近日,具身智能机器人公司鲸跃动力宣布完成数千万元种子轮融资,本轮由星海图独家领投,深渡资本担任独家财务顾问。这家成立于2026年的创新企业,致力于通过“数据-模型-执行”的闭环体系,打造可订阅、可弹性扩展的“机器人劳动力”(Robo Labor),旨在高效替代高危、繁重、脏乱及高度重复的体力劳动场景。
融资进展与投资方视角
本轮所获资金将重点投入于团队建设、产品量产交付、专家技能库研发以及核心数据资产的采集与运营。领投方星海图阐述了其投资逻辑:他们认为,具身智能竞争进入下半场,决胜关键在于“数据效率×模型泛化×末端执行”三者构成的系统性能力。鲸跃动力以数据为核心驱动,聚焦真实工业场景的快速交付与迭代,其团队兼具数据科学、AI模型与工程交付的复合背景,这种能力组合在当前市场中尤为稀缺。
产品逻辑:数据驱动的场景化落地
鲸跃动力专注于企业级(To B)市场,提供软硬件一体化的机器人解决方案。其产品哲学并非盲目追求模型的极端复杂,而是强调在高质量真实数据、场景化专用模型与高精度末端执行器之间,构建一个高效、可工程化的闭环,从而实现解决方案的快速部署与规模化复制。
这一思路与海外如Sunday、Generalist AI等领先公司的实践路径一致,后者已验证了“数据是规模化落地第一性原理”的行业共识,并最终收敛于“第一人称视角(Ego-centric)数据与通用操作接口(UMI)”的技术方案。鲸跃动力正沿此路径,构建了自身的三层核心技术壁垒。
首先,是自研的高精度多模态数据采集系统。该系统能够实现亚毫米级的空间定位精度与亚毫秒级的多源信号时间同步,全面采集视觉、力觉、位姿及环境交互数据,并在边缘侧进行实时场景理解与分析,从源头确保数据质量与可用性。
其次,是构建了百万小时级别的规模化数据管线与“人在回路”优化策略。通过覆盖海量复杂工况的真实作业数据,并结合Human-in-the-Loop(人类介入决策)模式,利用人类专家的即时纠偏能力,确保机器人在部署首日即达到可用状态,并在此基础上实现持续自主进化。
最后,是自研的3D物理世界模型与专家技能库。基于高质量数据底座,构建高保真的物理认知与推理引擎。这使得机器人不仅能“看见”物体,更能理解重力、摩擦、材料形变趋势与交互边界,实现从简单的“感知-执行”到高级的“认知-预测-自适应”能力跨越。
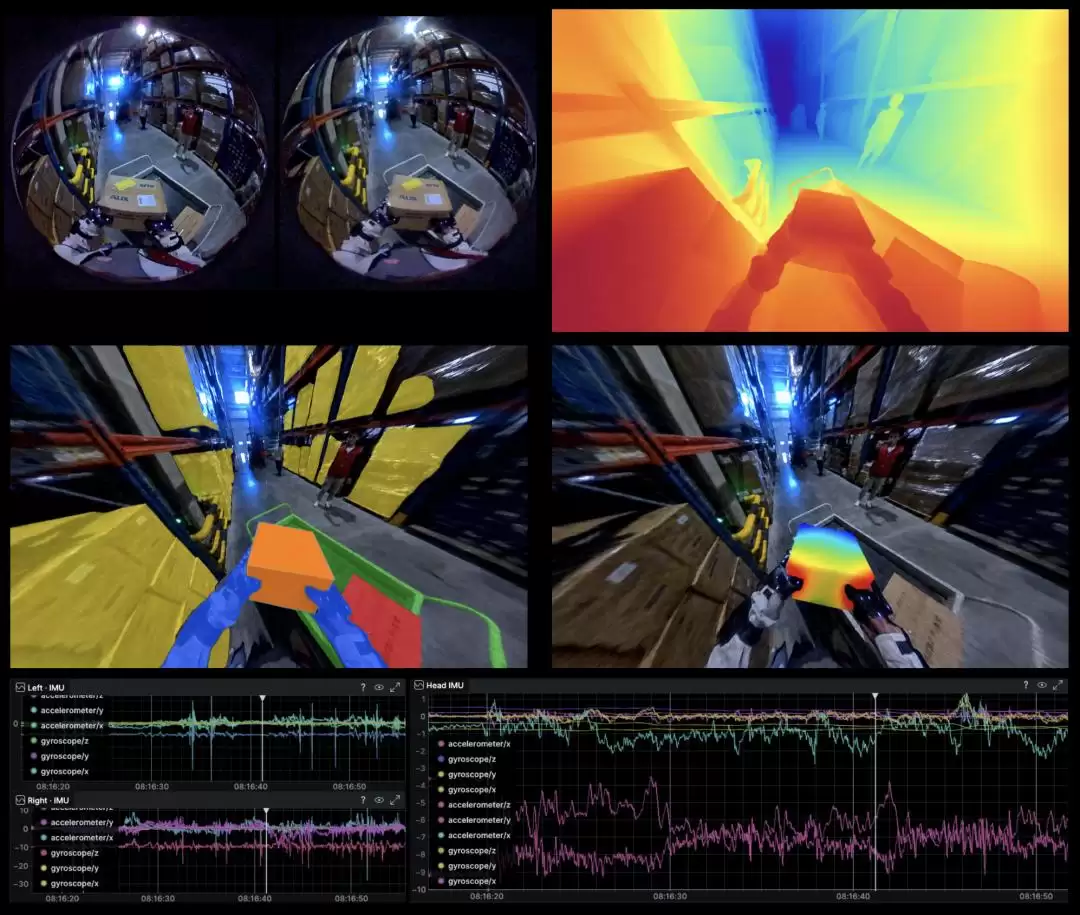
△鲸跃动力的数据采集可视化,图源:企业提供
以典型的物料搬运装卸场景为例,其产品能够无缝对接客户现有仓储管理系统(WMS)或制造执行系统(MES),实现室内外全场景自主导航、高精度位姿搬运与柔性自适应装卸等核心能力。目前,公司已与智能制造、智慧物流领域的多家头部客户达成合作,推动产品在多个实际场景中落地应用。
团队:兼具前沿研发与量产落地经验
公司创始人兼CEO李广宇博士,毕业于美国南加州大学电子工程系。其职业生涯横跨自动驾驶与具身智能两大前沿领域:曾任职于滴滴、轻舟智航,主导构建了百万级规模的自动驾驶数据闭环与仿真测试体系;随后担任北京人形机器人创新中心具身数据与灵巧操作负责人,从零到一搭建团队,主导了多个行业标杆数据集与智能体项目的研发。

△鲸跃动力创始人兼CEO李广宇博士,图源:企业提供
核心团队覆盖了数据、算法、硬件、软件及全球商务的全产业链条,成员主要来自极智嘉、新石器、理想汽车、小米等科技头部企业,并拥有RoboMaster等顶级机器人赛事冠军背景。团队不仅具备深厚的技术研发积累,更拥有从前沿算法创新到万台规模量产、百万级数据交付的完整工程化落地能力,以及丰富的海外技术研发与本地化部署经验。
创始人思考:行业洞察与公司定位
谈及机器人商业落地,观点非常清晰:在要求严苛的To B市场中,仅拥有一台能运行甚至单位经济模型(UE)为正的机器人是远远不够的。企业必须成为特定细分场景下的“最优解”,才能建立长期竞争优势。这就要求产品必须深度解构现有工作流程,像齿轮一样精准嵌入业务链条,并从人力消耗最大、投资回报率(ROI)最显著的环节切入。
当前,行业竞争壁垒正从单点算法突破转向系统工程能力。未来的胜出者,将是那些能够以最低数据成本实现操作技能泛化,并以最高效率占领核心应用场景的“场景型机器人公司”。随着机器人硬件供应链日益成熟、数据基础设施规模化以及AI大模型与智能体(Agent)能力爆发,机器人公司正迎来从传统的“项目制定制集成”模式,向“标准化产品平台”模式演进的历史性机遇。
关于公司生态定位,鲸跃动力明确聚焦于“数据层与应用层”。他们正在打造一个开放、易用的通用机器人技能平台,核心专注于数据驱动、闭环迭代与落地部署。其终极愿景是,客户在接入标准化硬件、打通业务系统与传感器后,能够像调用云计算服务一样,便捷地调用所需的机器人技能来解决具体生产需求,让物理世界的劳动力变得像数字世界的算力一样,可订阅、可扩展、触手可及。
封面来源|企业提供





