光轮智能:构建具身数据SuperApp,加速智能体拟真进化
编辑部 整理自 MEET2026量子位 | 公众号 QbitAI
从大模型智能的“语言世界”迈向具身智能的“物理世界”,仿真正在成为连接落地的底层基础设施。
在本次量子位MEET2026智能未来大会上,光轮智能联合创始人兼总裁杨海波给出了他的观察:
具身智能的规模远大于文本与视觉模型,因为数据维度更真实、更复杂。
这也就意味着,具身智能时代的核心,不是算法本身,而是它所依赖的数据是否有效、可扩展——仿真是唯一能够解决数据问题的方案。
在仿真策略的路上,会遇到仿真不真实、Sim2Real不可靠等行业痛点,光轮智能正在通过自研的一整套“测量、生成、求解”仿真基础设施来解决这些问题,为具身智能提供数据、训练、评测的全流程解决方案。

另外杨海波还进一步指出,仿真不是孤立的技术工具,需要以真实产业需求为锚点,通过应用场景构建生态。
其中,具身仿真资产制作是生态的源头活水,依托自动化物理测量与生成技术,产出高物理真实的规范化数据资产,为具身训练提供核心燃料;大规模RL训练则通过并行的虚拟场景让智能体高效试错学习,将数据价值转化为具身实际技能,同时反向打磨仿真引擎的算力与精度;具身智能仿真评测则以标准化任务树立具身行业训练标尺,推动数据与训练体系持续迭代。
三者环环相扣、互相赋能,让仿真从技术突破走向产业赋能,成为支撑具身智能规模化发展的基础设施。
在此基础上,光轮智能建立了全球最大的遥操数据采集工厂大规模RL训练平台LW-BenchHub行业首个工业级机器人评测平台RoboFinals,协同组成全栈仿真平台,为具身智能从实验室走向真实世界提供关键跳板。
为了完整呈现杨海波的思考,在不改变原意的基础上,量子位对演讲内容进行了整理编辑,希望能提供新的视角与洞察。
MEET2026智能未来大会是由量子位主办的行业峰会,近30位产业代表与会讨论。线下参会观众近1500人,线上直播观众350万+,获得了主流媒体的广泛关注与报道。
核心观点梳理
光轮智能在业界以仿真合成数据被大家所熟知,而支撑这套数据体系的底层是我们全栈自研的仿真基础设施。这套基础设施也是未来支撑世界模型及物理AI落地的关键。为什么传统仿真的Sim2Real总是失效?主要有三方面:物理不够真实、资产视觉失真、交互行为不准确。光轮智能全栈自研了“测量、生成、求解”三位一体仿真解决方案。实际去自动化物理测量真实世界,而不再依赖猜测和经验,并在仿真下进行视觉、物理交互、动作等与真实测量对齐的生成,从而缩小Sim2Real gap。没有好的生态支撑,仿真平台无法持续发展。真正好的仿真平台从来都不是独立的,而是需要生态构建,需要海量的使用场景来验证和优化,也需要持续的商业回报来加强技术投入。光轮智能从一开始就聚焦于打造仿真领域的“爆品应用”,包括仿真遥操数采、大规模仿真强化学习训练平台LW-BenchHub、为具身前沿模型打造的行业评测标准RoboFinals。以下为杨海波演讲全文:
具身智能与世界模型的“数据机会”比大模型及智驾大千倍
和大家分享一下我们在做的事情。
光轮智能被大家熟知更多的是仿真合成数据,今天分享的是支持这套数据体系的底层系统,自研的仿真基础设施。
我们在这套基础上做了很多开发和演进,我们认为这也是支持世界模型包括物理AI落地的关键。
简单介绍一下公司,我们底层依托仿真推进AI进入物理世界,公司产品包括服务具身和世界模型的仿真合成数据,包括评测和Sim2Real的部署。
2024年成立,商业化进展比较快,我们几乎服务了所有具身和世界模型的头部客户,包括了英伟达、DeepMind、Figure AI等美国的一些具身和世界模型,包括国内字节、阿里,还包括一些场景方,包括TOYOTA、吉利,利用我们的数据,我们把本体真正的Sim2Real落地到工厂当中。
我们和学术界也有很好的合作,上个月自研的仿真工作流成为Hugging Face最新指定的仿真环境。
我们认为,具身世界模型的数据机会将会是大语言模型的1000倍。
原因在于两个维度,首先智驾是视觉游戏,唯一的物理交互只有车辆和地面的动力学,而具身与之不同,具身需要实现力的反馈、逻辑电路和阻尼等多维度,数据也更加复杂,比如说,当我进入家中、拉开冰箱的门,需要实现有力的反馈,这样就多了一个维度,数据也更加复杂。
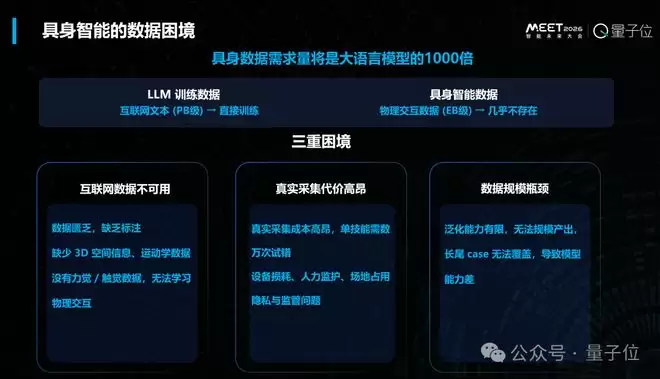
另一方面,从预训练数据角度来说具身有很多机会,大语言模型包括智驾在内,其实预训练数据都是现存的,大语言模型消耗几十年来互联网上沉淀的数据,自动驾驶也需要不断地传回数据。
目前大家做的预训练更多的是对数据的收集、处理、加工、标注、筛选等,但具身是没有本体在跑的,这里有巨大的预训练需求。
真机数据还面临着成本高昂、易坏、人力维护等问题,特别是它的场景比较单一,我也曾多次提过,它存在Real2Real的差距,比如我们自主搭建的“真实厨房”场景,和现实世界的厨房在细节和形态上仍有很大差距。现实里大量长尾情况在搭建场景中往往缺失,这些差距很难补齐。
要解决这一切,我们认为依靠仿真是一个有效的办法。
至于为什么过去的仿真会失效呢?我觉得主要是三个方面。
第一个是物理不够真实,物理的理论模型包括参数,都靠猜测或者经验,力的系数也不准确,视觉没有做到足够真实,比如材质、纹理、光照,要不特别精细造成工程化难度,要不无法支持视觉的需求。
另外一个则是交互不准确,举个例子,当我们进入房间打开灯的同时,既要听到声音有响动又要看到灯光亮起来。再比如开冰箱门,动作也不是“物理上把门推开”这么简单,而是要克服门边磁吸的吸附力才能打开——这种交互关系如果没建对,仿真就会偏差很大。
这样下来,就导致仿真和真实世界之间存在巨大的差异,从而影响真实环境的部署,成功率也从理论上的100%降至5%。
那么如何解决这个问题呢?
光轮智能自研“测量、生成、求解”三位一体的仿真平台
我们自研了一套“测量、生成、求解”三位一体解决方案,建造了一座“虚实对标物理测量工厂”,而不再依赖猜测和经验。
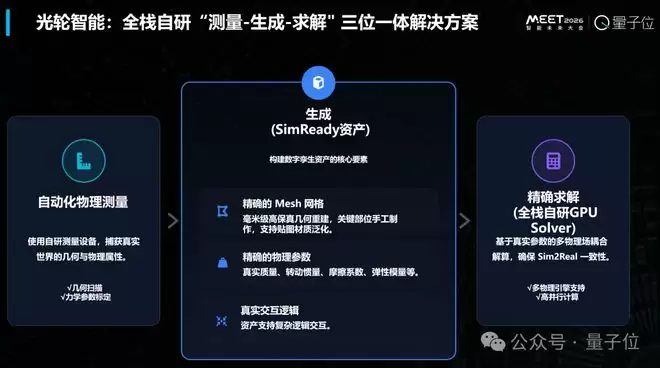
自研的核心是一整套生成系统,包括资产、场景、力的对齐,当中需要和真实世界100%对齐,例如力的反馈、力的大小等,解析用的是全自研GPU的Solver,它确保生成成功后, Sim2Real能够足够真实。
前面提到传统仿真依赖猜测和经验,我们自研测量设备,实现自动化物理测量,真实对标物理世界打造仿真工厂
测量之后则是生成,当中最关键的是资产和场景,需要同时满足视觉真实和物理真实,并覆盖钢体、铰链、流体、可形变物体等,其中流体会像蛋糕奶油或水一样缓慢流下来,可形变物体如线缆,覆盖了工业、居家等各种场景。
我们在全球范围内定义了这部分的行业标准,主流的厂商都在follow我们的规范,这个规范叫LW-Ready,不仅是物理上的Ready,也包括服务遥操的Ready,和RL的Ready。
过去这方面很混乱,大家在仿真中用X代表横还是Y代表横都不一致,现在光轮统一和规范了市场。
以下是我们仿真的几个案例:
第一个是工业的门,第二个是医疗场景下的脏器,其脆度、柔度要符合真实世界,第三个是香肠,不仅可以视觉看到,还可以从不同的角度切开它,而且这个力也对应真实世界的分布。
最后一个是草莓,这是服务于我们的农业客户,仿真下可以用相应的力把草莓摘下来,力大了就拽断,力小了就拽不下来,完全对齐真实世界的规范。

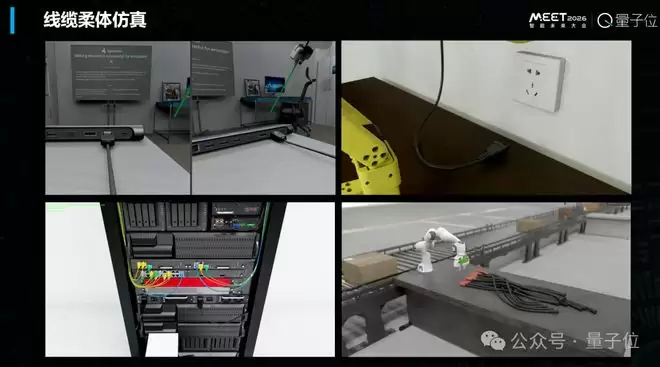
这是线缆,线缆是一个圣杯级的难题,可以看到曲度变化插拔接口的效果,不同力度都能实现准确的仿真,这帮我们赢得很多工业级客户,刚才提及的进入场景的客户,很多也都看到了我们在线缆上的一个重要突破。
这是厨房场景,随着卷帘拉动,卷帘会随着真实变化转动,同时不仅卷帘本身变化,窗外光影也会随着卷帘变化而变化,符合真实世界光影。

介绍完仿真场景之后,我们介绍高保真的力学仿真,因为要具备符合真实世界的资产和场景,就需要在仿真下实现准确的力学生成
我们的资产场景是彩色电影,其他仿真器是黑白电视机,无法实现我们的资产场景,因此我们在力学上做了很多工作,确保实现资产的效果。
通过力学参数设计保证磁吸、阻尼、开门等工作,同时保证力学方向属性的对标。利用不同参数的调试,让门对应不同的力完成开合。
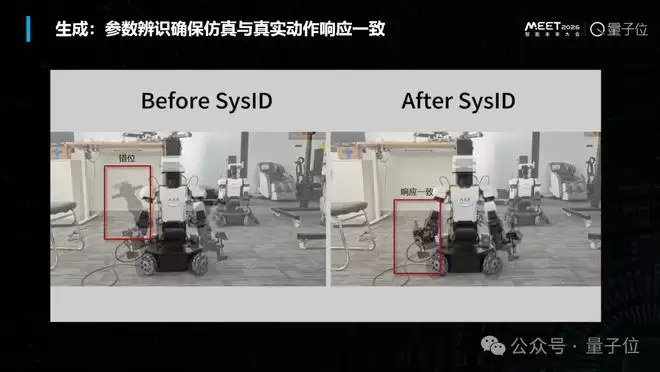
生成仿真场景之后,需要在场景内构建准确的机器人基础模型,才能真正在仿真世界中采集数据、训练。而想要构建准确的机器人基础模型,参数辨识必不可少。
参数辨识,就是指有了资产场景和力的生成后,仿真的机器人跟物理世界的机器人对齐包括控制器参数、钢度、阻尼、物理属性、摩擦模型、质量分布,还包括执行器特征、速度、力矩,以及时序对齐、控制频率、系统延时等等,都要和真实世界进行对齐。
只有这些参数辨识准确了,仿真机器人和真实机器人在接到相同的控制信号之后才能产生一致的行为和动作,包括轨迹、时序和动力等,弥合Sim2Real Gap,确保在仿真中训练的策略能可靠地迁移到真实硬件上,减少部署失败率。
这里Demo左边是没有对齐的情况,阴影是仿真效果,右边是对齐的。
自研仿真的最后一步是求解,这是仿真的心脏,需要运用深度的计算物理、数值分析、刚体动力学、接触力学、约束求解等多个领域的知识,还需要千万级自由度实时求解,确保数值稳定性和计算效率的平衡,每个环节都充满挑战。
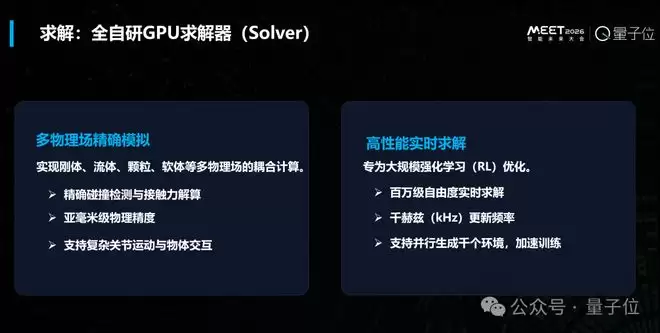
我们的Solver是全栈自研的GPU Solver,可以支持百万级自由度的求解,实现刚体、流体、球体多物理场的耦合,物理精度达到亚毫米级,更新频率达到千赫兹。
我们这套引擎还能支持对机器人任务进行优化,在接触力计算、抓取模型、行走稳定性等关键环节都有独特的算法创新,确保可以服务到具身的需求。
生态支撑和商业化加速落地,RoboFinals成为领先的模型评测标准,持续推动仿真平台发展壮大
在攻克很多技术难题后,我们清晰认识到没有好的生态支撑,仿真平台就无法持续发展,就像安卓生态的发展离不开微信、美团、滴滴这些APP。
仿真平台之间不是独立的,需要进行生态构建,需要海量的使用场景验证优化,也需要持续的商业回报加强技术投入。
过去很多企业没能做好仿真,其中一个原因就是没有找到爆款应用支撑持续演进,我们从Day 1就开始设计这种生态上的爆款应用,第一个是仿真遥操数据,第二个是大规模的RL训练,第三个就是具身的仿真评测。
第一个应用是我们全球最大的仿真遥操采集工厂,同时我们在东南亚也有基地,我们自研的这套框架和硬件,包含不同采集方式,包括6D鼠标、AR、VR等,运用自动化质检、标注以确保数据的质量。
对于这样一套服务国内外最顶级客户的产线,无论是世界模型公司还是具身公司,大家最在意和关注的还是物理交互真实世界的底层设计。
第二个应用是大规模RL系统平台LW-BenchHub,可以在高仿真环境中开展大规模RL训练,同时运行成千上万的并行仿真实例。
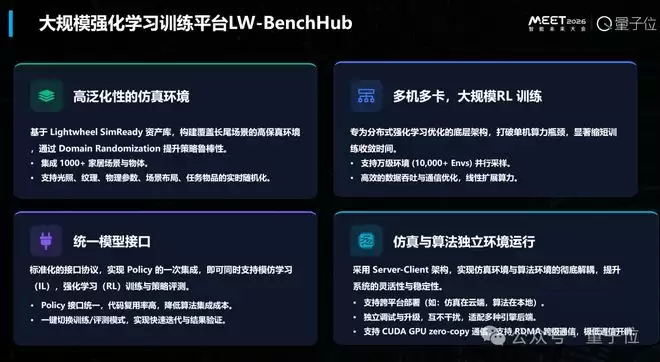
每个实例都会尝试不同的抓取策略和力控参数,虚拟环节中的零件也可以无限复制,即使出现碰撞,也不会造成任何损失,机器人还能24小时不间断工作,这都是真机环境中无法实现的,
训练平台上还可以自动生成极端、长尾的场景,包括位置偏差、表面污渍、轻微形变,都可以增强机器人的鲁棒性。
第三个是我们刚刚发布的RoboFinals。
现阶段全球顶尖的AI Lab都在面临相同的困境:模型已经超过所有学术基准,无法真正评估它们的真实能力,衡量技术与前沿水平的差距。
而这套RoboFinals涉及一百项工业级任务,涵盖家居、工厂、零售等真实场景,支持跨机器人、跨仿真器的统一评测,为行业提供标准化度量工具。
目前RoboFinals评测平台已经成为全球使用频次最高的仿真应用之一,这也是业内首个针对前沿机器人模型的工业级平台,非常逼真,其中各项场景任务都是基于真实需求完成的设计,还有大量的泛化过程确保场景足够多样。
以上就是公司全栈仿真平台介绍,我们希望自研的这套仿真平台可以把复杂的物理世界抽象成可以使用的工作能力,本质上是构建一个数字平行的宇宙,让更多团队可以精力集中在本体或者任务设计上。
而做好仿真,一直都是实验室工作转变为行业基础设施的必经过程。
未来我们希望和上下游伙伴,包括算力、世界模型公司、具身公司以及各行各业应用方协同,把自研的仿真底座打磨得更稳、更准和更易用,用扎实的能力支持具身产业的长期发展,驱动机器人迈向通用的人工智能时代,谢谢大家!
相关攻略

周二晚间,AI领域迎来了一则重磅消息。在权威AI评测平台Artificial Analysis的榜单上,一个名为「HappyHorse-1 0」的神秘模型异军突起,一举登顶视频生成能力排行榜,引发了业界的广泛关注与热议。 这一成绩极具含金量。无论是文本生成视频,还是图像生成视频,HappyHorse

当AI开始学会“脑补”物理世界的运行规律,并尝试模拟一个动态变化的真实环境时,我们距离那个传说中的通用人工智能(AGI)究竟还有多远? 进入2026年以来,“世界模型”毫无悬念地成为了科技圈最炙手可热的核心议题。它标志着一个关键的范式转变:人工智能正从被动地“感知当下”,迈向主动地对时空与动态变化进

上周三关于“世界模型”的线上沙龙反响空前热烈,这充分表明,从被动感知迈向主动推演,这条被视为实现通用人工智能(AGI)的核心技术路径,正深度吸引着整个AI行业的关注。鉴于持续高涨的讨论热度,我们决定加开一场深度分享会。 那么,这条充满潜力却又极具挑战性的前沿赛道,目前进展到了何种阶段?顶尖的研究者们

数字逻辑与物质建构的深度对话 ——评许哲诚“境域·生成”计算性设计展演 □ 丁雅力(江苏省美术馆策展人) 当代设计与造物的核心范式,正经历着由计算性设计带来的深刻变革。2026年3月20日,南京艺术学院教师许哲诚于南京莫玄空间呈现的“境域·生成”个人专场展演,正是这一前沿趋势的集中体现。本次展览超越

近日,开源具身智能原生框架Dexbotic宣布正式支持以RLinf作为其分布式强化学习后端。对具身智能开发者而言,这不仅是一次普通的工程适配,更意味着VLA模型研发中长期存在的「SFT与RL割裂」问题,正在被真正打通。 这是一种典型的「乐高式协作」:双方不强行Fork、不粗暴揉合代码,而是保持清晰边
热门专题







热门推荐

苹果MacStudio库存见底,预示新款即将发布。外观预计延续经典紧凑设计,接口布局不变。核心升级为M5Max和M5Ultra芯片,性能大幅提升,但内存供应可能受限。固态硬盘速度有望翻倍。作为苹果专业桌面新旗舰,其起售价可能小幅上调,WWDC大会可能是发布窗口。

对于使用尼康Z卡口APS-C画幅(DX格式)相机(如Z fc、Z30、Z50)的摄影爱好者而言,在套机镜头之外选择一支定焦镜头,是提升创作自由度和画面质量的关键一步。尼克尔 Z DX 24mm f 1 7正是这样一款专为轻量化与大光圈设计的定焦镜头,目前京东售价1899元,为追求便携与画质平衡的用户

自动驾驶技术的分级标准正面临行业内部的深度反思与重构。在2026北京车展上,小马智行联合创始人兼CEO彭军发表的观点,将行业关注的焦点从技术参数转向了更为根本的责任归属议题。 彭军明确指出,当前广泛采用的L1至L5自动驾驶分级体系已显得“极其无厘头”。他认为,这些层级划分并非衡量自动驾驶商业化前景的

4月28日,《商业内幕》发布的一篇深度报道,揭示了特斯拉自动驾驶承诺背后日益凸显的信任危机。多年来,“未来将实现完全自动驾驶”是特斯拉吸引消费者的核心卖点,但对于众多早期支持者而言,这一愿景正变得愈发渺茫。 图1:马斯克确认HW3车型无法升级至无监督版FSD 问题的根源在于硬件代际差异。在近期举行的

当AI智能体不仅能说会道,还能帮你订餐、写报告,甚至用周杰伦的风格唱首歌时,汽车行业的竞争焦点,已经悄然从硬件参数转向了软件生态。这届北京车展,就是最好的证明。 “你能让它用周杰伦那种吐字不清的风格,唱首歌吗?”在火山引擎的展台,一位体验者向工作人员提出了这个有趣的要求。指令下达后,座舱里的“豆包”