在机器人科研与教育领域,“价格亲民、易于使用、可持续迭代”的人形开发平台,长期以来一直是一个亟待填补的空白。
针对这一缺口,高擎动力在ICRA 2026大会上推出了全新产品——Mini Pi plus。这款机型以15公斤的轻量化机身、完整的开源生态,以及覆盖仿真到真机的全栈工具链,试图彻底改变当前的局面。
01. 人形科研平台的“不可能三角”
近两年,人形机器人产业化趋势加速,但科研端的实际体验却并不乐观。高校实验室、研究机构以及机器人竞赛团队在挑选开发平台时,往往陷入一个“不可能三角”的困境:高性能、低成本、易用安全这三项核心需求,极少能同时满足。
放眼市面上的主流产品,要么是身高接近一米、重量近30公斤的重型设备,搬运需要两人协作,一次磕碰的维修费用高昂,实验室安全审批流程繁琐;要么是轻量级玩具,电机扭矩不足,URDF模型与实体机器人差异巨大,仿真运行顺利,部署到真机却频繁失败,研究价值十分有限。
更隐蔽的痛点集中在软件生态上。多数厂商仅提供SDK和ROS接口后便不再更新,最多给出API列表,缺乏完整的从零开始上手指南、强化学习基线、Sim2Real部署教程以及真实任务示例。结果,研发团队的大量精力消耗在环境搭建和问题排查上,难以集中精力进行算法创新。
这次高擎动力在ICRA 2026上发布Mini Pi plus,正是为了打破这种僵局——通过一台轻巧、高性能且软件生态完全开源的小型人形机器人,降低科研平台的价格门槛与技术黑箱。

02. 轻量化非妥协,而是一种设计理念
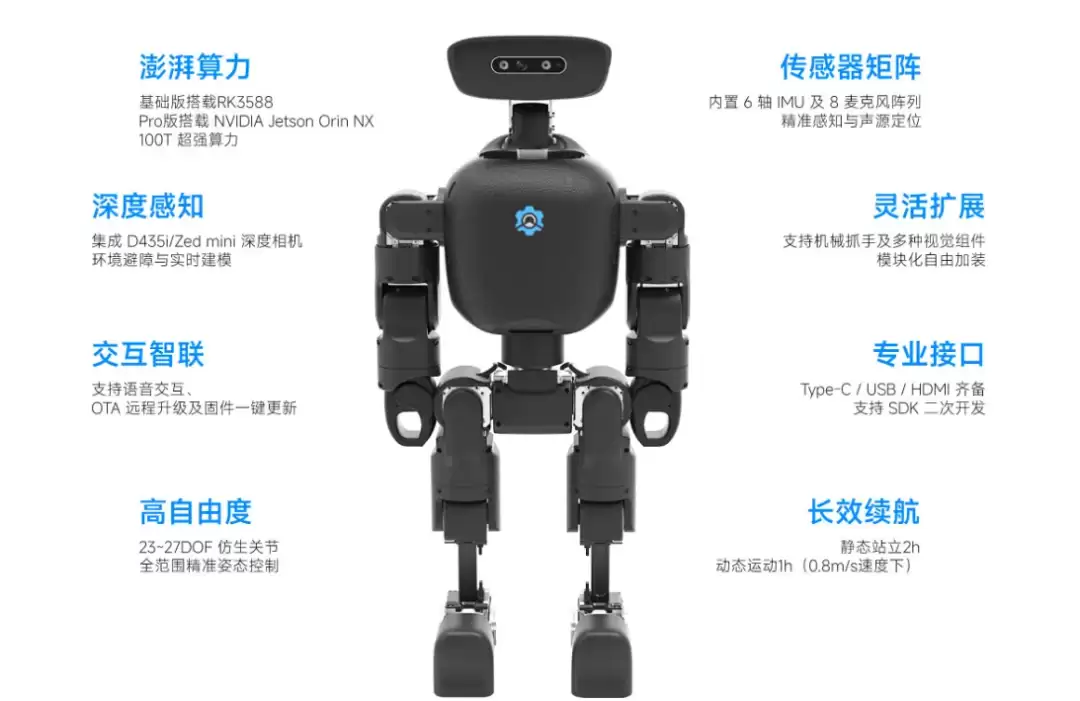
从参数看,Mini Pi plus给人的第一印象就是“轻盈”。整机高度65.6厘米,体重大幅控制在15公斤,相比主流平台常见的95至123厘米高度、19.5至29公斤重量,尺寸和重量均有明显优势。
这个尺寸并非随意设定,而是经过严谨的科研适配考量。65.6厘米的高度在共享实验室中安全性极高,无需物理围栏,单人即可轻松移动。即使在强化学习训练中反复跌倒,低冲击动能也能显著降低硬件损坏风险与维修频率,真正实现“高频试错”。
轻量化并未牺牲性能。Mini Pi plus峰值扭矩达到21Nm,全身配备23或27个自由度(DOF),能够完成行走、奔跑甚至后空翻等动作。其质量-扭矩比接近1:1,在小体积内实现了全尺寸人形机器人的动力学表现。单次充电可运行1至2小时,足以覆盖完整的实验流程。
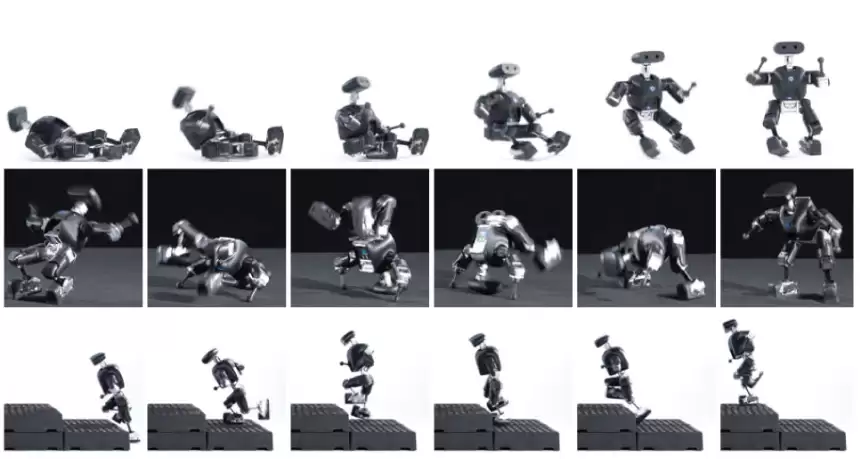
据可靠消息,Mini Pi plus已在Project Instinct项目中完成真机验证,后空翻、复杂地形自主穿越、跌倒后自主爬起等高难度动作均能稳定执行。这些以往仅出现在大型双足平台上的能力,如今全部集成在15公斤的小巧机身中。
技术上的真正突破体现在通信架构上。Mini Pi plus全身关节采用CAN-FD总线通信,电机控制环频率高达30kHz,实时驱动环达1kHz,配合PD控制与前馈力矩补偿,高频控制指令可以流畅下发,完全消除了传统串行总线的瓶颈。对于研究全身控制、模型预测控制或深度强化学习的团队而言,这种底层实时能力是验证先进算法不可或缺的前提条件。
03. 从源头缩小Sim2Real差距
机器人大脑模型的研究目前备受关注,但Sim2Real的鸿沟一直是腿足机器人领域的“隐形障碍”。
许多研究团队深有体会:在Isaac Gym或MuJoCo中训练良好的策略,部署到真机后却步履蹒跚。原因往往不在于算法本身,而是URDF模型与真实硬件之间存在系统性偏差——电机惯量、摩擦参数、减速器非线性等细节在厂商提供的模型中常被简化或忽略。
Mini Pi plus的解决思路是从源头对齐。高擎动力公开了出厂校准后的完整URDF模型,电机参数、关节限位、惯量信息全部精准写入模型,使仿真与真机的动力学特性高度一致。

与此同时,团队提供了包含域随机化、系统辨识和特权信息蒸馏在内的完整Sim2Real流水线,兼容IsaacLab、MuJoCo和Gym等主流仿真器。这意味着研究者可以集中精力进行策略设计,无需花费数周时间去手动“调gap”。

04. 从ROS上下到全栈工具链,生态全面开源
硬件参数决定了平台的下限,而软件生态则决定了科研的上限。
Mini Pi plus的开源策略并非仅仅挂出一个GitHub链接,而是构建了一套分层、全覆盖的开发体系。
底层(ROS以下)包含Python/C++ SDK及ROS 1/2双栈支持,提供从高层脚本到底层实时控制的完整API。7通道CAN-FD拓扑、统一的URDF/TF/RViz/相机/ONNX全链路,研究者可以轻松集成自己的感知与控制模块,无需逆向工程。
上层(ROS以上)则搭载了开箱即用的全栈工具链。其中包括行走、奔跑、后空翻等Locomotion基线;配备机载深度感知与自适应视角控制的Perceptive Locomotion(已在0.3米高台滚翻、楼梯、坡道、间隙等复杂地形上完成真机验证);下半身行走与上半身操作策略同步运行的Loco-manipulation示例;以及完整的Sim2Real部署指南。
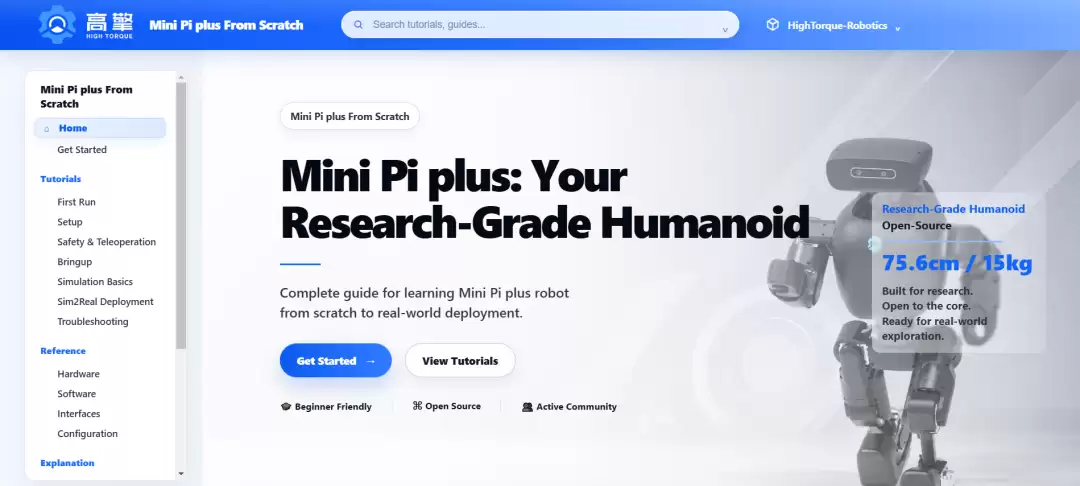
尤其值得一提的是其“From Scratch Doc”文档体系。与常见的仅列API清单的文档不同,Mini Pi plus提供了一条从First Run到Setup、Simulation Basics,再到Sim2Real Deployment的完整学习路径,并采用Tutorials、Reference、Explanation三层结构,让新加入的研究生或工程师能够独立上手。GitHub社区持续更新,Changelogs和Releases公开可查——这种对标工业级软件的文档规范,在人形科研平台中并不多见。

05. 从一台机器人到一个生态
从技术文档来看,高擎动力对Mini Pi plus的定位并不只是一台机器人,而是一套可扩展的基础设施。
其模块化主控盒子能够连接整个产品矩阵,从双足到四足,从机械臂到全人形,同一套代码库可在多个平台上复用。例如,上半身的Manipulation策略接口完全开放,研究者可以自由集成VLA模型、人机交互策略或神经科学接口。

据悉,Mini Pi plus已进入ETH Zurich、UC Berkeley、香港大学等全球顶尖实验室,应用于运动控制、全身控制、VLA和神经科学交叉研究。清华大学、浙江大学、汉堡大学、华中科技大学等多支RoboCup战队也选用Mini Pi plus pro作为参赛平台。其中浙大ZJU-Dancer战队还在German Open 2026上夺得Small Size组别冠军。香港科技大学(广州)和成均馆大学则持续在人机交互方向推进研究。

产业方面,已有从学术到产业的数家初创公司和影视行业头部企业完成了规模化合作落地。这个小尺寸人形平台,正在逐步验证其生态承载力。
06. 轻量化与开源化:人形科研平台的两大趋势
Mini Pi plus的发布,折射出人形机器人科研工具市场正在发生的两个重要转向。
第一个转向是轻量化优先。过去行业追逐“更大、更强、更像人”,但科研场景的真实需求是“安全、高频、低成本迭代”。15至20公斤的重量区间正成为新的黄金标准——它既能承载全尺寸动力学性能,又能大幅降低使用门槛。可以预见,更多厂商将跟进这种半人形或小人形形态。
第二个转向是生态制胜。随着产业链逐步完善,硬件参数将趋于同质化,真正的差异化体现在软件栈的完整度与可复现性上。一份清晰的Sim2Real指南、一套可运行的RL基线、一个活跃的社区——这些软性基础设施正成为研究者选择平台的关键决策因素。高擎动力将完整的URDF、SDK、仿真接口和示例策略全部公开,实际上是在为整个具身智能社区奠定基础。
当然,挑战依然存在。目前,轻量化机身受材料特性限制,在上半身操作任务中的负载能力、复杂动态动作下的散热与耐久性,以及社区生态的长期维护,都需要持续验证。但至少,Mini Pi plus提供了一个难得的起点——一个研究者真正敢于放手去跑、去摔、去改的开源平台。




