突破。技术层面,Waymo已全面转向端到端(End-to-End)架构,但其核心策略是在云端训练一个强大的基座模型,再通过“蒸馏”技术将其转化为轻量级模型部署于车辆。商业化数据则更为亮眼:其服务每周完成订单量超过50万单,已覆盖美国11个主要城市,并正积极拓展至英国伦敦和日本东京市场——2026年,很可能成为Robotaxi服务全球化的元年。

作为亲身见证自动驾驶技术从实验室挑战赛走向大规模商用21年的行业先驱,多尔戈夫的见解不仅揭示了技术演进的路径,也描绘了这项技术普及后可能重塑的社会出行图景。
端到端是必要路径,但非唯一答案
多尔戈夫确认,Waymo确实已采用端到端自动驾驶技术,但这并不意味着完全摒弃传统的模块化方法。他认为,将两者完全对立是一种“错误的二分法”。
纯粹的端到端系统如同一个黑箱:输入传感器数据,直接输出控制指令。这种模式对仿真训练提出了极高要求——必须生成极度逼真的完整虚拟环境,这不仅技术难度大,训练和评估效率也相对较低。
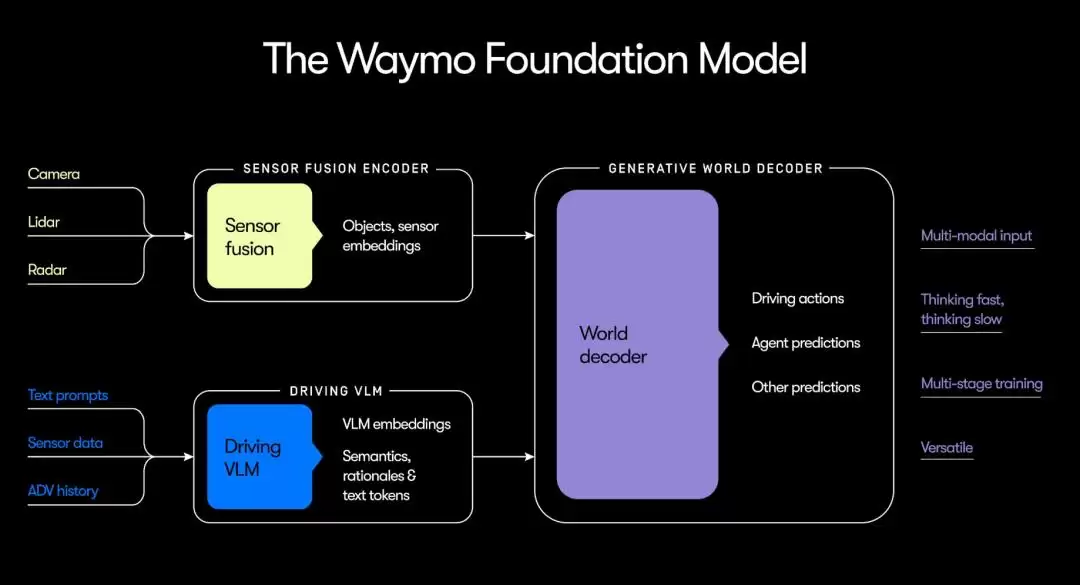
Waymo的解决方案是一种创新的混合架构:以端到端模型为基础,同时融入来自真实世界的结构化先验知识,例如高精地图、交通规则、路标信息等。基于此,他们在云端构建了一个名为“多模态世界行为语言模型”的基座模型。该模型本质上属于世界模型范畴,其“语言”能力主要通过视觉语言模型(VLM)来引入通用的常识与语义理解。
这个强大的云端基座模型主要承担三大核心任务:
首先是驾驶行为学习,作为“教师模型”掌握驾驶技能,随后将其能力蒸馏至车端的“学生模型”;其次是仿真模拟,用于生成高保真的虚拟场景以进行系统训练;最后是评估优化,用于判断驾驶决策的优劣,从而持续改进驾驶模型。
多尔戈夫坦言,如果仅面向L2级辅助驾驶,或许一个优秀的“司机”模型就能解决大部分常规问题。但要实现真正的L4级无人驾驶,就必须引入“仿真器”和“价值评估器”来应对那些极端罕见的长尾场景。
这也意味着,专注于L2的厂商并非没有机会进入L4赛道。但多尔戈夫强调,两者并非简单的线性升级,它们需要解决的技术难题存在本质差异——从L2到L4,是一次质的飞跃。
Waymo第六代硬件套件,成本已可比肩ADAS
除了软件架构,多尔戈夫也分享了硬件方面的最新成果。Waymo第六代自动驾驶套件依然坚持多传感器冗余融合的技术路线,集成了激光雷达、毫米波雷达和摄像头,并对三者的设计进行了统一与简化。

他坚信,激光雷达具备纯视觉方案难以替代的独特优势。他分享了一个典型案例:一次,Waymo车辆正准备起步,前方一辆公交车完全遮挡了视线。然而,激光雷达探测到公交车另一侧底部有一个微弱的移动信号。系统仅凭此信号,便判断可能有行人正在移动,并预判其将从车后走出。于是,车辆提前减速并微调方向,预留出安全空间,成功规避了潜在风险。

尽管传感器配置豪华,但多尔戈夫透露,第六代套件的成本已大幅降低,达到了可与主流高级驾驶辅助系统(ADAS)相媲美的水平。这听起来令人惊讶,尤其是在特斯拉坚持纯视觉路线、激光雷达产业链在美国尚未完全成熟的背景下。Waymo如何实现如此程度的成本控制?这本身就是一个强烈的行业信号。

当然,挑战依然存在。多尔戈夫指出,在寒冷气候下,传感器的清洁、除霜加热以及冰雪湿滑路面的车辆控制等一系列独特难题,仍是需要持续攻克的技术关卡。
自动驾驶商业化进程全面加速
新技术与新硬件的结合,正为Waymo注入强劲的增长动力。多尔戈夫公布了一组关键运营数据:Waymo累计订单总量已突破2000万单,其中一半是在过去7个月内完成的。目前,其周订单量稳定在50万单,自动驾驶车队规模约3000辆,每周无人驾驶里程高达640万公里。
这一发展速度在2026年有望进一步加快。除了在美国本土的11座城市持续运营,Waymo计划于今年在英国伦敦和日本东京启动服务部署。这标志着Robotaxi正式迈出跨国运营的步伐,开启全球化新阶段。
然而,全球化部署并非易事。多尔戈夫坦言,尽管模型的泛化能力日益增强,但进入一个新的城市,仍然需要进行深入的本地化适配。这包括收集本地交通数据、针对特有的道路场景和驾驶习惯进行优化验证。此外,与当地监管机构的高效沟通以及赢得社区居民的信任,是与技术落地同等重要的关键环节。
未来的延伸:从Robotaxi到私家车
谈及更广阔的商业化前景时,多尔戈夫提到了一个有趣的“边缘案例”:在人口稀少的偏远地区,部署Robotaxi服务从经济模型上看可能并不划算。
但这并不意味着自动驾驶技术无法惠及这些区域。多尔戈夫透露,Waymo的自动驾驶系统未来同样可以适配并部署到私家车辆上。换言之,未来体验全自动驾驶不一定非要通过网约车,个人拥有的汽车同样可以具备L4级自动驾驶能力。
这是一个颇具象征意义的行业转折:当一些L2公司试图向上探索Robotaxi服务时,Robotaxi领域的领导者却在考虑将其技术向下赋能至私家车市场。由此可见,在端到端技术路径逐渐趋同之后,L2高级辅助驾驶与L4无人驾驶的商业模式,似乎也正在走向融合与交汇。




