新一代薄膜压力传感器重塑机器人触觉未来
时间:2026-07-03 13:51
第二十七届高交会“中国高新技术论坛”侧记:触觉传感器如何突破机器人智能化的最后一块短板? 由深圳市人民政府主办的第二十七届高交会于2025年11月14日至16日在深圳举行。作为高交会的重要论坛,“中国高新技术论坛”于11月14日举办,主题聚焦“人工智能赋能未来产业发展”。论坛上,悟通感控创始人兼
# 第二十七届高交会“中国高新技术论坛”侧记:触觉传感器如何突破机器人智能化的最后一块短板?
由深圳市人民政府主办的第二十七届高交会于2025年11月14日至16日在深圳举行。作为高交会的重要论坛,“中国高新技术论坛”于11月14日举办,主题聚焦“人工智能赋能未来产业发展”。论坛上,悟通感控创始人兼CEO陈立洋带来了关于触觉传感器技术的前沿分享。
先说一个核心问题:触觉传感器到底是什么?在人类进化中,感知、学习、思考、行动构成了智能演化的核心循环。当下,机器人技术在执行层面已经取得诸多突破,但触觉感知环节却相对滞后——这正是机器人难以实现我们美好愿景的关键短板。对人类来说,握笔、抓取鸡蛋、鼠标或香蕉这类简单动作,对机器人而言却极具挑战。

触觉传感器的核心使命,是赋予机器人灵巧手精准抓握的能力。而悟通感控要攻克的,是传感器“可装配、装配后稳定可靠”的关键难题。传统工业传感器虽然性能成熟,但刚性强、体积大的特点,与灵巧手精细操作的需求严重不匹配。“我们真正需要的,是具备高柔性、高灵敏度、高稳定性的薄膜传感器——这正是悟通投身薄膜传感器研发的初心。”陈立洋说。
从市场端来看,研究显示,目前全球机器人触觉传感器赛道仍处于发展初期,而国内在该领域的技术实力已领先国际。未来,精细触觉操控需求将在更多场景延伸,预计2029年全球市场规模将达4.3亿美元——从数据角度判断,这一预测或许还较为保守。
## 以下为演讲实录
(摘录自陈立洋在论坛现场的分享)
各位下午好!非常荣幸能和大家分享“新一代薄膜压力传感器技术在机器人力触觉反馈中的应用”这一主题。
触觉传感器的发展历程不算漫长,却直接决定了机器人技术的突破高度。先明确核心问题:触觉传感器到底是什么?人类进化中,感知、学习、思考、行动构成了智能演化的核心循环。而当下机器人技术里,执行层面已有诸多突破,触觉感知环节却相对滞后——这正是机器人难以实现我们美好愿景的关键短板。对人类而言,握笔、抓取鸡蛋、鼠标或香蕉这类简单动作,对机器人来说却极具挑战。李飞飞曾提出“空间智能感知”的核心观点:在AI领域,如果缺失智能感知,AI会与物理世界脱节。对于机器人来说,也有同样的困扰。

触觉传感器的核心使命,是赋予机器人灵巧手精准抓握的能力;而悟通感控要攻克的,是传感器“可装配、装配后稳定可靠”的关键难题。传统工业传感器虽性能成熟,但刚性强、体积大的特性,与灵巧手的精细操作需求严重不匹配。真正需要的,是具备高柔性、高灵敏度、高稳定性的薄膜传感器——这正是悟通投身薄膜传感器研发的初心。
中金公司研究显示,目前全球机器人触觉传感器赛道仍处于发展初期,而国内在该领域的技术实力已领先国际。未来,精细触觉操控需求将在更多场景延伸,预计2029年全球市场规模将达4.3亿美元——从数据来看,这一预测或许还较为保守。
### 核心技术路线:薄膜传感成产业化关键方向
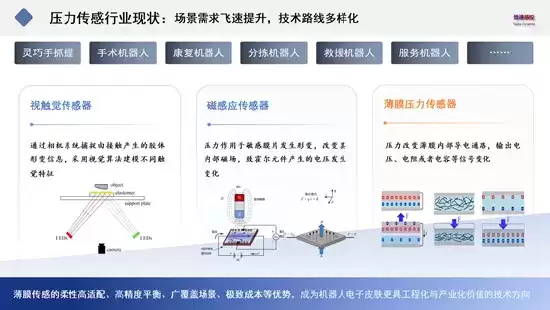
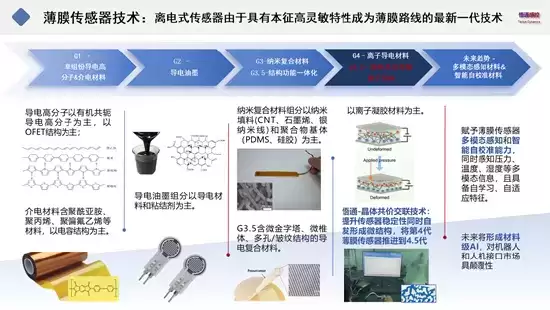
接下来,谈谈触觉传感器的核心技术路线。悟通采用的是第四代离电势柔性压敏材料。目前,手术、康复、分拣等诸多场景对抓握有非常精细的要求。主流技术有三类:一是视触觉传感器,通过捕捉弹性体形变构建触觉特征;二是磁感应传感器,磁铁靠近半导体时产生电压变化;三是薄膜压力传感器,通过压力改变内部导电特性,进而改变输出电压、电阻或电容。从光学复杂度和性能上限来看,薄膜具备高柔性、精度平衡的优点,适用场景更广泛。更重要的是,它可通过卷对卷工艺加工,成本优势显著。可以判断,薄膜传感将成为机器人电子皮肤领域最具工程化与产业化价值的技术方向。悟通采用的是第四代离电势柔性压敏材料。抓握场景——手术、康复、分拣等——对抓握精细度要求极高。目前主流三类技术中,薄膜传感器在光学复杂度、性能和成本之间取得了最佳平衡。
### 技术难点突破:从材料迭代到性能革新
薄膜压力传感器存在多个核心难点:一是量程与灵敏度的平衡,二者往往难以兼顾,薄膜因厚度限制,这一矛盾更突出;二是稳定性问题,包括蠕变、满量程稳定性及温飘,直接影响灵巧手持续抓握与反复抓握的可靠性;三是响应时间、精度与准确度的优化;最后是量产的批次一致性与寿命,这直接决定成本是否可控。
这些难点的突破,核心在于材料技术的迭代。2000年前后,导电高分子的出现让“塑料导电”成为现实,这一突破获得当年诺贝尔化学奖。自此,薄膜在传感器领域的应用潜力被广泛关注。第一代材料(含部分介电材料)因合成工艺复杂难以产业化;随后导电油墨虽验证了柔性传感概念,却存在灵敏度与稳定性不足的问题;纳米复合材料解决了稳定性难题,却未能提升灵敏度;微结构设计虽拉高灵敏度,却因微纳加工工艺推高成本。
直到第三代离子材料的出现——其内部自由移动的阴阳离子可在电极形成纳米级双电层电容,彻底解决了灵敏度问题。而悟通通过晶体共价交联离子导体技术,进一步攻克了稳定性难题。团队将原本“面接触”的材料重构为“弹簧式”结构,同时实现微结构自发形成,无需昂贵光刻模板。从第四代技术迈向4.5代,这两大突破将带来材料层面的碘伏性变革。
### 产品布局:覆盖多场景的全栈感知方案
评估薄膜传感器,内部有两个维度。
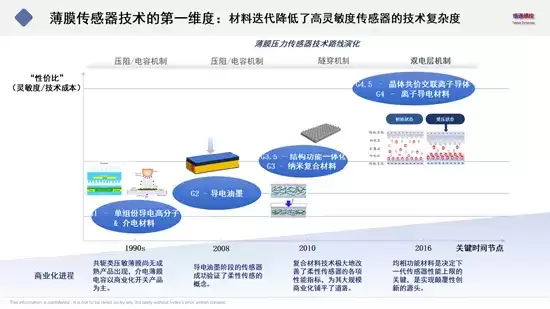
第一个维度是性价比。这里的性价比不是传统的成本性能,而是衡量实现对应灵敏度指标所需的技术挑战大小。第一代单组分导电高分子没有成熟商业化产品出现,介电膜主要用于开关电容;薄膜压力传感器从导电油墨开始,成功验证了柔性传感概念,但导电油墨结构很难通过技术提升灵敏度,因此性价比不高,只能做初步验证或教学使用,商业上很难落地。
依托深厚的技术储备,悟通已开发出一系列高灵敏、低蠕变、耐久可靠的产品:
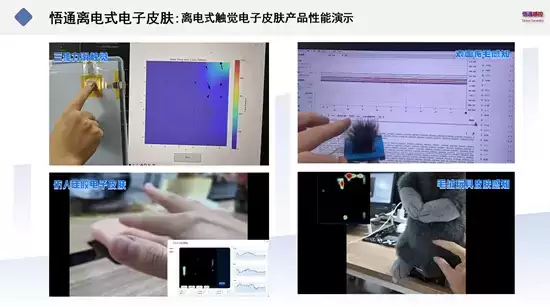
- **离电式电子皮肤:** 三维力滑触觉款兼具柔性与切向力感知,硅胶封装设计酷似人类皮肤;
- **表面覆膜传感器:** 可嵌入毛绒玩具,在“可爱经济”中注入陪伴价值,赋予产品“温度”;
- **灵巧手感知元件:** 已推进至中试规模,与头部厂商合作的智能反馈灵巧手,能实现微小力响应、三维力感知及低漂移稳定抓握(现场演示显示:左上角对微小抓握力有灵敏响应;右上角是三维力感知,抓握过程中不仅有Z方向感知,平面X、Y上也有响应;左下角是水平方向灵敏感知,抓握物体时传感器信号基本不动,稳定性极佳——若信号飘移,原本夹好的物体就会掉落;右下角是垂直方向灵敏度感知);
- **接近觉传感器:** 技术储备阶段,可实现接触前姿态调整,未来有望成为灵巧手标配;
- **智能手套:** 捕捉人类抓握姿态与力反馈,构建数据库反哺灵巧手,实现泛化操作。
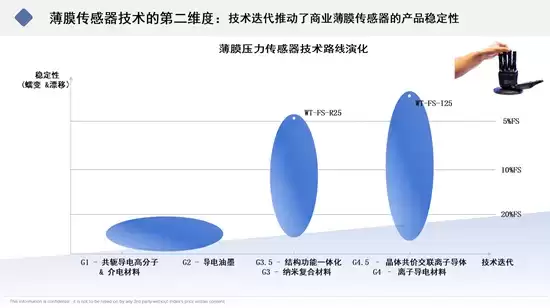
第二个维度是稳定性。多功能是锦上添花,但产品若不够稳定,很难持续实现商业化推进。评判稳定性的两个核心指标是蠕变和漂移。
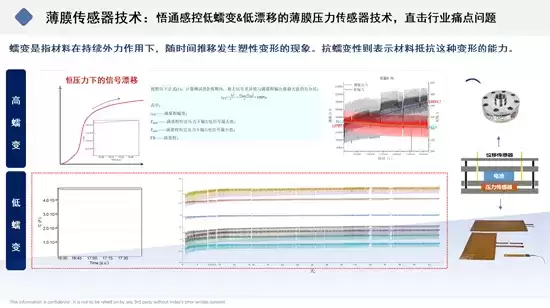
蠕变是给一个持续压力,看传感器信号长期稳定性(现场演示:左上角图反映高蠕变&现象——给恒定力,信号持续漂移;这就好比一台秤,上去时显示80斤,站两分钟后飙到100斤)。悟通开发的低蠕变传感器,给恒定压力后数据曲线始终平稳。
漂移是反复受压的性能稳定性,如持续抓握、反复抓握。目前行业内,导电油墨的蠕变和漂移一般在20%以上,纳米复合材料在10%~20%之间,少数几家能做到5%。离电这条技术路线与第三代在稳定性上非常类似——首先走离电式路线的企业并不多,其次新技术被蠕变、漂移等壁垒制约,普遍在10%~20%之间。
悟通的离电式传感器已将这一数值控制在5%以内,部分量产产品能做到低至2%。国内高端传感器领域发展较晚,更多关注灵敏度、量程、响应时间,在稳定性和蠕变上关注不足。为此,悟通牵头编写了薄膜压力传感器稳定性与抗蠕变的行业标准,同时深度参与多项薄膜相关行业标准制定,推动行业规范化发展。
### 多元场景验证:储能与医疗领域的实战突破
除机器人触觉领域,悟通还布局了储能、医疗两大核心业务板块,用严苛场景验证传感器性能:

- **储能领域:** 首次将力学参量引入电池管理系统,通过压力信号实现锂离子电池安全预警,较传统方式提前30~50分钟。已通过电池模组3000牛初始预紧力下的蠕变、漂移、电磁干扰等复杂工况技术验证;
- **医疗领域:** 数字化关节平衡感测仪通过离电传感器量化膝关节手术中的力变化,为医生提供直观数据参考,解决了传统手术依赖主观经验的痛点,大幅提升手术成功率与术后效果。相较于国外同类竞品,性能领先一代,终端价格降低75%。
悟通是一家深度融合前沿材料、传感制备与下游产业应用的全栈感知技术企业。不是对现有产品做二次迭代,而是从材料研发、封装工艺到下游应用,构建了全链条自主研发与商业化能力。

自2023年8月成立以来,悟通已实现快速成长,获得多项机器人、医疗行业荣誉,客户覆盖机器人标杆企业、新能源国央企、车企、医械上市公司以及科研院所等数十家机构。希望今天的分享能给各位企业家带来新的启发,也期待未来能有机会为大家提供服务。谢谢大家!




