距离ICRA 2026开幕仅剩最后5天,大会热度已拉满。今天这一期,咱们集中聊三个看点:MIT的SLAM大牛终于官宣Keynote、Salim Azak实验室一人独揽9篇论文,还有14家展商集体预热——其中遥操作这条暗线,尤其值得关注。
先说第一个热门议题。
MIT SLAM大牛Keynote定档,5人阵容基本成型
随着Luca Carlone的Keynote官宣,ICRA 2026的演讲阵容正式定调。这位MIT Spark Lab的负责人,是SLAM与空间AI领域的世界级学者,他的加入补齐了最后一块拼图。目前Keynote阵容已扩至5人:Ken Goldberg Plenary、Yuke Zhu、Kento Kawaharazuka、Tetsunari Inamura,再加上Luca Carlone。距开幕仅5天,此时仍有全新Keynote官宣,信号意义极强——说明大会议程已进入最终定稿阶段,整体节奏正在收尾。
与此同时,Georgia Tech也放出了参展规模的消息:90人以上的团队参展,将成为美国高校中规模最大的参展团之一。这种级别的投入,反映出顶尖高校对ICRA 2026的高度重视,不仅是学术参与,更是硬核亮相。

一人9篇ICRA!自动驾驶/SLAM/无人机多线爆发
另一个值得关注的爆发点来自Salim Azak实验室。这个团队在ICRA上实现了单一实验室的大规模多方向覆盖,一口气展示了9篇论文,覆盖自动驾驶、SLAM和无人机三大方向,密度和广度都相当惊人。
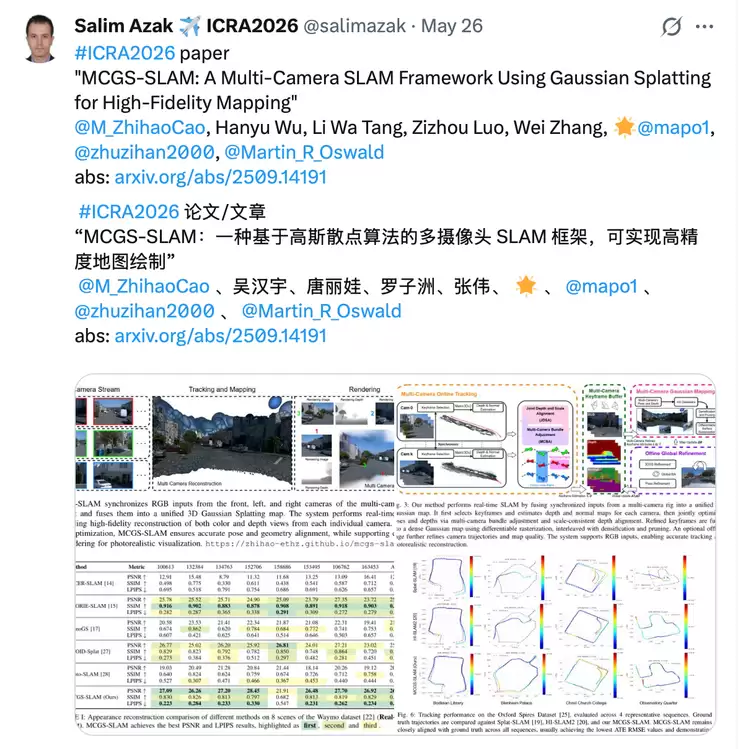
具体来说:在自动驾驶协同方面,他们推出了V2V-GoT和V2V-LLM两篇姊妹论文,前者结合了Graph-of-Thoughts与多模态LLM,后者聚焦V2V协同驾驶+LLM;在多相机SLAM方面,MCGS-SLAM是首个基于Gaussian Splatting的多相机SLAM框架;在无人机感知方面,KAN VO是首个基于KAN的视觉里程计方案,专为行星着陆场景设计,同时DroneKey++提供了新的基准。此外,Salim Azak本人也同期获得了IEEE RA-L Outstanding Associate Editor奖。
这一波操作,基本上是把一个实验室能做的方向全覆盖了一遍,也从一个侧面反映了当前机器人学领域的发展节奏——多点开花,且每个方向都在快速迭代。
14家展商抢发!遥操作赛道成ICRA暗线
展商预热潮往往是大会议题的晴雨表。本期14家展商集中官宣,创下了近10期的新高。值得注意的是,遥操作赛道在这波预热中尤为密集——四家展商同时聚焦远程/遥操作领域:LUMOS Robotics(Booth #202+WBCD赞助+UMI数据支持遥操)、RealMan Robotics(全球遥操网络VIECON)、MANUS(Booth #115触觉手套遥操)、Flexiv(modular+触觉感应新品预告)。这个密度,已经不只是巧合了,更像是ICRA 2026在硬件与系统层面有意布局的一条重要技术主线。
除此之外,硬件创新也值得关注:Wuji Hand 2灵巧手(Booth #121)、GENISOM M1 Ultra(BEV+OCC四足导航)、Touchlab触觉传感(Booth #188)等产品,各有看点。从展商阵容来看,今年的ICRA不仅有学术层面的硬核论文,还有大量真实可感的硬件系统落地,值得期待。




