人大与OPPO突破图像检索:DeepImageSearch实现主动上下文推理
DeepImageSearch 这项研究,标志着图像检索领域一次重要的范式升级。它不再满足于单张图像的语义匹配,而是直面我们每个人在翻看相册、寻找记忆时的真实场景,提出了一个全新的方向:「主动探索」与「多步上下文推理」。

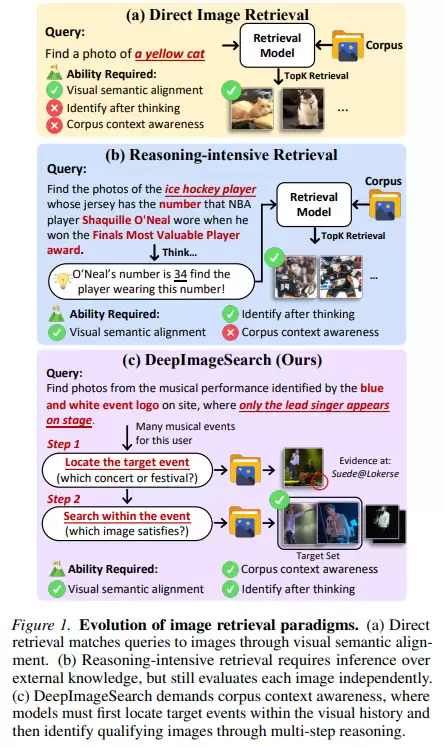
现有的图像检索系统,无论是传统的语义匹配方法,还是近期兴起的推理密集型方法,都存在一个根本性的局限:它们都基于「独立实例匹配」的范式。简单来说,系统判断一张图是否符合搜索需求时,只看这张图本身,完全忽略了图像之间可能存在的依赖关系。
但现实情况恰恰相反。当我们想从海量照片中找到特定记忆时,关键线索往往散落在不同时间、不同场景的照片里。比如,你想找一张“只有主唱出现在舞台上的音乐会照片”。单凭这个描述,很难从一堆演唱会照片里精准定位。更自然的思路是,先找到带有“蓝白相间活动标志”的照片,确定是哪场演出,然后再从这场演出的照片中筛选出目标。
这类需求直接暴露了传统检索的三大短板:
- 无法进行跨图像的关联推理,目标的可识别性高度依赖其他图像的上下文。
- 模型只能被动匹配查询,不会主动规划搜索路径。
- 完全忽视了照片中蕴含的时间、地理位置等时空结构信息。
这不禁让人联想到日常在手机相册里搜图的体验——即便输入了具体描述,系统往往也只能做基础的语义匹配,完全不懂“先找标志、再筛歌手”这种人类本能的搜索逻辑。而来自中国人民大学与OPPO研究院的DeepImageSearch工作,正是从理论层面将图像检索推向了真实的视觉记忆检索场景,为下一代技术指明了一条新路径。
01、核心要义:从“匹配”到“探索”
如果用一句话概括,DeepImageSearch 是让AI学会“像人类翻相册一样找照片”。它不再是输入关键词后直接匹配,而是像侦探一样,主动搜寻线索、串联跨图像的证据、通过逐步推理最终锁定目标。
1. 新范式:从“单点匹配”到“上下文探索”
传统图像检索(例如CLIP、Google搜图)的核心假设是:判断一张图是否符合需求,只看这张图本身就够了。但真实场景往往相反——你想找“演唱会后聚餐的照片”,聚餐场景本身可能平平无奇,得先找到“演唱会门票”那张图来确定时间和地点,才能锁定目标。
DeepImageSearch彻底碘伏了这一范式,将检索重新定义为在视觉历史中的智能体探索任务:
- 先定位,再筛选:先通过线索找到正确的事件(如蓝白标志的音乐会),再从中筛选目标(只有主唱登台的照片)。
- 跨图像推理:证据(标志)和目标(歌手)出现在不同图像中,必须主动串联。
- 长程自主规划:在数万张时间跨度数年的照片流中,自主决定搜什么、怎么看、下一步去哪。
这不再是“一次性语义匹配”,而是“多步上下文依赖的推理过程”。
2. 新框架:ImageSeeker——专为视觉历史探索打造的智能体基线
为了支撑这一全新任务,研究团队设计了ImageSeeker框架,它配备了三大核心组件来应对挑战:
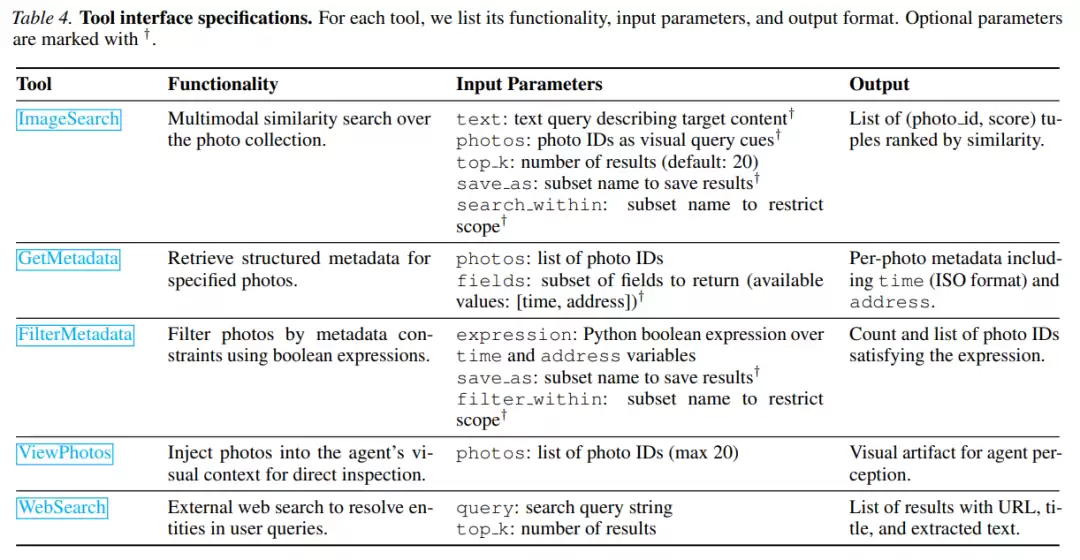
专用工具链:包含ImageSearch(图像检索)、GetMetadata(获取元数据)、FilterMetadata(过滤元数据)、ViewPhotos(视觉核验)、WebSearch(外部搜索)五种工具。这些工具可以组合使用,例如先通过FilterMetadata锁定“2024年8月巴黎”的照片子集,再在该子集内用ImageSearch寻找“埃菲尔铁塔夜景”,实现推理的逐步收敛。
双记忆系统:为了解决长步骤推理容易丢失状态的问题,框架设计了两套记忆: - 显式状态记忆:将中间检索或过滤结果保存为命名的照片子集(如“候选音乐会”、“待验证海滩照”),支持子集内的二次检索、交集运算等。 - 压缩上下文记忆:当交互历史接近模型上下文长度上限时,自动将历史压缩为“会话记忆”(记录全局目标和关键发现)和“工作记忆”(记录当前子任务和下一步计划),确保数十步的推理不丢失状态。
结构化规划:将复杂查询强制拆解为“情境→情境拆解→目标”三层逻辑,指导智能体系统化地分析查询中的隐含约束,避免特征混淆。
3. 新基准:DISBench——首个“无法直接搜到答案”的检索评测
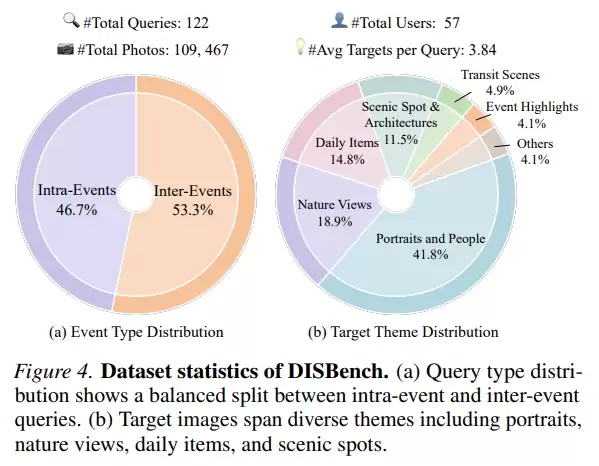
现有的图像检索基准,测试的大多是“关键词→相似图片”的简单匹配。而DISBench是首个面向上下文感知检索的大规模基准,它包含122条真实的高难度查询,覆盖109,467张照片,平均时间跨度达3.4年。其核心设计在于:每条查询都必须通过多步推理才能解决——单看目标图像本身无法区分,必须借助其他照片的时间、地点、人物关联才能确认。
02、研究背景:为何需要范式升级?
图像检索作为信息获取的核心能力,随着视觉-语言模型的发展,已从基础的视觉-文本对齐演进到多模态基础架构。当前的范式大致可分为两类:
- 直接图像检索:仅依靠视觉语义对齐完成匹配,无需推理。
- 推理密集型检索:需要结合外部知识进行推理,但仍独立评估单张图像的相关性。
尽管评估范围已拓展到复杂组合理解、时序视频检索等,但绝大多数基准仍在孤立地评估查询和图像的相关性,完全无视数据内部的结构化关联。另一方面,多模态智能体基准虽然覆盖了网页搜索、GUI操作等多种场景,却始终没有探索天生需要智能体推理的图像检索任务。
这就形成了一个关键空白:真实的个人视觉历史检索,需要模型主动探索时序图像流、串联分散线索、完成上下文推理,而现有体系完全无法满足这一需求。DeepImageSearch正是为填补这一空白而生。
03、ImageSeeker框架详解
ImageSeeker是一个简洁高效的基线智能体框架,旨在解决上下文感知图像检索的两大核心挑战:一是需要协同语义检索、元数据推理、视觉验证来完成探索;二是长步骤推理容易超出模型的上下文限制。
面向视觉历史导航的工具
探索视觉历史需要三项核心能力:从大规模照片库中检索相关内容、利用元数据实现精准约束、执行细粒度视觉验证。为此,框架配备了5类协同工作的工具:
- ImageSearch:支持文本、图像或混合查询,返回语义相似的照片,并可保存结果为子集。
- GetMetadata:读取照片的时间、地理位置等元数据。
- FilterMetadata:按时间或空间约束筛选照片。
- ViewPhotos:直接注入照片供智能体进行视觉核验。
- WebSearch:补充查询中涉及的外部实体知识。
单一工具无法完成复杂查询,所有工具都支持对子集进行迭代操作,使智能体能够一步步缩小搜索范围,完成多步推理。
双记忆机制
为了避免长步骤推理丢失状态,框架设计了两套互补的记忆系统:
- 显式状态记忆:基于照片子集实现。智能体可将检索或过滤结果保存为命名变量,这些子集在后续推理步骤中持续有效,支持子集内检索、交集等操作,帮助逐步缩小候选范围。
- 压缩上下文记忆:当交互历史达到长度阈值时,系统会将历史信息压缩为两部分——会话记忆保留全局目标与关键发现,工作记忆记录当前子目标与计划,从而在有限的上下文窗口内同时维持全局方向和局部推理状态。
规划与推理行为
ImageSeeker的规划与推理能力由结构化的系统提示词驱动。提示词包含查询理解框架与核心行为准则。
- 查询理解框架:将每个查询拆解为三个组件:情境(查询隐含的时空上下文)、情境拆解(将情境分解为逐步逻辑路径)、目标(需返回的具体照片及视觉、元数据约束)。该框架将情境推理与目标识别分离,避免特征混淆。
- 核心行为准则:包括锚点与目标分离、正确解读时间短语约束、自主推断执行、固定格式输出结果等,保障智能体推理的规范性与准确性。
在执行层面,智能体采用迭代式假设验证的推理流程,依次完成锚点发现、情境落地、子目标分解、渐进式收敛、最终验证五个阶段,结合记忆机制完成长程复杂查询的推理。
04、DISBench基准数据集
DISBench是首个面向上下文感知图像检索任务的大规模基准数据集。
任务定义
DeepImageSearch被定义为上下文感知集合检索任务:给定按时间排序的用户视觉历史照片集,模型需要结合自然语言查询,输出所有满足条件的图像。关键在于,单张图像是否相关,依赖于整个语料库的上下文,而非其自身特征。
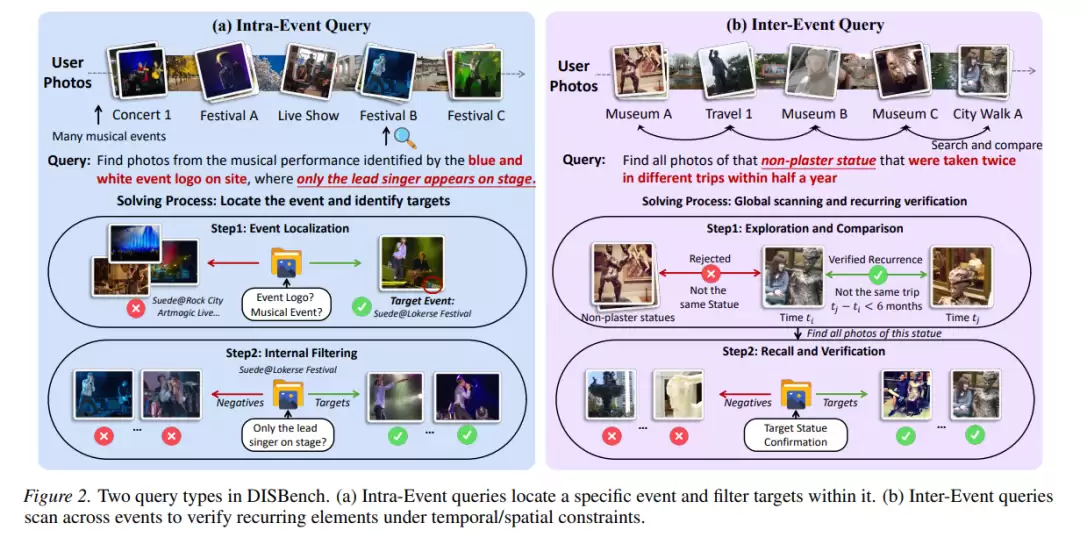
两种核心查询类型
- 事件内查询:先定位特定事件,再在事件内筛选目标(例如,先找到有蓝白标志的演唱会,再从中找出仅主唱登台的照片)。
- 事件间查询:跨多个事件,寻找满足时空约束的重复元素(例如,找出半年内不同旅行中拍到的同一座非石膏雕像)。
数据集构建
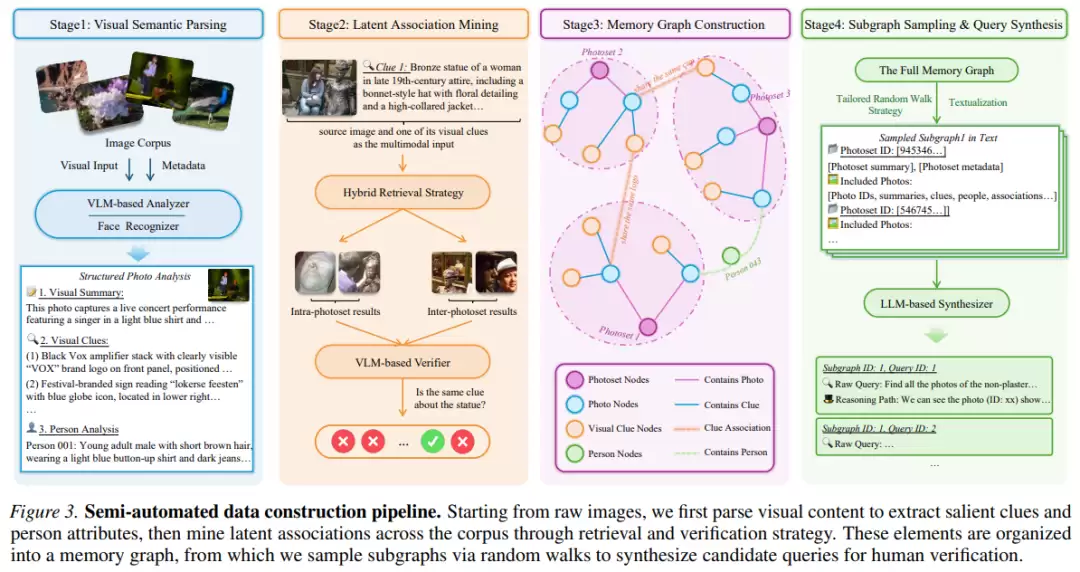
DISBench基于YFCC100M数据集构建,采用人-模型协作流水线完成,分为四个核心阶段:
- 视觉语义解析:用视觉-语言模型提取图像视觉线索,并通过人脸检测聚类追踪重复人物。
- 潜在关联挖掘:通过检索-验证流水线挖掘跨图像的时空关联,过滤假阳性结果。
- 记忆图构建:构建包含照片、照片集、视觉线索、人物四类节点的异构记忆图,刻画视觉历史的碎片化关联。
- 子图采样与查询合成:采样局部子图生成候选查询,确保目标具备视觉模糊性,必须依赖上下文推理才能识别。
人工验证与统计
数据集经过严格的人工质量筛选、全覆盖目标标注、语言优化与交叉验证,最终从2000条候选查询中保留122条,留存率6.1%,标注一致性IoU达0.91。
数据集核心统计:
- 覆盖57位用户,总计109,467张图像,用户视觉历史平均时长3.4年。
- 事件内查询占比46.7%,事件间查询占比53.3%。
- 每条查询平均对应3.84张目标图像,目标覆盖人像、自然景观、日常物品等多元主题。
05、实验结果与分析
实验分为智能体评测与检索评测两类:智能体评测基于ImageSeeker框架,测试了GPT-4o、Gemini 3系列、Claude 4.5系列等闭源模型,以及Qwen3-VL、GLM-4.6V等开源模型,以EM(精确匹配)、F1为指标;检索评测则测试了Qwen3-VL-Embedding、Seed-1.6-Embedding等传统嵌入模型,以MAP@k、Recall@k、NDCG@k为指标。
整体表现
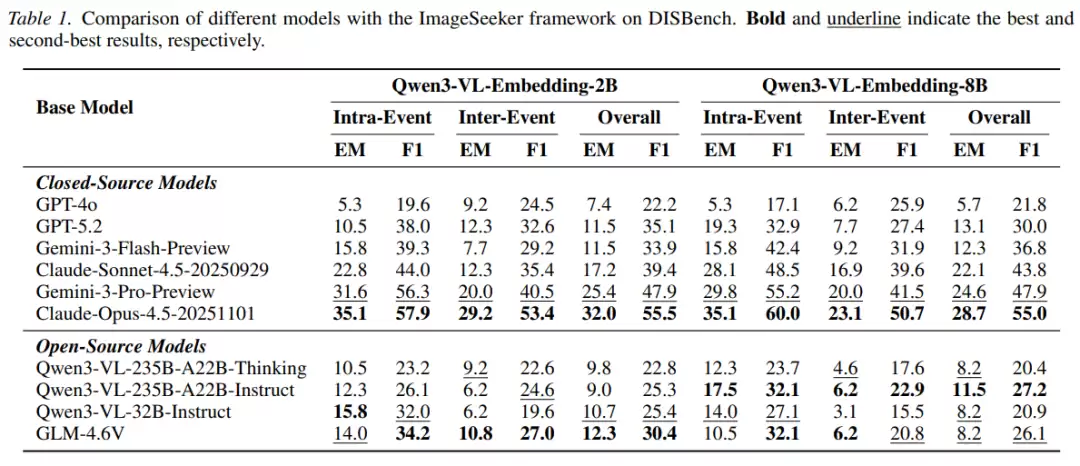
在ImageSeeker框架上的评测结果显示:
- 最优模型Claude-Opus-4.5的F1为55.0,EM为28.7,这表明即使当前顶尖的多模态模型,要完成语料级的上下文推理仍然非常困难。
- 事件间查询的难度显著高于事件内查询,长程跨事件关联是核心性能瓶颈。
- 嵌入模型从2B参数升级到8B参数,性能波动不定,这说明检索质量本身并非核心瓶颈。任务的核心挑战在于对检索结果的多步推理与上下文理解。
直接检索的局限性
为了验证传统检索范式在DISBench上的天花板,团队测试了代表性的视觉-语言嵌入模型。结果显示,所有模型表现极差,Recall@3仅10-14%,NDCG@5仅13-17%。
这一结果并非偶然。DISBench的设计初衷就是让“孤立匹配”失效——查询中的目标图像往往视觉特征模糊,与大量干扰项外观相似。嵌入模型只能基于表面语义进行检索,无法判断哪张“海滩照片”是“烟花表演两天后拍的”、哪张“演唱会照片”满足“只有主唱登台”。即使检索到语义相似的候选,模型也没有机制去区分符合上下文约束的真正目标。
这揭示了一个范式级的根本局限:更强的嵌入模型或许能更有效地检索视觉相似的图像,但无法解决“需要跨图像关联才能判定相关性”的上下文依赖问题。DISBench需要的能力不是“搜得更准”,而是“想得更深”——即多步推理与语料级的上下文理解。

测试时扩增
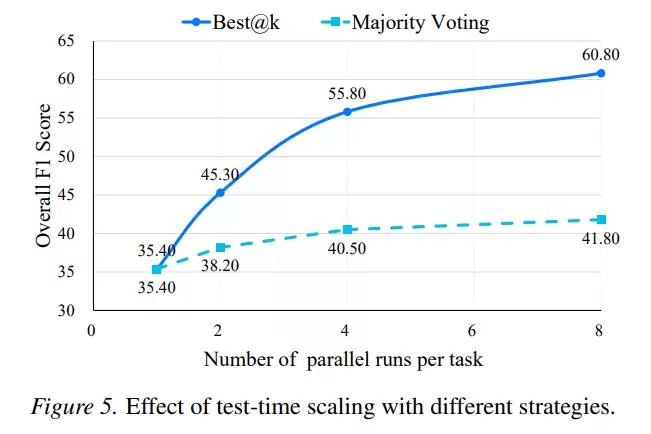
由于智能体探索涉及随机决策,不同推理路径可能导致不同结果。团队测试了并行运行N个实例的测试时扩增策略:
- Best@k:从N个结果中选择F1最高的,性能随N显著跃升,从单次运行的35.4提升至8次运行的60.8。
- Majority Voting:采用多数投票决定最终输出,性能仅从35.4提升至41.8,远落后于Best@k的上限。
这一差距说明,模型具备解决任务的潜在能力,但缺乏可靠的路径选择机制。多数投票无法识别正确的推理轨迹,而Best@k的上限表明,若能改进路径评估与回溯机制,性能仍有巨大提升空间。测试时扩增是一个有前景的方向,但需要配合更鲁棒的推理路径优先级判断机制。
错误分析
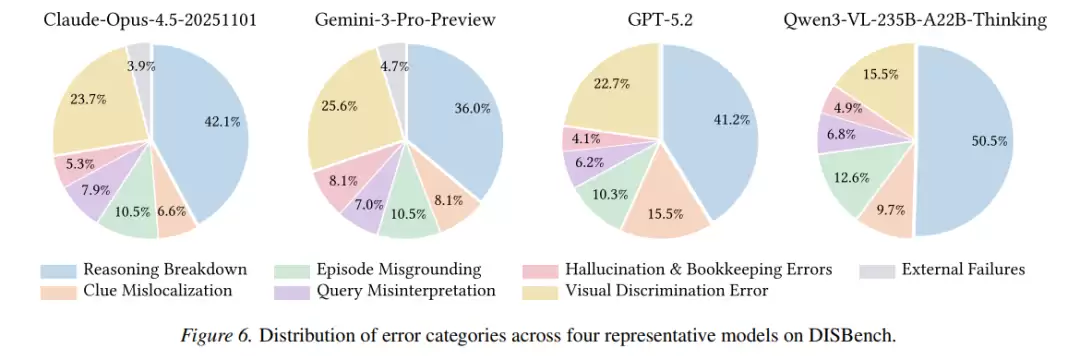
对几个代表性模型的失败案例进行人工标注后,错误分布呈现明显规律:
- 推理崩溃(36%-50%):占比最高的错误类型。模型虽然定位到了正确的情境,但在执行多步计划时中断——或过早终止、或在探索中丢失约束条件、或未能完成必要的证据链串联。这印证了长程规划与状态跟踪是当前的核心短板。
- 视觉判别错误(22%-26%):第二大类错误。细粒度感知仍具挑战,包括实体身份确认(如判断两座教堂是否为同一建筑)和属性级判断(如“是否只有主唱”)。
- 情境锚定失败(7%-16%)与线索误定位(6%-11%):合计占相当比例,表明模型难以将搜索锚定在正确的时空上下文中,这与事件间查询更难的现象一致——跨事件关联发现仍是瓶颈。
- 查询误解(4%-8%)与幻觉/记账错误(4%-7%):相对较少,说明语言理解不是主要障碍。核心问题出在规划执行、约束跟踪与状态管理,而非视觉理解本身。
结论很明确:提升DISBench性能的关键,不在于使用更强的视觉编码器,而在于改进智能体的规划能力、长程状态跟踪与跨事件关联发现机制。
06、总结与展望
DeepImageSearch 是一次图像检索范式的重要升级。它不再局限于单张图像的语义匹配,而是面向真实的个人视觉记忆场景,提出了「主动探索 + 多步上下文推理」的新方向。
从手机相册的智能搜索、家庭影像的自动化归档,到更广泛的数字记忆管理,DeepImageSearch 所展现的思路都具有极高的落地价值。它让我们看到了图像检索从简单的“搜图片”向复杂的“找记忆”演进的可能性,也为下一代多模态智能体的发展提供了新的思考维度。
这是一项颇具启发性的工作,它指出的问题真实存在,其提出的解决方案也开辟了一条值得深入探索的技术路径。
相关攻略

OPPO推出Bubble潮玩自拍屏,采用磁吸设计,可吸附于金属表面,支持十米远控拍摄。用户可更换个性化保护壳,自由切换屏幕壁纸。该产品已于京东开启预约,限量赠送定制保护套,并将与Reno16系列于5月25日同步发布。

OPPO推出可吸附于手机背面的Bubble潮玩自拍屏,具备自拍预览、自定义显示图片等功能。博主体验称其操作流畅,延迟低,或支持高刷新率。屏幕亮度高且熄屏时间预设较长,暗示功耗控制较好。该配件与即将发布的Reno16系列同期亮相,未来可能产生联动。

OPPO宣布将于5月25日发布磁吸式圆形配件“Bubble潮玩自拍屏”。该产品可直接吸附于手机背面,支持自定义显示内容,兼具个性装饰与实用功能。其屏幕素质出色,操作流畅,并能充当自拍取景器,提升拍摄体验。配合专用保护套,还可作为独立挂件使用,拓展佩戴方式。

OPPO在京东上架Bubble潮玩自拍屏配件,采用圆形屏幕设计,造型别致。新品将于5月25日发布,限量赠送定制保护套。此前爆料显示该配件支持自定义壁纸与遥控拍照,可能与同日亮相的Reno16系列手机同台发布。

OPPO将于5月25日发布多款新品,包括EncoAir5s真无线耳机、PadAir5平板、Reno16系列手机、Bubble自拍屏及Pad6平板。耳机采用半入耳设计,支持旗舰人声降噪和48小时续航;平板配备2 8K柔光屏与10050mAh电池,运行ColorOS16系统。
热门专题







热门推荐

今年三月,谷歌DeepMind高级科学家Alexander Lerchner发表了一篇重磅论文,其核心结论清晰而深刻:基于算法的符号操作在结构上注定无法产生真正的意识——无论未来模型规模如何庞大、架构如何精巧,甚至是否为其配备仿生身体,这一根本性限制或许都无法被跨越。 仔细审视这一论断,它并非一个关

研究针对AI助手难以执行复杂屏幕操作的问题,构建了CUActSpot评测基准,通过代码渲染自动生成含精确坐标的多样化训练数据,并训练了一个40亿参数模型。实验表明,提升训练数据多样性比单纯扩大数据规模更能有效增强模型通用操作能力,并展现出跨任务泛化潜力。


《迷你世界》于2026年5月15日发布全新激活码,玩家可凭兑换码领取酷炫角色装扮、迷你币及稀有道具,请及时复制有效激活码前往游戏内使用。

《我的世界》于2026年5月17日发布免费兑换码EMMMyxhjVHMApsb2,可兑换游戏道具与装饰。兑换码常有时间或次数限制,请尽快使用。更多兑换码可查看官方汇总页面。