地平线机器人实验室近日重磅开源了其最新研发成果——HoloMotion-1。这是一个专为仿人机器人全身运动控制而设计的“小脑”大模型,其参数量级达到了4亿,在人形机器人控制领域树立了新的标杆。
这一突破意味着什么?以往业界常见的机器人运动控制模型,参数量大多停留在百万或千万级别。HoloMotion-1的出现,直接将模型规模提升了一个数量级。更重要的是,它并非一个只能部署在云端、依赖强大算力的庞然大物。凭借其精巧的架构设计,该模型能够在机器人本体(即端侧)实现高达每秒300帧的实时推理速度。这一频率远超机器人运动控制通常所需的50Hz基准,为实时、流畅、高响应的动作执行奠定了坚实基础。
如此卓越性能的背后,源于其高质量、多元化的海量训练数据。HoloMotion-1的数据来源极为广泛:不仅包含了从互联网公开视频中提取并重建的人类动作序列,也整合了专业实验室的高精度光学动作捕捉数据。此外,通过VR虚拟现实设备与惯性动作捕捉系统采集的遥操作数据,也被纳入训练体系。所有这些异构数据都经过一套标准化的处理流程,被高效“翻译”成机器人关节可直接理解与执行的运动指令。
那么,在实际的机器人部署与测试中,这个强大的“小脑”表现究竟如何?实验结果表明,HoloMotion-1展现出卓越的零样本泛化与迁移能力,能够驱动机器人完成多种高难度、高动态的复杂动作任务:
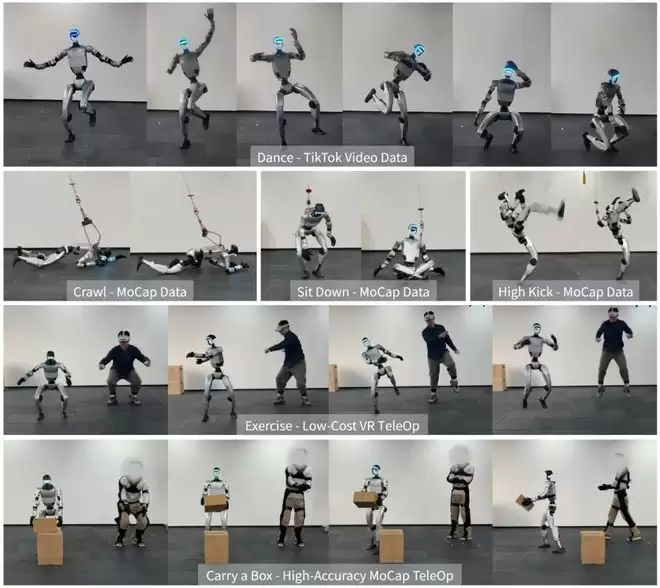
例如,模仿从网络视频中学到的高动态舞蹈动作;执行基于光学动捕数据的爬行、坐下、高踢腿等多接触点动作;复现通过低成本VR设备学习的标准健身动作;以及完成利用惯性动捕设备训练的人机协作任务,如搬运箱子等。
这些演示并非孤立的技能展示,它们系统性地覆盖了人形机器人全身运动控制中的核心挑战:包括大幅度的全身协调运动、低姿态下的稳定性控制、与环境存在频繁物理接触的复杂动作、动态过程中的平衡保持,以及对遥操作指令的实时精准跟踪与复现。HoloMotion-1在这些关键难点上的优异表现,标志着机器人全身运动控制技术正向更智能、更通用、更灵活自主的新阶段迈出了坚实一步。




