想要让机器人真正掌握复杂的高级操作能力,模仿学习是一种不可或缺的方法,而这一过程的核心在于获得高质量的遥操作演示数据。然而,当前市场上的移动操作系统存在诸多不足:控制与运动常常分离,人机协作不够流畅,面对长时间跨度的任务时推理能力明显不足。这些缺陷严重限制了机器人在真实场景中的应用潜力。
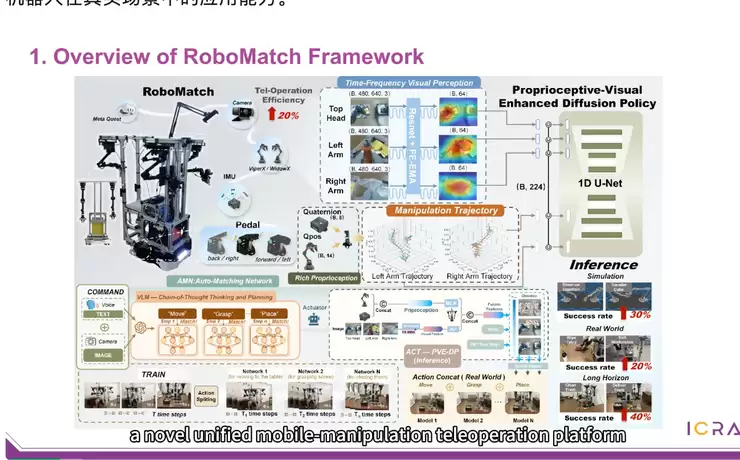
核心创新一:RoboMatch 一体化遥操作平台
该平台的设计颇具巧思,相当于为机器人配备了一个智能“驾驶舱”。它集成了VR头显、主从机械臂以及脚踏板,使操作者能够同时控制移动底盘和双臂,实现协同运动。操作过程中,多视角视觉反馈与运动映射带来沉浸式体验,显著提升了数据采集的效率和直观性。硬件配置方面,平台采用7自由度从臂(ViperX-300)、差分驱动移动底盘、末端IMU以及主臂(WidowX-250),整体操作手感高度拟人化。
核心创新二:感知增强扩散策略(PVE-DP)
该创新专注于解决“精准感知与精细识别”的挑战。研究团队提出了FE-EMA模块,通过融合空间与频域的视觉特征——利用离散小波变换提取多尺度特征,从而获得更立体的视野。此外,末端IMU采集的四元数数据与关节角度信息进行融合,进一步提升了姿态感知的精度。在从仿真到真实任务的测试中,无论是物体插拔还是桌面清洁等精细操作,其成功率普遍提高了20%至30%。
核心创新三:自动匹配网络(AMN)架构
如果说前两项创新分别强化了“感知”与“操控”能力,那么AMN架构则充当了“任务大脑”的角色。该架构基于视觉-语言模型(GLM-4.1V)进行链式思考推理,能够将复杂的长时程任务像切蛋糕一样分解为一系列逻辑清晰的子任务。当每个子任务到来时,系统自动匹配最合适的预训练专用策略网络来执行,从而有效抑制了误差累积的问题。实际效果显著:在“清理垃圾”或“递送工具”等多步骤任务中,成功率相比基线方法提升了约40%。
实验验证
研究团队在MuJoCo仿真环境以及真实机器人平台上开展了一系列系统性的测试。测试重点聚焦于三个方面:AMN架构在3000至4000步长任务中的稳定性、PVE-DP在精细操作维度上的表现,以及RoboMatch平台的数据采集效率——相较于分离式操作平台,其效率提升了20%以上。
总体而言,RoboMatch在操作精度、任务成功率以及长时程推理稳定性方面均展现出令人信服的表现。这项研究成果已于2026年1月31日被ICRA 2026正式接收。ICRA由IEEE机器人与自动化协会主办,是机器人领域规模最大、影响力最为广泛的旗舰会议。该论文的第一作者为江南大学机械工程学院硕士研究生刘涵裕,指导教师为宋智功教授。




