AI三维空间感知与几何理解机制原理解析
如今的人工智能技术,已经能够在毫秒级别识别厨房照片中的物体,精准分割街景中的每个元素,甚至生成现实中从未存在过的逼真室内图像。然而,当你要求它走进一个真实的房间,回答“哪个物品放在哪个架子上”、“桌子距离墙壁有多远”或“天花板与窗户的边界在何处”这类涉及空间关系的问题时,它的局限性便暴露无遗。
当前主导计算机视觉领域的主流模型,其本质仍是在二维平面上进行运算。它们擅长对像素网格进行模式识别与推理,但对于这些像素所代表的真实三维世界的内在结构与空间关系,却缺乏深刻的理解。
这种“像素智能”与“空间智能”之间的巨大鸿沟,绝非无关紧要的技术细节。它正是阻碍当前AI系统迈向最具价值的物理世界应用——例如在复杂仓库中自主导航的机器人、能精准避障的自动驾驶汽车、能高保真复刻实体建筑的“数字孪生”——的核心瓶颈。
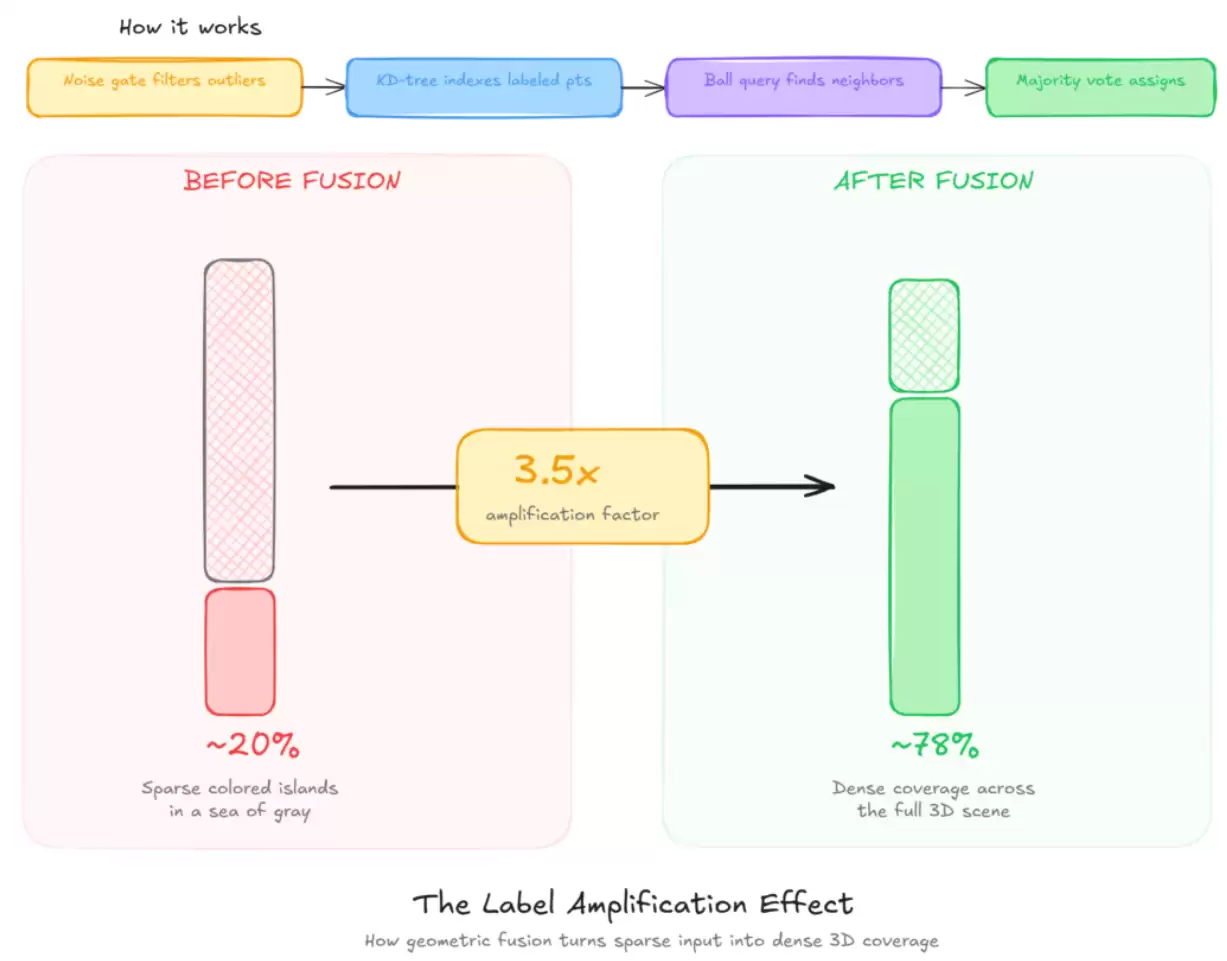
本文将深入剖析三个正在加速融合的人工智能技术层次,正是它们共同协作,使得机器能够从普通的二维照片中理解三维空间成为可能。我们将重点关注其中常被忽视的“几何融合”层,它如何将来自单张图像的、充满噪声的预测,转化为连贯、一致的三维场景语义标签。实际生产流程的数据表明,这一过程能产生高达3.5倍的“标签放大”效应,将点云的语义覆盖率从20%显著提升至78%。对于从事三维重建、点云处理或视觉基础模型研发的从业者而言,理解这一层或许是补齐技术拼图、实现突破的关键。
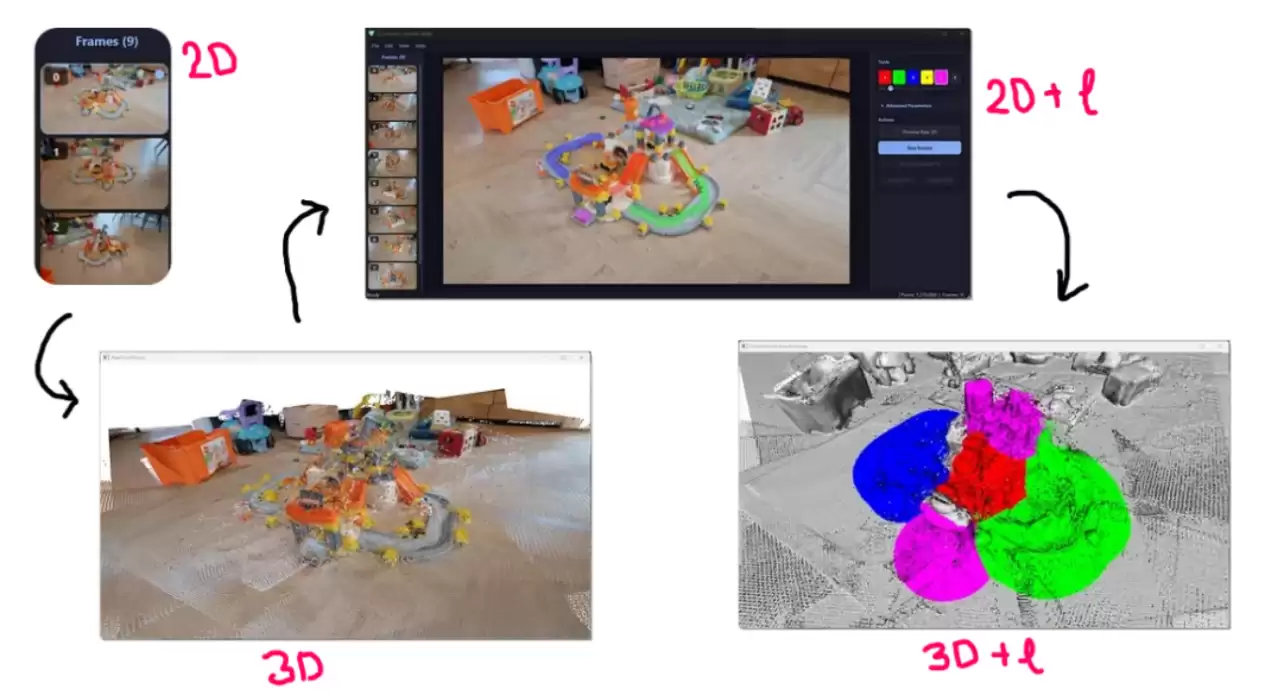
空间人工智能完整流程:通过深度融合三个AI技术层,将单张照片转化为具备深度感知与语义标注的三维场景。(C) F. Poux
被忽视的痛点:三维语义标注的瓶颈
仅从照片序列重建三维几何,在今天已是一个相对成熟的技术。
基于运动恢复结构(Structure-from-Motion,SfM)的流程已发展二十余年,能够通过匹配图像特征点来三角测量物体的三维位置。而像Depth-Anything-3这类先进的单目深度估计模型的出现,意味着如今无需任何专用深度传感器,仅凭一段智能手机拍摄的普通视频,就能生成稠密的三维点云。
几何有了,但语义缺失。
一个包含数十万甚至上百万个点却没有任何语义标签的点云,虽然视觉上壮观,却无法支撑任何有意义的空间查询与应用。你无法命令它“仅显示所有墙壁”、“计算地板总面积”或“选中距离配电盘两米范围内的所有物体”。要回答这些问题,要求点云中的每个点都携带准确的语义标签,而大规模生成这些标签的成本至今仍然极其高昂。
传统方法严重依赖昂贵的激光雷达扫描设备和专业标注团队,后者需要在专用软件中手动为海量点云数据逐一点击、划分类别。一名熟练的标注员处理一栋商业建筑单层的室内场景,就可能耗费8到12小时。将这一时间成本乘以整个园区或一支扫描车队的规模,总成本便会呈指数级攀升。
诸如PointNet++、MinkowskiNet等经过训练的三维分割网络可以实现流程自动化,但它们本身需要大量昂贵的带标签三维数据来训练,且往往具有强烈的领域依赖性——在办公室场景下训练出的模型,在建筑工地或工厂车间可能完全失效。
另一方面,彻底改变了二维计算机视觉的零样本基础模型(如SAM、Grounded SAM、SEEM)完全在图像平面上操作,生成的是二维像素掩码,而非可直接用于三维空间的三维标签。
于是,整个领域陷入了一个尴尬的境地:三维几何重建与二维语义预测各自都取得了长足进步,却缺乏一种简洁、通用且高效的方法将二者无缝、精准地结合起来。问题的核心已不再是AI能否理解三维空间,而在于如何将二维空间中高效、灵活的预测能力,与三维空间的几何结构和一致性要求进行精准的“桥接”。

从耗时的手动三维标注迈向全自动空间理解的演进之路,其中几何融合层扮演了连接不同数据维度的关键桥梁角色。
空间人工智能的核心:三层融合架构
2024年至2025年间,一个清晰的技术趋势正在形成。三个原本独立发展的研究方向已逐渐成熟,并能够被整合到一个统一的处理流程中。这种融合产生的协同效应,其效能远超任何单一技术方案。
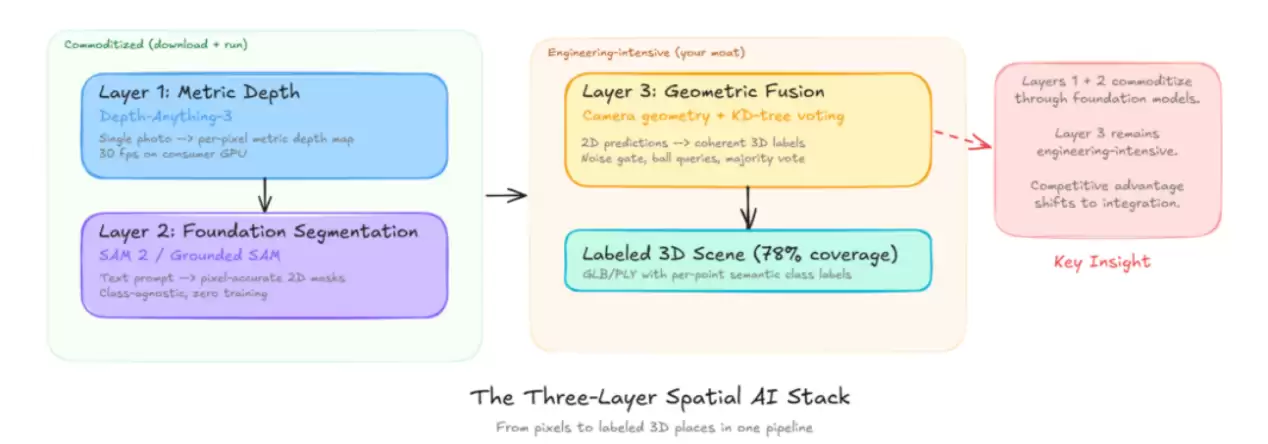
空间人工智能的三层技术栈架构
第一层:基于单张图像的度量深度估计
以Depth-Anything及其后续迭代模型(DA-V2、DA-3)为代表的技术,仅需输入一张RGB照片,就能预测出图像中每个像素对应的深度图。
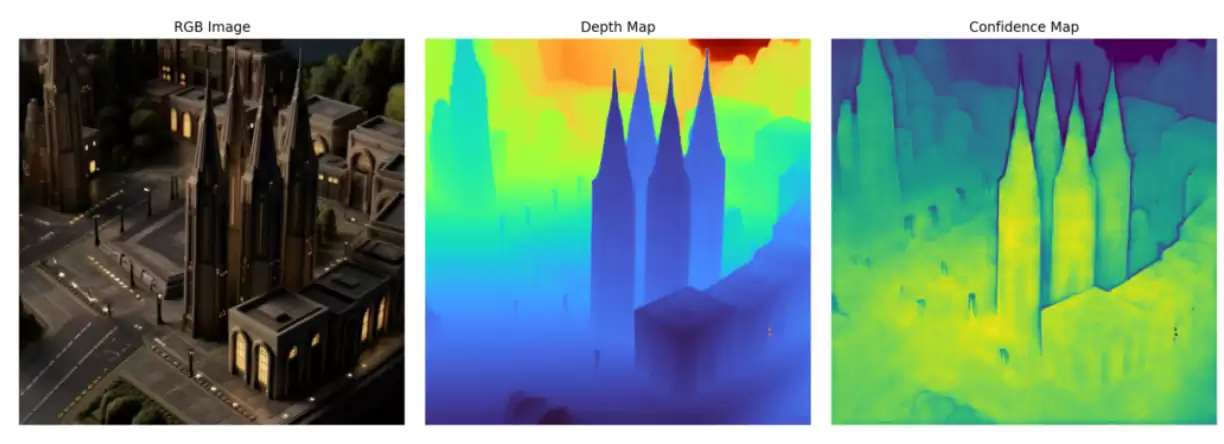
AI模型生成的图像深度图可视化示例
关键的技术突破并非深度预测本身(这项技术自深度学习兴起早期就已存在),而是从“相对深度”预测到“度量深度”预测的转变。相对深度只能告诉你“桌子比墙壁更近”,这对图像后期处理有用,但对精确的三维重建却不够。度量深度则能告诉你“桌子距离相机1.3米,墙壁距离4.1米”——这意味着你可以将这些物体表面精确地放置在真实世界坐标系中。
Depth-Anything-3等先进模型在消费级GPU上能以约每秒30帧的速度生成度量深度,这为其在机器人、AR等实时应用场景中铺平了道路。
第二层:基于文本提示的零样本图像分割
Segment Anything Model(SAM)及其衍生模型(SAM 2、Grounded SAM、FastSAM)可以通过简单的用户交互(如点击、框选)或文本提示,将任意图像分割成多个语义连贯的区域。

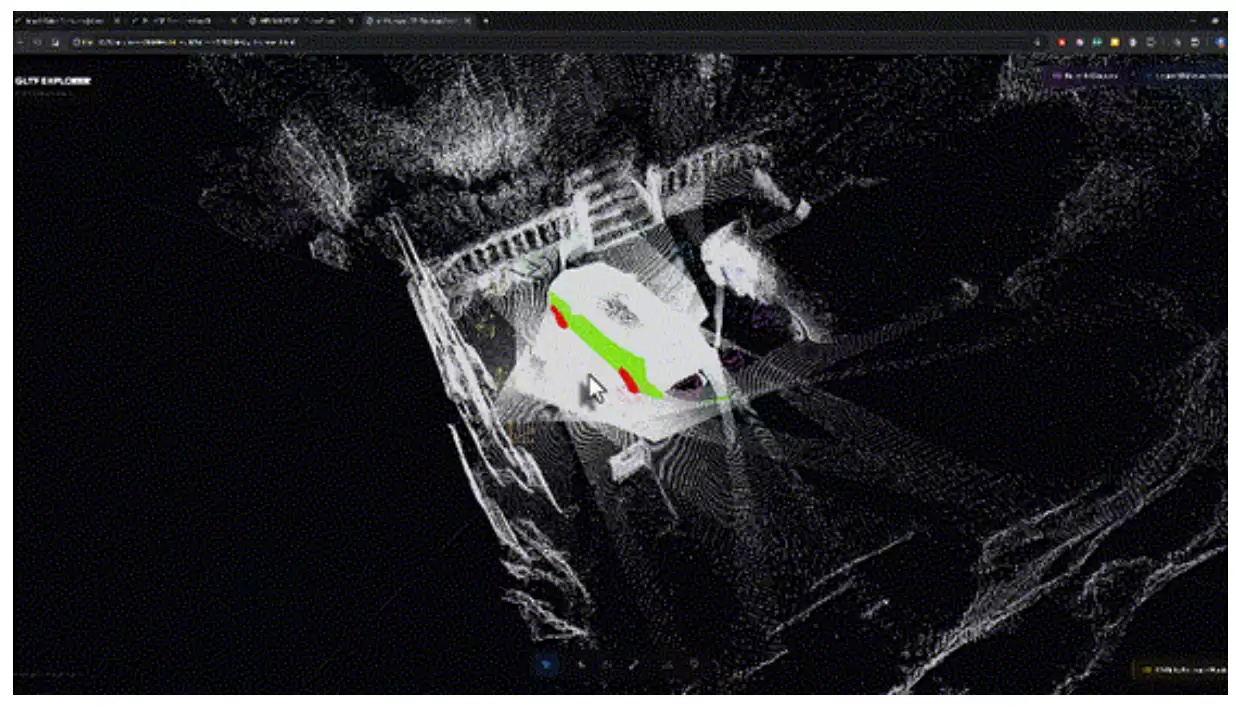
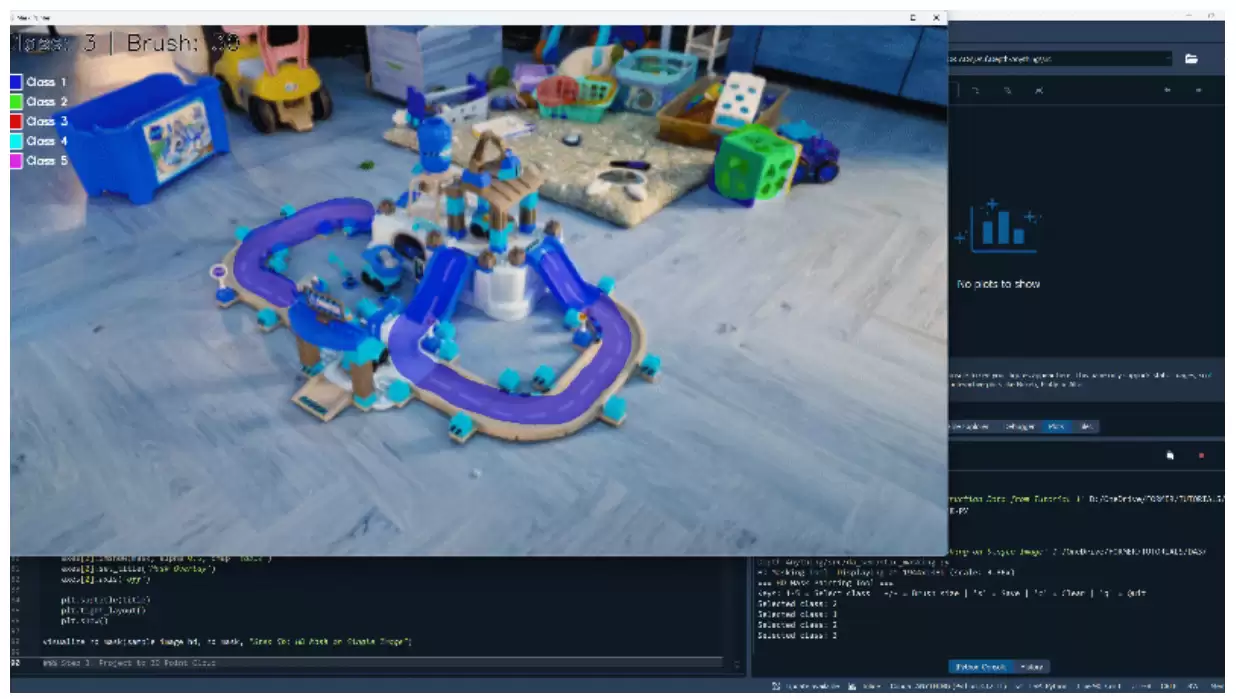
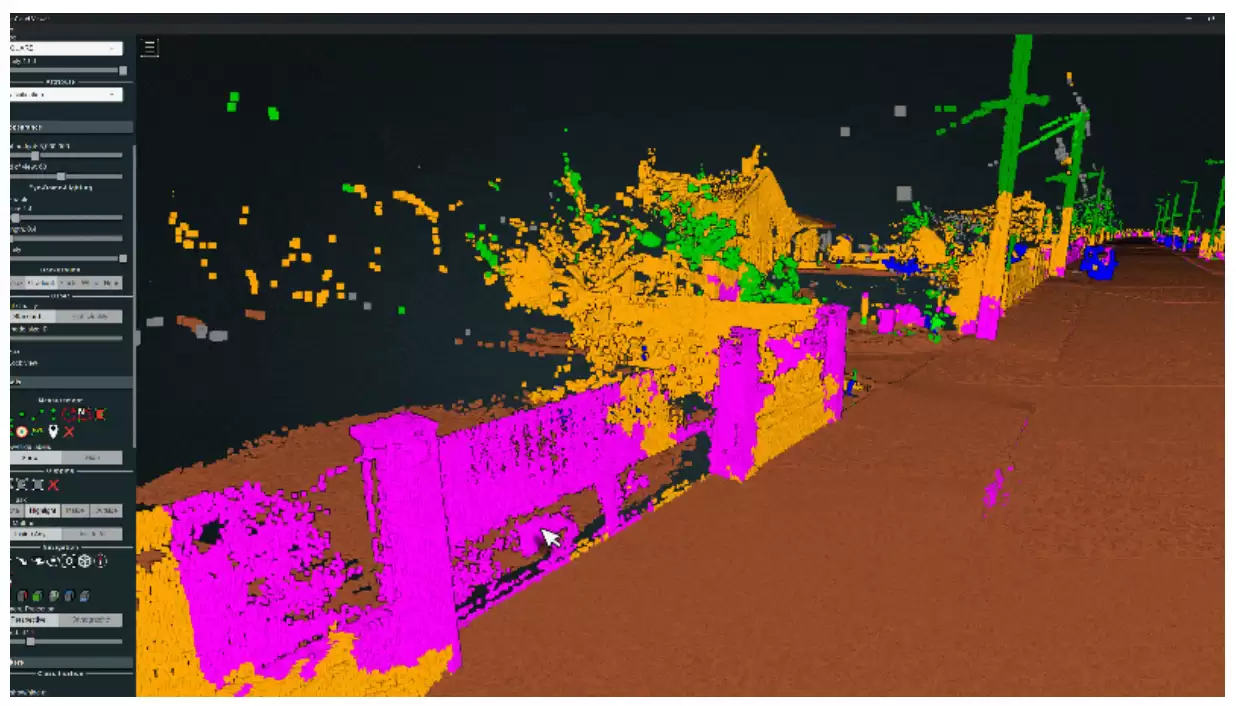
基于三维点云数据驱动的视觉基础模型分割结果。(c) F. Poux
这些模型在最实用的意义上是“类别无关”的:它们无需在训练数据中见过你指定的特定物体类别。无论是工业阀门、医疗手术器械还是儿童玩具,SAM都能生成像素级精确的掩码。当与文本定位模块(如Grounded SAM)结合时,系统能力便从“分割我点击的任何东西”升级为“自动分割所有看起来像‘管道’的物体”,这正是迈向全自动化流程的关键一步。
第三层:几何融合(核心集成层)
前两层技术已趋于标准化,开发者可以轻松下载预训练模型,直接获得可用于生产的深度图或分割掩码。而第三层——几何融合,才是真正的工程挑战所在,也是鲜有开源方案能完整提供的核心部分。
相机内参(焦距、畸变等)和外参(位置、姿态)提供了二维图像坐标与三维世界坐标之间的精确数学映射关系。如果已知这些参数,并结合每个像素的深度值,就可以将任何二维预测(如分割掩码)投影到其对应的精确三维空间位置。

图像相对于物体的精确位姿是实现高质量、连贯几何融合的关键前提
反投影本身的数学原理是清晰的(核心是基于针孔相机模型的坐标变换)。真正的挑战在于如何处理带有噪声的深度信息、解决来自不同视角的预测冲突,并将稀疏、不完整的二维预测转化为对三维点云的密集、全覆盖的语义标签。能否稳健、高效地实现这一过程,正是区分学术演示与实际可部署应用系统的关键。
这个三层架构揭示了一个普遍趋势:感知层(深度估计、图像分割)正通过强大的基础模型迅速“商品化”,而集成层(几何融合、跨视角一致性处理)则仍需大量的工程化投入与领域知识。行业的竞争优势正从“拥有更好的单一模型”,转向“拥有更优的系统集成与融合能力”。
空间人工智能技术栈的实际工作流:深度估计、语义分割与几何融合相结合,可从普通照片自动生成带丰富语义标签的三维场景
几何推理:实现从二维像素到三维标签的跨越
空间人工智能技术栈的核心操作可概括为“维度桥接”:在最容易、最高效的维度(2D图像)执行复杂的感知任务,然后将结果精准地转移到最终需要的维度(3D空间)。
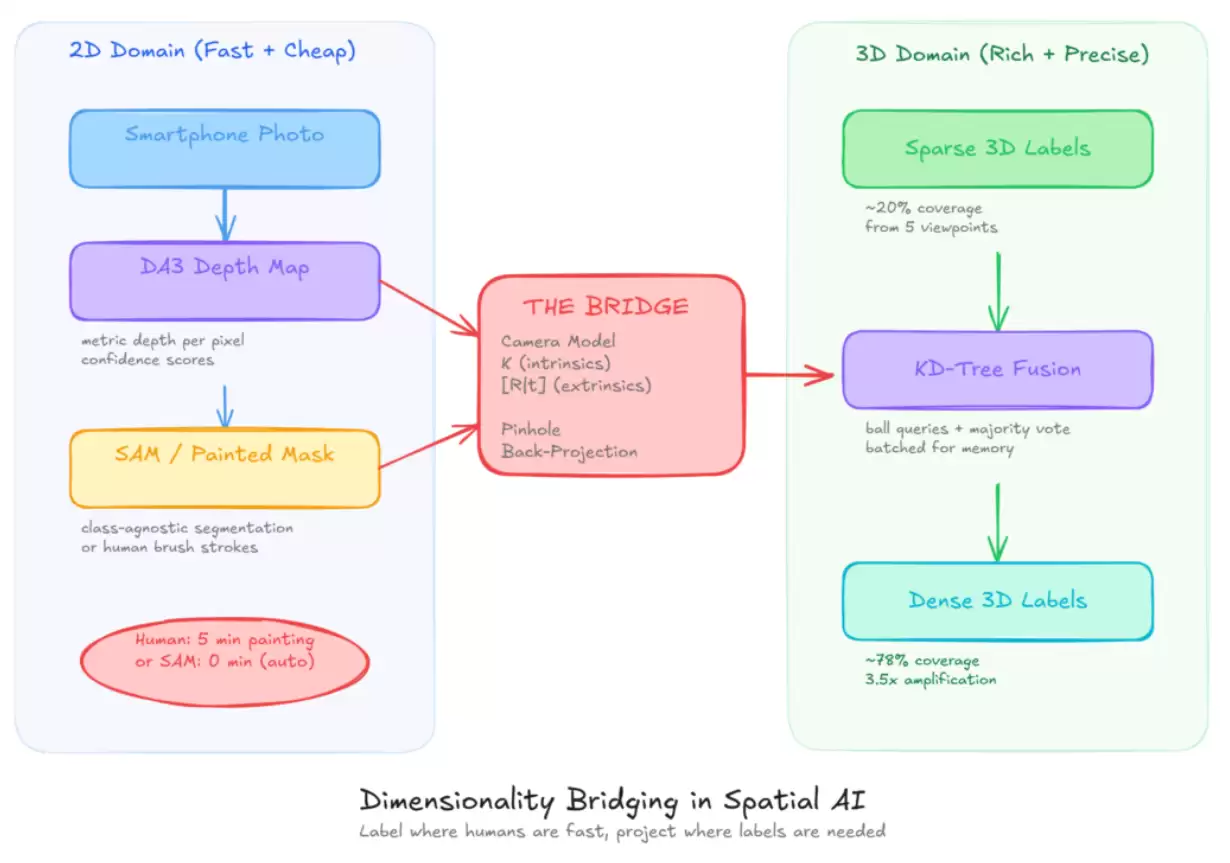
从二维模型预测到三维空间标签的维度转换示意图
无论是人类标注员还是AI模型,在标注2D图像时都更快、更准、成本更低;而直接标注3D点云则缓慢、昂贵且容易出错。因此,最自然的策略是:在2D空间进行标注或预测,再利用相机几何将其“提升”到3D空间。
然而,单目深度估计得到的深度图并非完美,在物体边缘、反射表面和纹理缺失区域存在误差。单个视角的掩码反投影可能将标签放置到错误的三维位置。当组合多个视角的预测时,不同相机对空间中同一点可能给出不同的语义标签,产生冲突。这时,就需要智能的融合算法来仲裁和优化。
一个带有已知深度和语义标签的像素,通过相机模型变换到三维世界坐标系中的原理示意
四阶段融合流程:实现三维标签的高效传播
一个经过多个实际项目验证的稳健融合流程通常包含四个阶段,每个阶段专门处理一种特定的数据噪声或标签冲突。其设计理念清晰地体现在核心函数的签名中:
def smart_label_fusion(
points_3d, # 完整场景的三维点云 (N, 3)
labels_3d, # 从多视角投影后得到的稀疏三维标签
camera_positions, # 各个相机在世界坐标系中的位置
max_distance=0.15, # 标签传播时进行球形查询的半径
max_camera_dist=5.0, # 噪声门控:忽略距离任何相机过远的点
min_neighbors=3, # 民主投票生效所需的最小邻居数(法定票数)
batch_size=50000 # 内存受限时,分批处理的数据块大小
)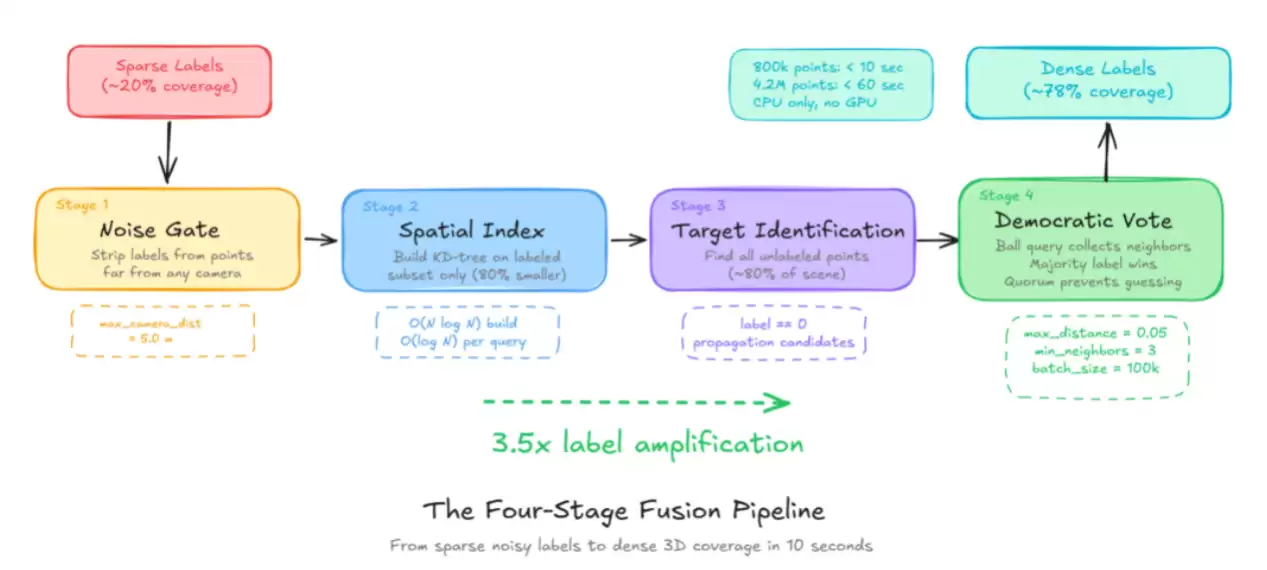
四阶段智能融合流程:1. 距离滤波去除噪声;2. 空间索引加速查询;3. 目标识别发现未标记区域;4. 民主投票填充空白。
第一阶段:噪声门控。 距离任何相机位置都很远的点,很可能是三维重建过程中产生的伪影或噪声,其携带的标签可靠性极低。通过计算每个已标记点到最近相机的距离,并剔除超过设定阈值(如max_camera_dist)的标签,可以有效消除这类长距离误差。
第二阶段:空间索引加速。 算法并非为整个包含80万个点的点云构建空间索引,而是仅为那些已经获得标签的点(通常只占一小部分)构建KD树等高效数据结构。这能将索引大小减少80%以上,极大加速后续的邻近查询操作。
第三阶段:目标识别。 经过噪声过滤后,所有标记为“未知”或“未标记”的点都成为标签传播的候选目标。在一个典型的五视角拍摄场景中,大约只有20%的点能直接从图像投影中获得标签,这意味着高达80%的点在等待被“赋予意义”。
第四阶段:民主投票。 对于每个未标记点,算法在其周围一个球形半径(max_distance)内,搜索所有已标记的邻居点。如果找到的邻居数量少于设定的法定票数(min_neighbors),则该点保持未标记状态(算法“弃权”,避免低置信度的猜测);否则,邻居点中得票最多的语义标签将“胜出”,并赋予该未标记点。
min_neighbors参数是平衡覆盖率与准确率的关键。将其设为1,意味着单个噪声标签可能不受控制地传播;将其设为3-5,则要求至少有三到五个独立的已标记点在局部空间内达成共识,投票才有效。这通常在覆盖率和准确率之间取得了最佳平衡,因为深度噪声或分割错误很少能恰好将三个错误的标签放置在同一个很小的空间邻域内。
整个融合过程在消费级CPU上,对80万个点运行时间通常不到10秒。它无需GPU加速,无需额外的模型推理,也无需任何训练,纯粹依赖于高效的计算几何算法。正因如此,这套方法具有良好的通用性,可推广应用于室内场景、室外环境、工业零件、考古文物等多种领域。
实际效能:标签覆盖率从20%跃升至78%
当我们将五张照片(假设总共拍摄了十五张)的语义预测结果投影到三维点云上时,通常只有大约20%的点能直接获得标签,覆盖稀疏且不均匀,就像灰色海洋中零星散布着一些彩色岛屿。
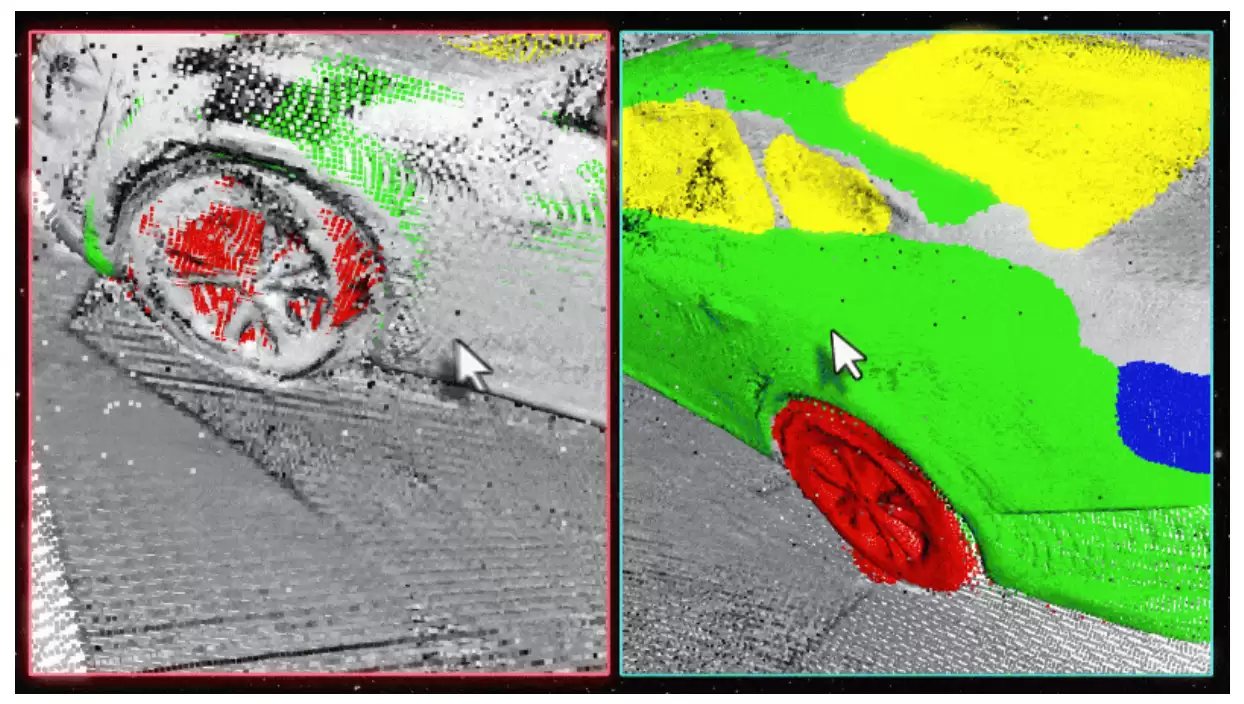
融合前(左图):约20%的点云上分布着稀疏的彩色标签斑块。融合后(右图):通过几何标签传播,语义覆盖率提升至约78%。
运行上述智能融合流程后,语义覆盖率可以跃升至约78%。这3.5倍的增长完全来自于“球形查询+民主投票”步骤中的几何推理能力。这意味着:
- 无需任何额外的人工标注干预。
- 没有进行任何新的模型推断。
- 系统没有输入任何新的信息。
算法仅仅利用了三维空间中的邻近性原理和多数共识机制,就将已有的稀疏标签智能地传播到了附近的未标记点上。那些最终仍未被标记的点大致分为两类:一是相机确实无法清晰观测到的区域(如严重遮挡处、狭小缝隙);二是位于不同语义类别的边界处,球形查询找到了来自多个类别的邻居,但没有一个类别的票数达到法定要求——此时算法正确地选择了“弃权”而非强行猜测。这两种“失败”模式恰恰指明了在实际采集数据时需要补充拍摄视角的位置。
几何融合层本质上充当了一个强大的“标签放大器”。无论上游的初始预测是来自人工标注、SAM模型还是未来的任何文本提示模型,都会被放大相似的倍数。如果用SAM等基础模型完全替代手动绘制,整个流程将实现端到端的全自动化:2D基础模型进行预测,3D几何融合进行放大,全程无需人工介入。融合层不关心初始标签的来源,只关心它们在三维空间中的分布是否足够一致,以确保投票结果的可靠性。
三维语义标签的智能放大策略示意图
开放挑战与未来发展方向
当前的基础模型通常对每张图像进行独立预测。SAM不知道前一帧分割了什么,Depth-Anything-3也不会强制要求跨不同视角的深度预测保持一致。当将这些基于单张图像的独立预测投影到统一的三维空间时,矛盾便会产生:一个视角可能将某片区域标注为“墙壁”,而另一个视角则可能将其标注为“天花板”。
融合层通过多数投票机制部分解决了这类分歧。如果七个相机说“墙”,两个说“天花板”,那么该点就被标记为“墙”,这通常是合理的。然而,在真实的物体类别边界处(例如墙面与天花板的交界线),投票结果可能像抛硬币一样不确定,导致边界模糊。
在室内场景中,这种边界定位的偏差通常在5到15厘米之间。对于施工进度监控、设施空间管理等大多数行业应用,这个精度是可以接受的;但对于需要毫米级精度的竣工BIM建模或高精度工业检测,则构成了挑战。
真正的下一个技术前沿是“多视图一致性”优化:让上游的感知模型在进入融合层之前,就能感知并考虑其他视角的预测结果。SAM 2通过在视频帧之间传播掩码向这个方向迈进了一步,但它仍在二维图像空间运作,并未强制执行三维几何一致性。未来的系统需要将三维融合结果反馈到二维预测循环中,根据逐渐形成的三维全局共识来动态校正每一幅图像的掩码预测,从而形成一个完全闭合的、自我优化的循环。
目前,空间人工智能技术栈已经变得高效、快速,并且对于80%的实际应用场景,剩余的瑕疵是在可接受范围内的。行业的瓶颈正逐渐从“如何生产标签”转向“如何保证标签质量”,这本身就是一个更高级、更值得解决的问题。
展望:未来12-18个月的趋势
根据研究实验室和行业领先项目的观察,未来的发展趋势将紧紧围绕自动化程度的深化与输出质量的提升。用于验证融合输出质量的技术(如按类别统计、覆盖率指标、边界清晰度检查)将演变为位于全自动处理堆栈顶部的智能诊断层。深刻理解整个融合流水线原理的工程师,将在其大规模运行时负责系统的调试、优化与持续改进,这才是技术价值真正沉淀的环节。
通过融合基础模型预测与相机几何信息生成的完整、精细标注的三维场景:这正是空间人工智能技术正在努力实现的终极输出形态。
相关攻略

你是否好奇,游戏《GTA》中飞驰的汽车与现实中监控摄像头拍下的车辆,在人工智能的“视觉系统”里究竟有多大差别?尽管现代游戏画面已极为逼真,光影、材质与场景构建都栩栩如生,但对于自动驾驶、交通监控、智慧城市管理等需要落地应用的AI算法而言,虚拟游戏图像与真实世界照片之间,依然横亘着一道肉眼难以分辨、却

这项由香港大学、京东探索研究院、清华大学、北京大学和浙江大学联合完成的研究,以技术报告形式发布于2026年4月,论文编号为arXiv:2604 25427,有兴趣深入了解的读者可通过该编号查询完整原文。 你是否曾尝试用AI生成视频,却对结果感到失望?画面与描述不符、人物肢体扭曲、场景光影闪烁,最终视

2026年4月,一项由伦斯勒理工学院与亚利桑那州立大学联合开展的研究,在arXiv预印本平台发布(编号:arXiv:2604 24040v1),系统性地揭示并量化了AI表格检索领域一个长期存在的“盲点”——表格序列化格式对检索性能的巨大影响。 一、格式不同,AI就“认不出”同一张表格了? 设想一个典

腾讯混元团队提出新方法,使模型在推理时能根据输入动态生成参数,实现实时适配。实验表明,该方法在图像编辑任务中效果显著,能有效处理冲突需求,并在多项评测中领先,推动了智能模型从静态向动态演进。

北京大学团队提出DistDF损失函数,基于最优传输理论对齐预测与真实标签的联合分布,规避传统逐点损失中的独立性假设,实现无偏训练。该方法能有效捕捉序列整体形态与结构,兼容多种模型,在实验中展现出更优性能。
热门专题







热门推荐

2026年5月6日,存储行业迎来一个标志性节点:美光正式向市场交付其6600 ION系列固态硬盘的245TB版本。这不仅刷新了商用SSD的容量纪录,更意味着数据中心存储的密度与能效竞赛,进入了新的阶段。 这款“巨无霸”SSD的核心,是美光自研的第九代(G9)276层3D QLC NAND闪存颗粒。为

2026年5月5日,小米汽车旗下备受期待的首款增程式全尺寸SUV——内部代号“昆仑”的路试谍照正式曝光。作为一款瞄准多人口家庭用户市场的战略车型,“昆仑”采用了当前市场热门的增程式混合动力技术路线,旨在为用户提供无里程焦虑的纯电出行体验。 据悉,这款全新SUV计划于2026年下半年正式上市发布,其亮

备受期待的荣耀600系列手机国行版本,即将在本月下旬正式登陆国内市场。根据最新备案信息,该系列将提供六款独具特色的配色供消费者选择,分别为:象征喜悦的“好事橙”、寓意美好的“幸运星”、清新淡雅的“茉莉白”、活力十足的“青苹果”、深邃迷人的“光羽蓝”,以及永不过时的经典“曜石黑”。 从硬件配置来看,荣

近日,游戏界传来一则颇具讨论价值的消息。由前《巫师3》总监Konrad Tomaszkiewicz领衔的工作室Rebel Wolves,正式公布了其正在开发的黑暗奇幻角色扮演游戏《黎明行者之血》的一项激进设计:玩家在完成序章后,几乎可以跳过所有支线任务与地图探索,直接挑战位于城堡中的最终BOSS。

在王者荣耀的对抗路中,老夫子凭借其独特的机制,始终是令对手头疼的强势英雄。想要真正掌握这位“单挑王”,一套精准的攻速铭文搭配与灵活的出装思路,是奠定你线上压制力与团战影响力的关键。正确的配置,能让你从对线期开始就掌握主动权。 攻速铭文搭配:构筑前期优势的核心 铭文是英雄前期作战能力的基石。对于依赖普