L3自动驾驶进入量产周期,一个长期被低估的技术环节,正在迅速成为行业的核心基础设施——仿真。
过去几年,自动驾驶公司普遍依赖真实路测进行算法验证。但随着智能驾驶系统复杂度持续上升,这种方式逐渐暴露出明显瓶颈:
路测成本极高
极端长尾场景难以覆盖
验证周期越来越长
尤其是在端到端智能驾驶逐渐成为行业主流路线之后,系统需要面对的场景复杂度呈指数级增长。仅依靠真实世界测试,已经很难满足研发效率和安全验证的需求。
在这样的背景下,高保真仿真环境正在成为自动驾驶研发体系中的核心环节。
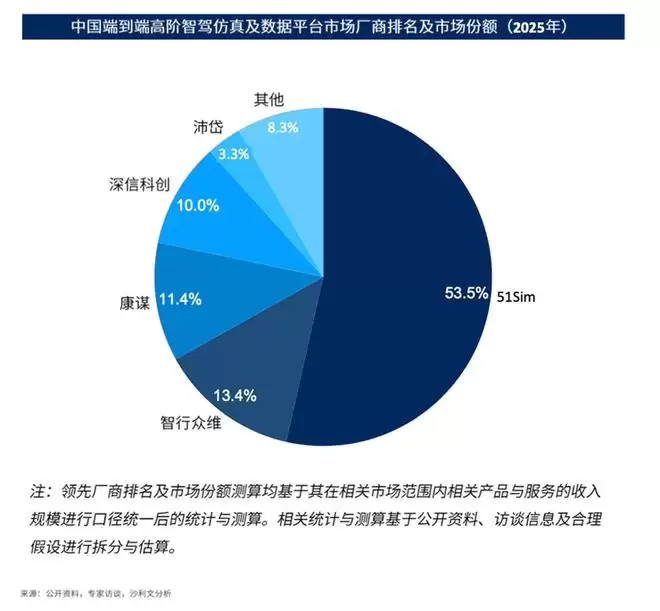
弗若斯特沙利文最新发布的《2026年中国物理AI仿真及数据平台研究报告》显示,中国自动驾驶仿真市场已经进入快速发展阶段。报告数据显示,在中国端到端高阶智驾仿真及数据平台市场中,51Sim以53.5%的市场份额位居第一,市场集中度开始明显提升。这也意味着,在这个技术门槛极高的细分赛道中,行业头部格局已经开始逐渐清晰。
从“测试工具”到“物理AI基础设施”
自动驾驶仿真的价值正在发生变化。
在早期阶段,仿真主要被用作算法验证工具,用于辅助开发团队进行功能测试。但随着自动驾驶系统规模不断扩大,仿真的角色已经逐渐升级。
在端到端模型和世界模型技术框架下,自动驾驶系统的研发越来越依赖 数据驱动训练 + 大规模仿真验证 的模式。
换句话说,仿真不再只是测试工具,而是逐渐成为:连接真实世界数据、算法训练与系统验证的核心基础设施。
这种变化背后,本质上是自动驾驶技术正在进入 Physical AI(物理AI)阶段。
与传统软件AI不同,Physical AI系统需要在真实物理环境中完成感知、决策与执行。自动驾驶车辆、具身智能机器人、工业自动化设备,都属于这一范畴。
而仿真环境,则成为这些系统在进入真实世界之前完成训练和验证的重要“试验场”。
技术门槛:高保真仿真并不容易
从技术角度来看,自动驾驶仿真远比游戏引擎复杂。
一个真正可用于自动驾驶算法训练的仿真平台,需要同时解决多个难题:
高精度场景重建
传感器物理建模
多物理场环境模拟
大规模并行仿真计算
51Sim 的核心平台 SimOne 正是围绕这些能力构建。

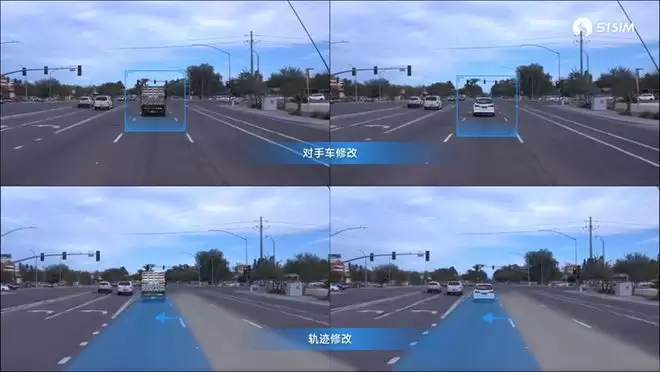
这些环境不仅能够复现真实场景,还可以生成更多变体场景,用于测试自动驾驶系统在不同条件下的表现。
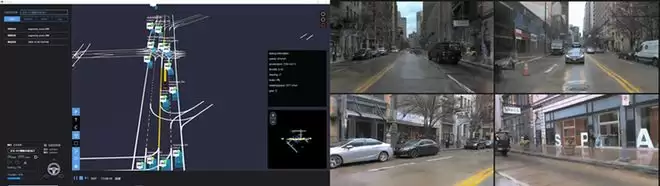
基于自研3DGS混合仿真引擎,51Sim实现了高保真场景重建,同时利用新一代的4DGS闭环仿真体系将路采数据转化为可复用的场景资产。同时结合物理级传感器模型,对摄像头、激光雷达和毫米波雷达进行高置信度仿真,使感知层测试结果能够接近真实车辆表现,为自动驾驶算法训练与验证提供可靠环境。
市场格局:仿真平台开始形成头部集中
在技术复杂度与产业门槛双重作用下,自动驾驶仿真赛道的市场格局正在逐渐集中。
一方面,仿真平台需要长期技术积累,包括图形引擎、AI算法、传感器建模以及大规模计算架构等多个领域。另一方面,仿真系统往往深度嵌入车企的研发流程,一旦接入就很难被替换。这也使得行业呈现出明显的 “平台型竞争”特征。
目前,51Sim 已服务全球超过 100 家客户,包括主流主机厂、自动驾驶公司以及Tier1供应商。其平台通常直接接入车企量产项目研发流程,从算法训练、功能验证到量产前的规模化仿真测试,都会参与其中。
随着企业在平台上持续积累场景数据与仿真资产,平台本身的价值也会不断提升。
下一阶段:仿真将成为智能系统的“训练场”
在更长远的技术演进中,仿真平台的边界还在继续扩大。
此前,51Sim即将发布的下一代仿真平台 SimOne 4.0,正试图将仿真平台从传统测试工具升级为 智能体训练环境。
新一代平台将基于:4DGS动态场景重建+生成式世界模型的模式打造 “重建 + 生成”的一体化仿真体系。
这意味着,仿真环境不仅能够复现真实世界,还能够自动生成新的训练场景,为自动驾驶系统提供持续学习环境。
物理AI时代,仿真市场持续扩张
从更宏观的产业视角来看,仿真市场的快速增长,本质上是 Physical AI(物理AI)规模化发展的必然结果。随着智能系统逐步走向真实物理环境,自动驾驶、具身智能机器人等实体智能形态,都需要在进入现实世界前完成大规模训练与验证,而仿真环境正成为关键基础设施。
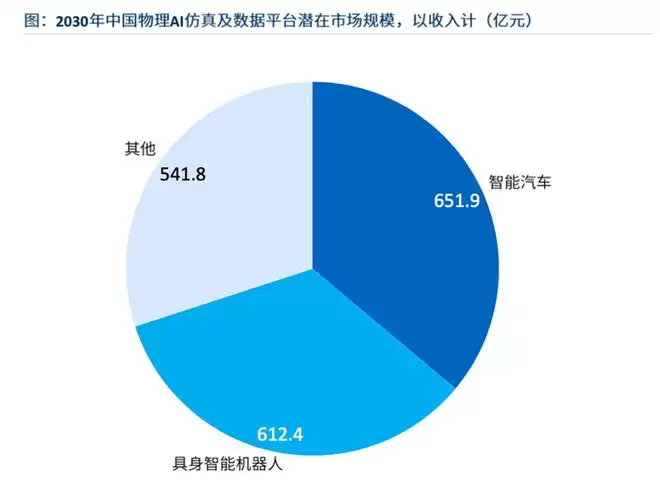
沙利文在报告中预测,到 2030年中国物理AI仿真及数据平台可渗透市场规模将超过1800亿元,其中自动驾驶作为最早规模化落地的场景,智驾仿真市场规模预计将超过650亿元。
随着端到端与大模型技术路线兴起,自动驾驶系统对数据规模与训练效率的需求不断提升,高置信度合成数据与闭环仿真成为重要支撑。在这一趋势下,仿真平台正从单纯的测试工具,升级为 数据生产与模型训练的重要基础设施。
未来五年,仿真行业将从单点技术竞争迈入规模化基础设施建设阶段。谁能够率先打通数据挖掘、场景生成、闭环验证与模型训练的完整体系,谁就有机会在这个千亿级物理AI市场中占据关键位置




