特斯拉近日获批一项新专利,名称十分直接——“车辆悬架执行器系统”。乍看之下,这似乎只是悬架技术的又一次迭代,但深入研读后可以发现,这套方案的设计思路颇具巧思:它并非在主动悬架与被动悬架之间做简单取舍,而是将两者融合,试图在颠簸路面的舒适性与能耗之间找到更聪明的平衡点。
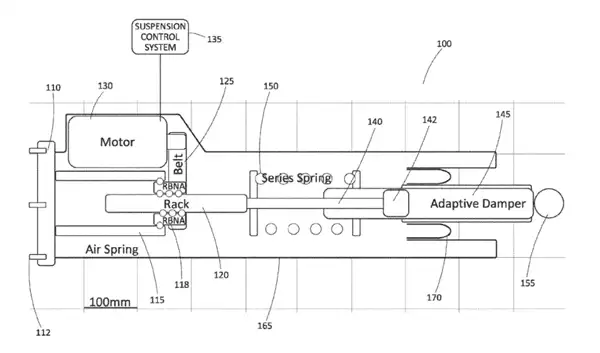
首先来看系统构成。根据专利描述,该悬架由四大核心部件组成:主动执行器、被动弹性元件、自适应减振器,以及并联式空气弹簧。这并非单纯的硬件堆砌,而是各部件分工明确。
工作原理方面,电动机通过驱动传动带,带动滚珠螺母与螺杆机构,实时调节悬架支柱长度——简单来说,就是能主动控制车轮的升降,用于抵消路面起伏。车载加速度计与车轮位置监测器持续采集数据,传输至悬架控制系统,系统快速计算后向电动机发出调整指令。这种闭环控制逻辑在主动悬架领域并不算新鲜,但此专利的亮点在于核心设计:主动执行器旁并联了一个空气弹簧,由空气弹簧承担大部分静态车身重量。这样一来,主动执行器无需持续与重力对抗,可集中精力应对路面的快速变化。
换言之,在日常路面上的细微颠簸,由被动弹性元件与自适应减振器负责处理;而遇到坑洼、减速带等较大起伏时,主动执行器才会介入——在密集连续坑洼路段,它会持续抬升车辆;面对分散的非连续坑洼,则短暂抬升后迅速恢复低阻力状态。这种“按需介入”策略,显然旨在降低不必要的能量消耗,同时延长相关零部件的使用寿命。
从驾乘体验角度看,这套方案带来双重优势:一方面能减轻颠簸造成的不适感,并抑制高频路噪;另一方面,在转弯或加速时,驾驶员可获得更精准的操控反馈。可以说它兼顾了舒适性与操控感——当然,最终效果还需等待量产后的实际调校验证。
值得关注的还有另一项专利。特斯拉此前曾公开过“道路粗糙度地图”(专利号US12594806B2),该地图由车辆传感器收集的数百万个数据点生成。每一辆特斯拉在遇到较大颠簸时,都会上传位置数据与悬架运动数据,这些信息在全系特斯拉之间共享。将新专利与粗糙度地图结合,便能拼出一套相对完整的悬架控制流程:车辆先通过共享地图提前识别前方路况,然后新专利系统迅速调整悬架姿态,主动执行器在碰撞前收回悬架支柱并抬升车轮,剩余冲击力则由并联式空气弹簧与自适应减振器吸收。
这意味着什么?意味着车辆有可能在驶入坑洼路段之前就开始调整悬架,而不是等到车轮压上坑面后再被动响应。这种“预测式”调节,才是这项技术真正的突破点。
当然,目前特斯拉尚未公布该专利的量产时间表,也未说明将率先搭载于哪款车型。专利归专利,距离装车还有多远,只能拭目以待。




