基于Matlab蒙特卡洛法的六自由度机器人工作空间构建
先聊一个核心概念:工作空间。
无论你是刚接触机器人技术,还是已经在进行轨迹规划任务,工作空间都是评估机械臂性能的关键指标之一。简单来说,它指的是机器人末端执行器能够“触及”到的所有位置点的集合。那么,如何高效、直观地将这一空间可视化出来?本文的核心正是介绍一种基于蒙特卡洛随机采样法的实现思路,并在MATLAB环境中将其运行成功。
一、蒙特卡洛法与机器人工作空间概述
分析机械臂工作空间时,行业内常见的方法有三种:几何构建法、解析法和数值计算法。几何法直观易懂,但受关节数量限制较大;解析法推导过程复杂;而传统数值法往往计算量庞大。蒙特卡洛法作为数值法的一个衍生分支,通过随机概率的思想,在算法效率与结果准确性之间找到了一个较为理想的平衡点。
1. 蒙特卡洛法
蒙特卡洛法应用于机械臂工作空间分析时,其核心逻辑并不复杂:
- 每个关节都在其允许的角度范围内正常工作;
- 让所有关节在各自范围内随机遍历取值;
- 将末端位置的所有随机点汇总起来,就构成了近似的工作空间。
这种方法的优势在于,不受关节数量的严格限制,尤其适合处理多自由度、复杂构型的机器人系统。
2. 机器人工作空间
工作空间,通俗理解就是机器人末端执行器在运动过程中所能扫过的总体积。它直接受到机器人几何结构以及每个关节机械限位的约束。
以六自由度机器人为例,每个关节都有不同的角度边界。比如之前文章中建立模型时用到的 qlim 函数,就将6个关节的范围定义得非常明确:
L1.qlim = [(-165/180)*pi, (165/180)*pi];
L2.qlim = [( -95/180)*pi, (70/180)*pi];
L3.qlim = [( -85/180)*pi, (95/180)*pi];
L4.qlim = [(-180/180)*pi, (180/180)*pi];
L5.qlim = [(-115/180)*pi, (115/180)*pi];
L6.qlim = [(-360/180)*pi, (360/180)*pi];
工作空间又细分为可达工作空间和灵活工作空间。前者是机器人末端能够到达的所有位置集合,后者则是能以任意姿态到达的位置集合——显然是前者的子集。本文重点讨论的是更基础的可达工作空间。
二、rand函数的应用
1. rand函数
蒙特卡洛法的随机性,在MATLAB中主要通过 rand() 函数来实现。下面是 rand() 的几种常用语法格式:
| 语法 | 说明 |
|---|---|
| X = rand | 返回一个在区间 (0,1) 内均匀分布的随机数 |
| X = rand(n) | 返回一个 n×n 的随机数矩阵 |
| X = rand(sz1,…,szN) | 返回由随机数组成的 sz1×…×szN 数组 |
| X = rand(sz) | 返回由随机数组成的数组,大小由向量 sz 指定 |
| X = rand(___,typename) | 返回指定数据类型的随机数数组 |
| X = rand(___,‘like’,p) | 返回与 p 同一对象类型的随机数数组 |
| X = rand(s,___) | 从指定随机数流 s 生成数字 |
2. 随机画点
理解了 rand() 的用法之后,下一步就是如何用它生成关节角度范围内的随机值。通用的代码实现非常简单:
thetamin*(pi/180) + (thetamax-thetamin)*(pi/180)*rand;
这句话的含义是:以角度范围的最小值为基准,再加上(最大值与最小值之差范围内的随机数),从而得到当前关节轴的随机角度值。
三、基于蒙特卡洛法采用运动学正解构建工作空间
1. 运动学正解
这里直接给出正解的脚本函数 MODtransmatrix。如果想深入了解正解的推导过程,可以回顾往期相关文章。
function [T06] = MODtransmatrix(theta1,theta2,theta3,theta4,theta5,theta6)
% 连杆偏移
d1 = 398; d2 = -0.299; d3 = 0; d4 = 556.925; d5 = 0; d6 = 165;
% 连杆长度
a1 = 0; a2 = 168.3; a3 = 650.979; a4 = 156.240; a5 = 0; a6 = 0;
% 连杆扭角
alpha1 = 0; alpha2 = pi/2; alpha3 = 0; alpha4 = pi/2; alpha5 = -pi/2; alpha6 = pi/2;
MDH = [theta1 , d1, a1, alpha1;
theta2+pi/2, d2, a2, alpha2;
theta3 , d3, a3, alpha3;
theta4 , d4, a4, alpha4;
theta5 , d5, a5, alpha5;
theta6 , d6, a6, alpha6];
% 各连杆变换矩阵计算
T01 = [cos(MDH(1,1)) -sin(MDH(1,1)) 0 MDH(1,3);
sin(MDH(1,1))*cos(MDH(1,4)) cos(MDH(1,1))*cos(MDH(1,4)) -sin(MDH(1,4)) -sin(MDH(1,4))*MDH(1,2);
sin(MDH(1,1))*sin(MDH(1,4)) cos(MDH(1,1))*sin(MDH(1,4)) cos(MDH(1,4)) cos(MDH(1,4))*MDH(1,2);
0 0 0 1];
% ... 后续的 T12, T23, T34, T45, T56 按相同格式计算 ...
T06 = T01*T12*T23*T34*T45*T56;
end
需要特别留意一点:由于机器人在第二个关节处存在90°的偏移量,因此在代码中 theta2 后面加上了 pi/2 进行补偿。
2. 构建工作空间
首先为每个关节设定角度限位,然后利用正解函数计算末端位置,最后通过 plot3() 将这些点绘制出来,工作空间就能一目了然地呈现。
实现代码如下:
theta1min = -165; theta1max = 165;
theta2min = -95 ; theta2max = 70 ;
theta3min = -85 ; theta3max = 95 ;
theta4min = -180; theta4max = 180;
theta5min = -115; theta5max = 115;
theta6min = -360; theta6max = 360;
n = 30000;
x = zeros; y = zeros; z = zeros;
for i = 1:n
theta1 = theta1min*(pi/180) + (theta1max-theta1min)*(pi/180)*rand;
theta2 = theta2min*(pi/180) + (theta2max-theta2min)*(pi/180)*rand;
theta3 = theta3min*(pi/180) + (theta3max-theta3min)*(pi/180)*rand;
theta4 = theta4min*(pi/180) + (theta4max-theta4min)*(pi/180)*rand;
theta5 = theta5min*(pi/180) + (theta5max-theta5min)*(pi/180)*rand;
theta6 = theta6min*(pi/180) + (theta6max-theta6min)*(pi/180)*rand;
Tws = MODtransmatrix(theta1,theta2,theta3,theta4,theta5,theta6);
x(i) = Tws(1,4);
y(i) = Tws(2,4);
z(i) = Tws(3,4);
end
figure('color',[1 1 1]);
plot3(x,y,z,'b.','MarkerSize',0.5)
hold on
xlabel('x轴(millimeter)','color','k','fontsize',15);
ylabel('y轴(millimeter)','color','k','fontsize',15);
zlabel('z轴(millimeter)','color','k','fontsize',15);
grid on
3. 代码运行结果
效果如下图所示:
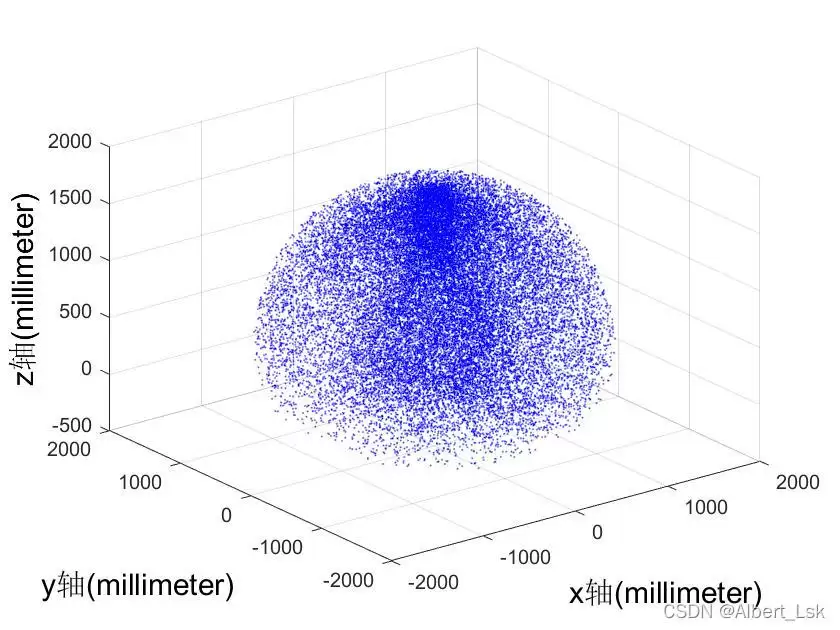
从结果可以看出,随机采样点密集地覆盖了机器人末端所能到达的区域,工作空间的轮廓非常清晰。
总结
本文的核心在于介绍如何在MATLAB环境下,通过蒙特卡洛随机采样方法,让每个关节在其角度范围内进行大量随机取值,再借助正运动学求解得到末端位置,最终将这些点绘制出来,形成机器人工作空间的直观可视化。该方法不仅实现过程简单、成本较低,而且非常适用于机器人初期设计或方案验证阶段。
参考资料
- 蒙特卡洛法之MATLAB实现
- 蒙特卡罗法
- 蒙特卡罗算法是什么?
- 机械臂——六轴机械臂操作空间运动分析
- 机器人工作空间可视化(蒙特卡罗法)
- 基于蒙特卡洛法的七自由度拟人机械臂工作空间分析




