ICRA 2026 刚落幕于维也纳。如果用一句话来概括它石智航本次的表现,那就是:不仅是在展台上亮相,更在学术、技术、产品三大维度上展示了硬核成果。其中,灵巧手 DexHand 的全球首秀成为焦点,但更令人印象深刻的,是背后那套从论文到实物、从离线预测到实时控制的全栈能力体系。
在本届 ICRA 上,它石智航联合创始人兼首席科学家丁文超博士带队,共有 9 篇论文被大会接收。更值得关注的是,他们同步发布了一项名为「TacForeSight」的新技术。与其说这是一篇论文的发表,不如说它是它石智航在“手脑一体”技术路线上迈出的关键一步。
TacForeSight:让灵巧手从“被动反馈”进化到“主动预判”
TacForeSight 是本届 ICRA 上它石智航展示的学术重点之一。这项工作延续了此前 OmniVTA 视触觉世界模型的研究,与新加坡国立大学、上海交通大学、中科院自动化所及复旦大学共同协作完成。其核心目标明确:将视触觉世界模型真正应用于实时控制场景。

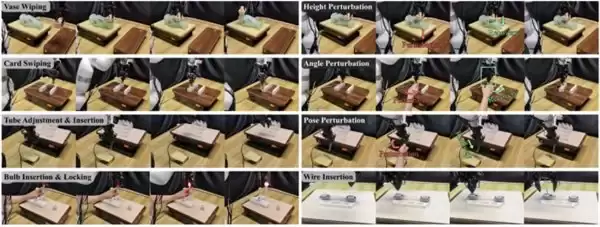
在真实的物理世界里,机器人看到物体并不等同于能操作好。对人类来说几乎不假思索的擦拭、插接、拧紧、抓取等动作,对机器人而言却是巨大的技术难题。每一次接触、滑动、对齐,背后都涉及复杂的物理交互——一旦判断滞后,就会导致打滑、错位甚至任务失败。
TacForeSight 正是为了攻克这一难题而设计。其核心是一个基于力条件的触觉世界模型:利用高频腕部力信号,预测短时间内的未来触觉潜变量,并将这一预测结果作为动作策略的“前瞻性接触先验”。简单来说,机器人不再是“触摸后反应”,而是能够提前预判接触状态的变化,并主动调整动作。
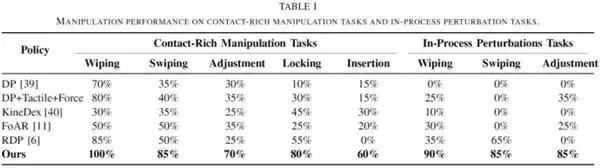
实验数据也展现了扎实的性能。论文结果显示,TacForeSight 在五个标准接触任务上的平均完成率达到 79.0%,明显优于其他基线方法。更值得注意的是其扰动恢复能力:在高扰动任务中达到 90%,角度扰动和姿态扰动任务中同样表现优异,分别拿下 85% 和 85% 的成绩。此外,该系统支持 20Hz 实时推理,能够以接近人类操作的速度完成基于力和触觉的闭环控制。这意味着,触觉世界模型已不再仅是一个离线预测工具,而是真正进入了机器人的高频实时控制闭环。
这项技术已在本次 ICRA 正式亮相的 DexHand 灵巧手上得到应用。其工作流程如下:DexHand 通过 TacForeSight 将腕部力/力矩信号传导至视触觉世界模型 OmniVTA,再依托通用具身大模型 AWE 3.0,使灵巧手不仅能感知接触,还能预测接触变化并提前调整动作。这正是它石智航始终坚持的“手脑一体”思路——灵巧手不仅仅是末端执行硬件,更是连接数据、模型与物理世界的关键接口。
具身领域 9 篇论文入选,学术能力的延续性值得关注
回顾去年的 ICRA 2025,它石智航在 ManiSkill-ViTac 视触觉融合挑战赛中击败全球 42 支队伍,夺得冠军。今年,这种学术上的领先优势得到了延续。由丁文超博士代表的公司及相关合作机构共有 9 篇论文被本届 ICRA 接收,研究范围覆盖了视觉感知、视角鲁棒操作、复杂任务泛化、全身交互控制等具身智能核心环节。
值得注意的是,这些论文并非孤立的技术点,而是共同指向一个系统性的核心问题:如何让机器人在真实的物理世界里——面对视角变化、未知物体、接触扰动以及动态环境——仍然能保持稳定、精确且可泛化的操作能力。正如丁文超在本届 ICRA 行业主题演讲中所指出的:当感知、接触与行动不再彼此割裂时,具身智能的泛化能力才会真正涌现。

从 ICRA 2025 挑战赛夺冠,到 ICRA 2026 论文入选与全栈技术亮相,它石智航在 ICRA 这条线上的持续参与,呈现出一条清晰的发展路径:从学术研究到工程验证的闭环。这背后是高密度研发团队、长期学术积累与真实场景工程探索共同支撑的结果。
根据截至目前的公开信息,它石智航研发人员及硕博占比均超过 80%,985/QS100 背景占比超七成,核心团队累计发表顶会/顶刊论文 40 余篇。这些学术成果并非简单的“贴金”背书,而是数据、模型与本体能力持续增长的坚实基础。
随着 ICRA 2026 在维也纳落下帷幕,它石智航完成了一次从学术成果到现场能力的系统呈现。当机器人开始具备理解、预测并适应物理环境的能力时,具身智能正加速迈向一个“能干活、能预判、能泛化”的全新阶段。




