2024年的上海外滩大会上,Kevin Kelly抛出了一个很有意思的设想:全球主义正在加速推进,我们正在合力打造一台基于技术的“超级计算机”。每一部手机、每一台笔记本电脑和数据服务器,都在这个计划中成为这台巨型计算系统里一个个微小的“神经元”。
用他的话来说,我们正在创造一台行星般规模、全球性的巨大机器。人们可能对设备和应用有不同的偏好,但这些差异说到底只是交互方式的不同,从根本上讲,它们现在都属于同一个平台。世界上所有的数字技术,包括人工智能在内,都是在这个新平台上运行的。
如今,这台“超级计算机”正以前所未有的规模高速运转,驱动着创新不断加快。新发明和新思想的传播速度也比过去快得多。比如,人们开始用增强现实和虚拟现实来培训员工;通过机器和各种传感器来感知物理世界;利用ChatGPT等工具来学习新知识,这些已经成为常态。
人工智能群体智慧:一个亟待开发的方向
尽管当前的人工智能已经具备了基本的逻辑推理能力,但它仍然处于早期阶段。目前,AI主要被当成工具来用,价值主要体现在提升效率上。不过,AI最有潜力的地方在于它有着与人类完全不同的思维方式。未来,如果能注入想象力和主观能动性,AI或许能解决那些仅靠人力无法应对的社会难题。
机器学习领域的泰斗、美国“三院院士”Michael I. Jordan指出,当前关于AI的讨论中普遍缺失三个关键要素:集体性、不确定性以及激励机制。
他解释说,生活本身充满了不确定性,人类同样也是不确定的。人与人之间的交流,本质上是在创造一种降低不确定性的文化,这也是人类做得最出色的事情之一。但现在的AI系统并不擅长这个——它既不懂得如何思考不确定性,也不会“抱团”来共同应对不确定性。相比之下,人类在面对不确定性时表现得很出色,尤其是当大家协作起来的时候。
因此,除了提升单个智能体的能力,Jordan呼吁建立一种能体现集体智慧的协同智能体系统。他认为,在AI的构建中,如何让机器具备类似的人类群体协作能力,已经成为一个亟待解决的关键课题。仅仅把人类的智慧嵌入人工智能远远不够,现代信息技术在医疗、交通、金融科技和商业领域的深度应用,需要建立一种能够集体协作的智能系统。但如何让当下的AI系统具备这种集体智能,仍然是一个充满挑战的难题。
智能的两次涌现
人工智能的发展经历了两次智能涌现。第一次是神经网络的神经元数量突破某个量级,产生了质变。模型技术已经发展了多年,比如早期的Bert本身就是大模型。之所以GPT能带来革命性的影响,是因为它的参数超过了一定规模——突破了100亿、1000亿,GPT-4甚至达到了万亿级别,量变引发了质变。
第二次群体智能的涌现,本质在于当单体的Agent足够多,各行各业的专业Agent都能被调动起来协同合作。当这些Agent被聚集在一起,共同完成某项任务时,这个过程中就有可能产生新的发现。
事实上,人类很早就认识到,通过群体合作集思广益,解决问题的效果往往能超越个体智慧的总和。关于群体智慧的强大力量,有一个经典的实验可以说明:在一个玻璃罐里装满糖果,请参与者来猜测糖果的数量,记录每个人的答案、答案的平均数,然后与真实数字做对比。
以美国哥伦比亚商学院的实验为例,罐子里的糖果实际有1116颗。73个学生参加了实验,每个人给出的答案虽然各不相同,但都与1116相去甚远。然而,这73个答案的平均数却是1115颗——与真实数量仅差1颗。这本质上是一个预测问题,其结果恰恰体现了群体的智慧。
卡内基梅隆大学的组织行为学专家Anita Woolley表示,影响一个团队发挥群体智慧的最大因素,就是成员之间的协调程度。尽管群体协作能带来1+1>2的效果,但知易行难。
人类社会文明的演进,从农耕时代、工业时代到知识网络时代,再到现在的数据智能时代,人工智能在渗透社会生活的同时,也辐射到了群体智慧。在机器文明时代下,能否将人类的群体智慧真正融入人工智能,形成单体智能的放大效应,从而进一步释放人类社会的潜能,这是一个值得深思的问题。
当单个智能体相互关联并协作时,它们能够形成一个复杂而强大的群体智能系统,从而催生出更加卓越的智能涌现行为。这已经成为人工智能近年来一个重要的研究方向。
群体智能(Swarm Intelligence, SI)这一概念,最早源于对蚂蚁、蜜蜂等社会性昆虫群体行为的研究。1991年,意大利学者Dorigo提出了蚁群优化(Ant Colony Optimization, ACO)理论,群体智能由此作为一个理论被正式提出,并迅速吸引了大批学者关注,掀起了研究热潮。

1995年,Kennedy等学者提出了粒子群优化算法(Particle Swarm Optimization, PSO),此后群体智能的研究迅速铺开。目前,群体智能的研究主要围绕两大方向:智能蚁群算法和粒子群算法。智能蚁群算法的代表包括蚁群优化算法、蚁群聚类算法和多机器人协同合作系统。其中,蚁群优化算法和粒子群优化算法在解决实际问题时应用最为广泛。
群体智能的核心在于分布式决策和协作。它通过算法让众多小型智能单元协同工作,共同解决复杂问题。这项技术的应用范围相当广泛,从交通优化、城市规划、工业生产到智能医疗等领域,都能看到它的身影。
举个例子,在智能交通系统中,每辆车都是一个智能体。它们需要根据路况和交通规则来选择合适的速度和路线,同时还要与其他车辆和行人进行沟通协调,以避免碰撞和拥堵。在智能医疗系统中,每个医生、护士、患者和设备都是一个智能体,它们需要根据病情和资源分配来制定合理的诊疗方案,同时与其他智能体进行信息共享和决策协商,来提高医疗服务的效率和质量。
以交通场景来说,公路驾车群体按照交通规则,以公路系统为平台,由一群具备单体智能的人类驾驶员或自动驾驶车辆组成。单体智能的弱点在于,个体的感知、通讯和控制能力是局部的,而这与其行为决策对全局的影响性之间存在着矛盾。
对人类驾驶员而言,由于交通互动的无序和对未知环境的不了解,在遇到突发状况、并道或绕过路障时,很难保持正常车速,往往会因降低车速而导致道路拥堵。
对自动驾驶车辆来说,它在行驶过程中处理问题的优先级通常是以自身为出发点——以自身的安全与效率最大化为前提。如果每辆车都这样规划,就会产生很多冲突和矛盾。比如在路口,常常由于相互博弈而卡住不动。随着自动驾驶汽车数量的增加,这类问题会越来越突出。
如果没有外部干预,单纯依靠自动驾驶车辆自身的决策系统,很难形成对全局更优的结果。这时就需要一个能够掌握全局信息的群体智能系统来进行全局协调。虽然群体智能所产生的结果对单个车来说可能不是最优的,甚至效率还会降低,但从全局来看,它却是一个效率最高的最优解,能够实现系统效能的提升。
比如在一个路口,全局最优解是要保证所有人的通行时间都能被节省,而不是只为某一台车节省时间。
目前国家正在大力推行的车路云一体化,就是群体智能的典型代表。它通过各类传感器、云控平台、感知算法、数据融合、预测模型等设备和技术,把每一辆车、每一台基站等智能个体,都变成一个信息节点。这些节点互联互通,形成一个可以共享信息、协同运行的智能体网络。这个智能体网络从全局视角,为自动驾驶车辆提供最优行驶路径建议,从而解决交通效率问题。
从系统发展角度看,自动驾驶追求的是越来越极致的智能化,而车路云一体化追求的是极致的系统智能。一个是单点的智能化,一个是系统的智能化,只有这样,才能在不同维度上解决不同的问题。单点的问题交给单车去解决,系统的问题交给系统去解决,必须在不同层面用不同的方式来解决,而不是试图用一套方法解决所有问题。
未来,当无人机、机器人、机器狗等更多智能体接入车路云网络,它们就能直接获得城市更加丰富、完整的信息。自动驾驶车辆可以获得完整的交通信息,无人机可以获得空域的数字化信息,机器狗、机器人可以获得各自行驶路径上相应的环境信息。这样一来,一个完整、安全、高效、实时的超级智能体网络就建立起来了,以此为基础的智能城市也将由此诞生。
Science在2016年发表了一篇论文《群体之力量》(The Power of Crowds),其中提出:当结合群体智慧与机器性能来解决快速增长的问题时,群智计算按难易程度分为三种类型:实现任务分配的众包模式、支持较复杂工作流模式的群智、以及最复杂的协同求解问题的生态系统模式。
在具身智能领域,由大模型驱动的多智能体高效协作是重点研究方向之一。
此前,大模型在具身智能中主要用于解决单智能体的任务规划问题。然而,由于大模型的知识和特定的具身环境没有对齐,大模型生成的规划往往难以在实际环境中执行。
举例来说,在打扫房间的任务中,大模型给出的规划可能是首先找到吸尘器。然而,环境中可能根本没有吸尘器,只能靠扫帚来完成这个任务。
这时,大模型需要通过与环境的多轮交互和反馈来适应具身环境,这会产生高昂的交互成本。
在多智能体环境中,每个智能体都使用大模型来控制。当多个智能体协同完成一项任务时,除了会遇到类似单智能体的环境不适配问题,还面临多智能体如何高效沟通和协作的难题。
如果直接通过多智能体对话协商来进行协作,效率很低。一方面,很难完全通过对话得出有效的协同策略;另一方面,无法衡量单个智能体对总体任务目标的贡献(即信度分配),难以驱动每个智能体改进策略来提升总体收益。
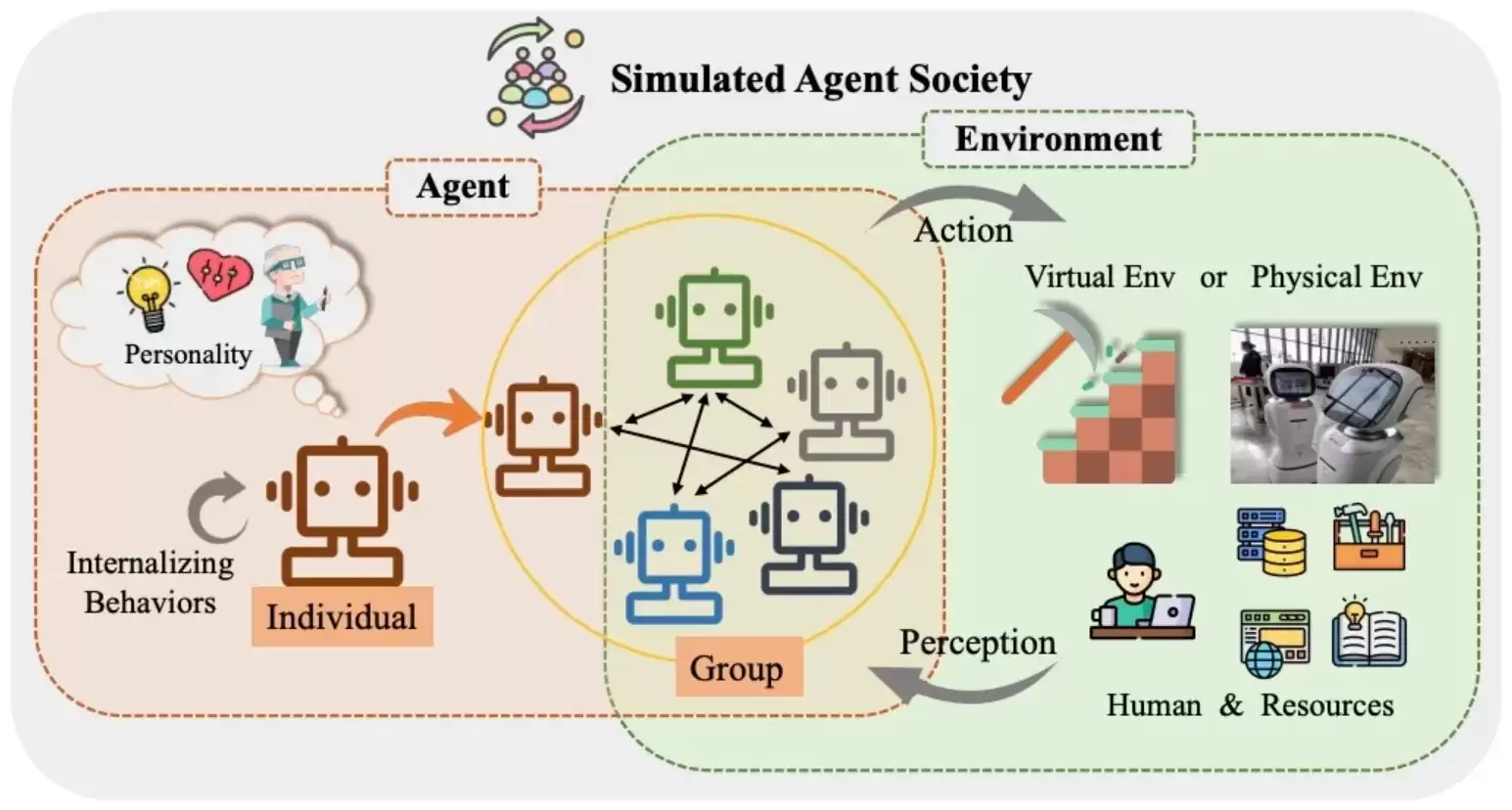
因此,多智能体协作系统(Multi-Agent Collaboration Systems, MACS)就显得十分必要。它的目标是让多个智能体能够有效地协作,实现超出单个智能体能力范围的任务。该系统可以用于模拟和优化交通、能源、物流等复杂系统,也可以用于智能家居、智能城市、智能工厂等场景的设计和实现。
在MACS下,多智能体协作框架(Multi-Agent Collaboration Framework, MACF)提供了实现智能体间合作与竞争的方法和工具,包括智能体建模、交互协调、评估优化、适应演化和人机交互等方面。它主要用于协调和控制多个智能体,来实现共同目标或解决共同问题。其核心是平衡智能体间的合作与竞争,解决任务分配、策略选择、信息共享、学习方式和人类参与等关键问题。
MACF的分布式协作方式,强调在分散环境中智能体间的信息共享和任务分配,通过强化学习、反馈、智能合约等手段提高性能和适应性。当前,比较主流的多智能体技术框架包括AutoGen、MetaGPT、XAgent、AutoAgent、CrewAI等。这些项目从不同角度提出了智能体系统规划模块的改进建议,涵盖长短期规划、规划输出格式、用户提示拓展解释、反馈迭代机制等方面,为多智能体高效协作奠定了技术基础。
需要指出的是,多智能体产生群体智能的前提,是单个智能体本身已经具备较高的智能化水平。单智能体的能力边界,很大程度上影响着群体智能的发挥。就好比蚁群或蜂群,个体数量再多、组织再严密,也造不出摩天大楼。因此,充分激发单智能体的能力,是释放群体智能价值的前提;反过来,群体智能也会进一步开发单体智能体的潜力,两者形成互为支撑、相互融合、相互促进的良性关系。
前途光明,但道路曲折
尽管还存在算法复杂性、环境不确定性、人机交互以及伦理法律等方面的挑战,但群体智能的发展前景依然广阔。它可以广泛应用于机器人、交通、教育、军事等各个领域,在提高系统性能和效率、增强系统鲁棒性和可扩展性、促进系统与人类的协同和互动方面发挥重要作用。
在机器人领域,群体智能可以使机器人完成更复杂、更困难的任务,提高机器人的灵活性和可靠性。比如在智能仓库中,每个机器人需要根据订单的内容和优先级选择合适货物和路径,同时在群体智能系统下与其他机器人协作,从而提高仓库的运营效率和客户满意度。
在智能救援场景中,机器人需要根据灾害的类型和程度选择合适的工具和方法,同时需要与其他机器人协同和支持,来提升救援的成功率和安全性。群体智能可以让机器人根据环境变化和任务需求,自动调整救援策略,并与其他机器人或人类进行有效协作。
在教育场景中,群体智能可以调动教师、学生、课程等各类资源,根据学习者的特征、需求、目标和进度,制定科学合理的教学和学习计划,从而提升教育效果。
在军事领域,群体智能还可能开启未来战场的全新模式。比如在超视距侦察系统中,无人机、卫星、雷达和传感器作为相互独立的智能体,需要在群体智能的系统框架下,根据任务要求和资源限制,与其他智能体合作,进行信息收集和全面分析,从而提高侦察的准确性和及时性。
虽然目前还没有一个完整的框架来理解人工智能和群体智能之间的交互,但作为人工智能的新兴分支,群体智能不仅展示了技术的革新力量,也为我们勾勒出一个智能社会的未来图景。在这个充满可能性的时代,我们期待群体智能为人类带来更多惊喜和便利,同时也需要保持警惕,确保科技进步的每一步都为人类福祉服务。




