在机器人灵巧手的研究中,长期困扰工程师的一大难题是:当机械手试图抓取并操作细小物体时,手指间的相互触碰会生成大量触觉信号,这类“自我干扰”往往会淹没来自外部物体的真实触感。人类却能自然而然地忽略自己手指的碰撞——这一被称为“感觉衰减”的本能机制,让我们的抓握动作精准而从容。那么,能否让机器人也学会这种自我干扰抑制能力呢?
早稻田大学菅野重树、尾形哲也团队的这项研究,正是从这一角度切入。他们提出的TaSA框架(触觉感觉衰减,双阶段深度预测学习),使机器人多指灵巧手在操作时能够主动过滤自我触碰带来的干扰,将注意力聚焦于外部物体。相关研究论文已被ICRA 2026收录。
核心亮点速览
引入人类“感觉衰减”机制:人类抓握时能本能地忽略手指间的相互触碰,而机器人手指碰撞产生的信号往往淹没外部物体触感。TaSA首次在深度预测学习中引入了这一生物机制。
解锁高难度精细操作:该框架赋予机械手极高的触觉辨识力,使其能够在大量自我触碰干扰下,成功完成自动铅笔芯插入笔筒、硬币投币、回形针夹纸等极端精细的操作任务。
创新点详解
双阶段深度预测学习(Two-Phased DPL):第一阶段“自我触碰学习”训练一个全连接网络,仅根据关节位置预测手指间自我触碰产生的触觉反馈;第二阶段“运动学习”利用LSTM结合原始触觉输入和第一阶段预测的自我触碰信号,过滤掉内部干扰,专注于外部物体的交互控制。
触觉特征空间净化:通过将自我预测作为基准进行剥离,算法有效缩小了由手指预紧力带来的“噪声方差”,使得真实物体接触的特征边界更加清晰。PCA主成分分析进一步验证了该方法的有效性。
实验成果
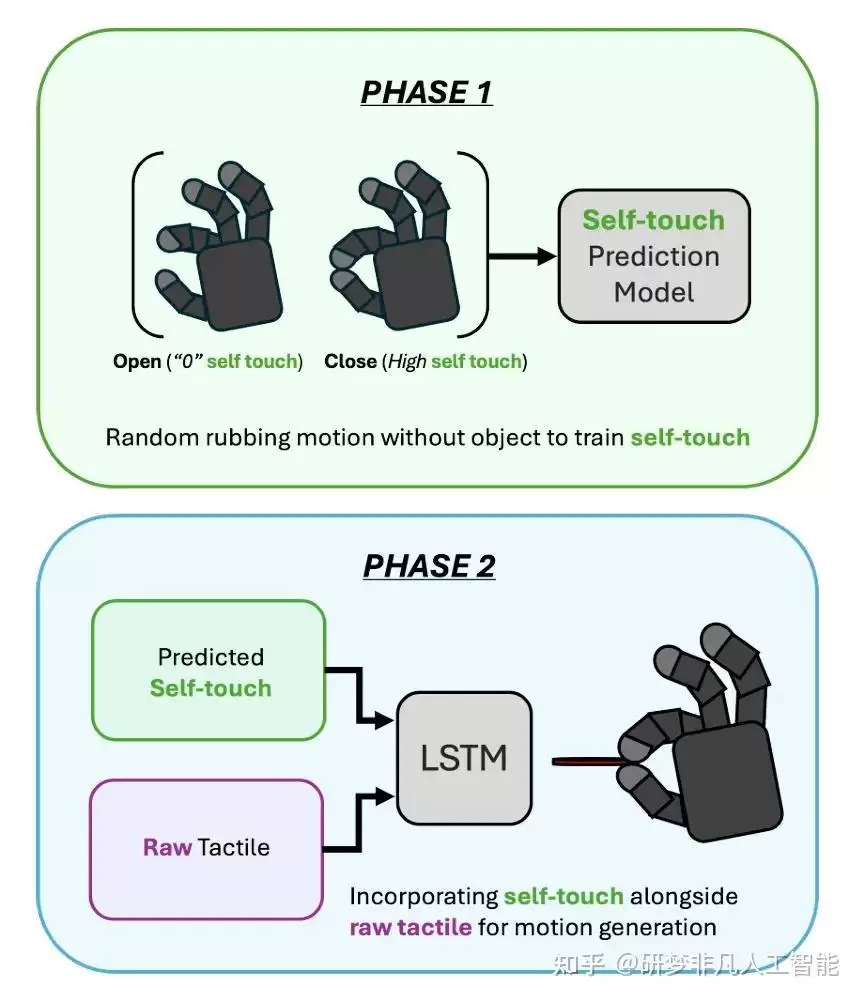
图2:TaSA(触觉感觉衰减)双阶段深度预测学习框架示意图。
```



