清华联合斯坦福推出具身世界模型Ctrl-World
Ctrl-World是什么
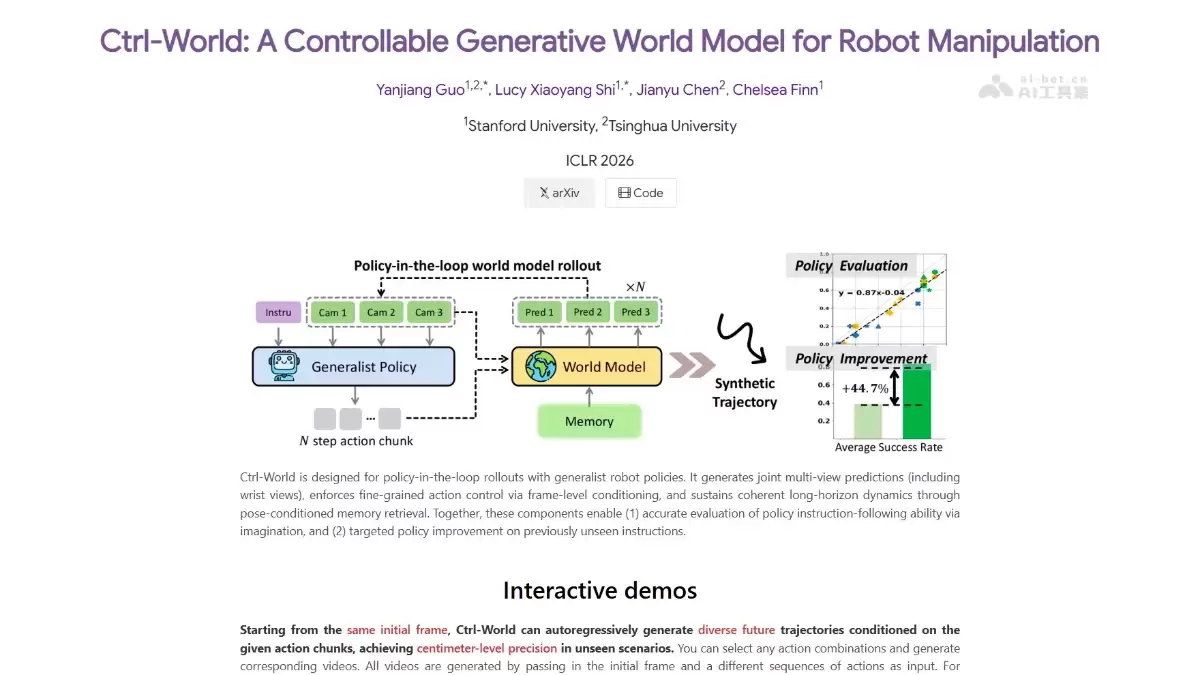
在机器人技术研发中,一个核心挑战是如何在虚拟仿真环境中,高精度地模拟真实物理世界的复杂规律。近期,由清华大学陈建宇团队与斯坦福大学Chelsea Finn团队联合研发的具身世界模型——Ctrl-World,为此提供了突破性解决方案。该模型在权威评测平台WorldArena上取得了卓越成绩:具身任务能力位列全球第一,视频生成质量高居全球第二。
Ctrl-World的独特之处在于其创新的设计理念。它采用了动作条件化架构,并将物理引擎的约束深度整合到模型学习中。具体而言,模型将机械臂关节角度、夹爪开合度等实际动作参数作为直接输入,强制模型学习动作与场景状态变化之间明确的因果关系。这一设计从根源上避免了物体穿透、不合理的隔空吸附等在仿真中常见却违背物理定律的错误现象。
其最终性能表现令人印象深刻:模型能够实现厘米级的运动轨迹精度,其策略评估结果与真实物理环境的一致性系数高达0.986,深度预测准确率也达到了0.93。这意味着,在Ctrl-World构建的高保真虚拟环境中进行测试,其结果可信度极高,几乎等同于在真实世界中的测试效果。它为机器人策略的训练与验证提供了一个可靠的“数字孪生”平台,有望显著降低从算法开发到实际部署的整体成本与技术风险。
Ctrl-World的主要功能
这个强大的“数字孪生”仿真平台,具体能为机器人研发提供哪些核心支持呢?其功能紧密围绕机器人开发的关键流程:
策略评估:这是Ctrl-World的基础功能。开发者可以将训练完成的机器人控制策略置于Ctrl-World生成的虚拟环境中进行系统性测试。得益于仿真环境与真实环境的高度一致性,评估结果极具参考价值,使得团队无需耗费巨资搭建实体测试平台,即可高效完成策略的初步验证与快速迭代。
动作规划:模型能够基于物理准确的仿真,为机器人生成一系列可执行的动作序列。这对于抓取、装配等需要精密操作的任务规划至关重要,并且支持在闭环控制框架下进行实时调整与优化。
数据合成:传统合成数据常因物理不合理而导致“仿真训练、真实失效”的领域适应性问题。Ctrl-World能够生成物理逻辑自洽的视频与动作配对数据,这些高质量数据可直接用于训练能够在真实世界中稳定运行的机器人策略,有效缓解了真实世界数据采集成本高昂、效率低下的瓶颈。
多视图预测:模型不仅能生成单视角的RGB视频,还能联合输出深度图、点云以及多视角观测信息。这相当于为机器人提供了完整的空间感知能力,是执行复杂三维操作和自主导航任务的重要基础。
Ctrl-World的技术原理
能够实现如此高水平的物理保真度,得益于以下几项关键技术的深度融合:
动作条件化架构:如前所述,这是模型的基石。它将机器人的动作参数作为明确的生成条件输入,强制模型学习“特定动作将引发场景如何变化”这一物理因果关系,从而确保生成的结果符合动力学规律。
物理引擎约束嵌入:为了使学习过程更高效、结果更准确,研究团队在模型训练中引入了物理引擎进行监督。牛顿力学定律被内化为模型的生成硬约束,确保输出的每一帧画面都严格遵守质量、摩擦、碰撞等物理守恒定律,而不仅仅是视觉上的逼真。
记忆增强的多视图预测:为了在长时序动作序列中保持场景状态的一致性,模型采用了稀疏历史帧检索与姿态条件化投影技术。同时,其联合预测框架能一次性输出多视角的RGB图像、深度图和点云结构,实现了精准的三维空间认知,这也是其能达到厘米级轨迹精度的核心技术保障。
Ctrl-World的项目地址
对于希望深入了解或实际应用该技术的研究人员与开发者,项目团队已公开了所有核心资源:
您可以访问其项目官网(https://ctrl-world.github.io/)获取概览介绍与技术演示视频。
全部模型代码、使用示例和详细文档均已开源在GitHub仓库(https://github.com/Robert-gyj/Ctrl-World)中。
详尽的技术细节与完整的实验数据则发表在arXiv技术论文(https://arxiv.org/pdf/2510.10125)上,供学术界同行深入研读与探讨。
Ctrl-World的应用场景
总体而言,Ctrl-World的落地应用潜力广泛覆盖了机器人技术从研发到实际部署的多个关键环节:
虚拟仿真测试:这是最直接的应用场景。无论是高校实验室还是工业研发部门,都可以利用它快速、低成本地验证机器人算法与控制策略的性能,从而大幅缩短研发周期。
策略训练数据合成:当面临特定场景真实数据匮乏的困境时,可以利用该模型生成大量物理逻辑合理的仿真数据,用于补充甚至替代部分高成本的实地数据采集工作,加速机器人策略的训练进程。
动作规划与闭环控制:在具体的操作任务中,例如工业流水线上的精密抓取与装配,Ctrl-World可以为机械臂生成高精度的动作序列,并能根据实时传感器反馈进行动态调整,实现智能化的闭环操作控制。
机器人技能学习:通过生成与多样化物体、在不同空间位置进行交互的仿真数据,可以帮助机器人学习更具泛化能力的操作技能,使其能够适应未曾见过的新物体、新环境和新任务指令,向更通用的机器人智能迈进关键一步。
相关攻略

RynnBrain是什么 在具身智能领域,如何让机器人真正理解并适应复杂的物理世界,始终是核心挑战。近期,阿里巴巴达摩院发布了一项重要成果——开源了名为RynnBrain的具身智能大脑基础模型。这一模型实现了关键突破,首次赋予机器人接近人类的时空记忆与物理空间推理能力。 具体而言,RynnBrain

SkyReels-V3是什么 视频创作的门槛,正在被一项新技术重新定义。最近,昆仑万维开源的SkyReels-V3,可以说在业内投下了一枚“重磅冲击波”。它不再是一个功能单一的玩具,而是一个用单一架构就能实现专业级视频创作的“多面手”。简单来说,它能让你手里的静态照片“活”起来,变成动态影像;还能智

ClawWork是什么 如果让AI去真实世界里“打工”,它能不能养活自己?香港大学数据科学实验室(HKUDS)开源的ClawWork项目,就是为了回答这个问题而生的。它本质上是一个AI Agent的“经济生存”基准测试框架,专门评估大模型在模拟真实商业环境中的“赚钱能力”。 这套系统的规则很现实:给

FireRed-Image-Edit是什么 在AI图像生成与编辑领域,开源模型正迅速崛起,其能力已能比肩甚至超越部分闭源方案。近期,由小红书Super Intelligence团队研发并开源的FireRed-Image-Edit模型,便是这一趋势下的杰出代表。这款基于先进扩散架构的通用图像编辑AI,

在人工智能模型普遍追求规模与通用性的当下,开发者们迫切需要一款能够真正“看懂”图像、“听懂”声音、“读懂”文字,并能自由进行跨模态内容创作的“全能型”AI工具。近期,蚂蚁集团重磅开源的全模态大语言模型Ming-flash-omni-2 0,正将这一愿景变为现实。它不仅彻底打通了图像、视频、音频与文本
热门专题







热门推荐

公安部就电子数据取证规则公开征求意见,拟将网络安全等行政案件纳入适用范围,并规范取证流程与核心概念。新规特别明确了获取密码、调取通讯内容等特殊程序,需经严格审批并保障当事人权利。配套法律文书也同步优化,以构建更规范且注重权利保障的取证体系。

理想L9和LIvis的定价策略刚掀起波澜,小鹏GX的最终价格就给出了更猛烈的回应——从近40万元的预售价直降至27万元起。用小鹏产品矩阵负责人吴安飞的话说,这叫“9系的产品,8系的价格”。 这12万元的下调,效果堪称立竿见影。发布会次日,小鹏集团港股股价一度大涨超8%。更关键的是市场订单:上市12小

5月21日,环塔拉力赛新疆且末赛段大营迎来了一位备受瞩目的访客——知名零售企业胖东来的创始人于东来。他专程前往长城汽车车队营地,与参赛车手及后勤团队进行了深度交流。据悉,于东来此次自驾越野之旅已历时一月,随行车队中包含多款国产越野车型。经过实地驾驶与多维度对比,他对以长城汽车为代表的国产越野车品质给

比特币官方入口在哪里?一个核心门户的权威指南 说起比特币,很多人第一反应是去找它的“官网”或“官方App”。但这里有个关键点需要先理清:比特币本质上是一种去中心化的全球数字货币,它不属于任何一家公司或机构,而是由一个庞大的、遍布全球的社区共同维护。因此,它并没有传统意义上由某个企业运营的“官方网站”

Ring-2 5-1T是什么 在当今大模型技术激烈竞争的赛道上,追求更长的上下文处理能力和更强大的深度推理性能已成为核心焦点。近日,蚂蚁集团旗下的inclusionAI团队重磅开源了Ring-2 5-1T模型,这是一个参数规模高达万亿级别的混合线性思考大语言模型。该模型基于先进的Ling 2 5架构