9月23日最新动态,智元机器人宣布其研发的通用具身基座大模型GO-1(Genie Operator-1)正式在GitHub开源。这款采用ViLLA(Vision-Language-Latent-Action)创新架构的模型,成为全球首个实现该技术落地的具身智能解决方案。
这款革命性模型通过独创的隐式动作标记技术,成功打通了视觉语言输入与机器人动作执行之间的转换壁垒,使机器人对复杂任务的认知水平和操作性能获得质的飞跃。此次开源意味着具身智能领域的研发门槛被大幅降低。

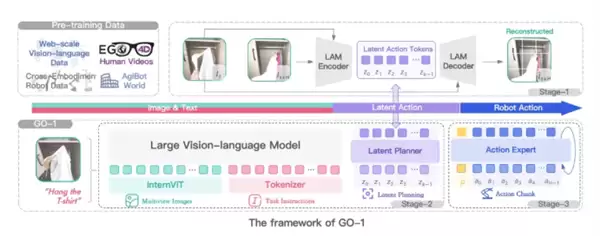
GO-1模型采用业界领先的三层协同架构设计,整合了多模态理解、隐式规划和动作生成能力,可无缝处理视觉信号、力觉反馈和自然语言指令的复杂交互。配合同步发布的Genie Studio全流程开发平台,开发者能够高效完成从数据采集、模型训练到实体机器人部署的全过程验证。
最新测试显示,GO-1模型已适配多种机器人平台,展现出优异的跨平台兼容性和仿真性能。与此同时,智元机器人发起的Genie Trailblazer全球开发者计划正在招募具身智能研究团队,重点突破通用智能模型、具身世界建模和遥操作技术三大前沿方向。




