对话孙宇教授解析大语言模型在机器人任务规划中的应用
在工业自动化领域,机器人“四大家族”凭借深厚的技术积累早已确立领先地位。然而,当我们将视线转向日常生活,服务型机器人的发展历程则相对短暂,面临的挑战也更为复杂多元。
以烹饪场景为例,厨房作业的复杂性远超结构化工业流水线。火候的精准控制、食材的千变万化,这些高度依赖人类直觉与经验的环节,使得烹饪机器人的研发长期面临瓶颈。但变革正在发生。回顾2022年北京冬奥会,智慧餐厅内的烹饪机器人已能娴熟烹制各类中西菜肴。行业分析数据同样预示强劲增长:预计到2026年,全球烹饪机器人设备市场规模将突破1亿美元,年均复合增长率保持在20%左右。
这一技术突破的背后,大语言模型(LLM)扮演了关键角色。它为人机交互带来了范式革新。随着模型参数、训练数据与算力的大幅提升,大模型不仅提升了自然语言理解与生成能力,更展现出“涌现能力”——包括上下文学习、指令遵循与逻辑推理。这些能力使其成为机器人任务规划研究中一项强大的新工具。
南佛罗里达大学孙宇教授在机器人领域拥有超过二十年研究经验,其领导的机器人感知与行为实验室(RPAL)长期致力于让机器人理解并执行复杂指令。团队早在2015年便开始探索知识图谱在任务规划中的应用。自去年起,他们重点研究将大语言模型集成于烹饪机器人规划系统,相关成果已发表于国际期刊《人工智能与机器人研究》(IJAIRR)。
基于知识网络的机器人任务规划方法
机器人任务规划,本质上是为机器人制定一系列动作序列,使其能在动态环境中安全、高效且准确地完成目标。这需要综合考量机器人本体能力、任务目标与环境约束,例如路径避障、工序优化以及行为可解释性等。
孙宇教授团队的核心基础是一个名为“面向功能对象网络”(FOON)的知识图谱系统。该系统如同机器人的“烹饪大脑”,通过分析网络视频与文本资料,学习并存储各类食材、厨具的功能属性与操作关联。经过人工校验与标注,FOON能提供高可靠性的任务规划。对于已知任务,它能给出完全正确的方案;对于相似任务,也能保证高度可信的结果。
然而,知识库的覆盖范围终究有限。当遇到完全超出FOON知识范畴的创新性任务时,这一封闭系统便可能失效。这正是传统知识网络面临的普遍局限,而大语言模型的出现,为解决该问题提供了新的思路。

如何实现知识库外的创新任务规划?
那么,烹饪机器人该如何完成一项知识库中从未记录的任务?孙宇教授与Sadman Sakib博士的研究提出了创新方案:融合大语言模型的创造性联想与知识网络的结构化可靠性,实现优势互补。
该方法的核心流程如下:当用户输入烹饪指令后,研究团队通过精心构建的提示词,引导GPT-4生成多个不同的高级任务规划方案,并以“任务树”形式呈现。每棵树代表一种可能的执行路径,它们在资源消耗、步骤并行度与操作风险上各有差异。
随后,利用一个“图合并算法”将这些任务树融合为统一网络。通过对比分析,系统会自动剔除不合理部分(如成本过高的步骤),并将筛选后正确、高效的组件重新整合,最终输出一个优化后的解决方案。这一过程显著提升了规划的准确性与执行效率。
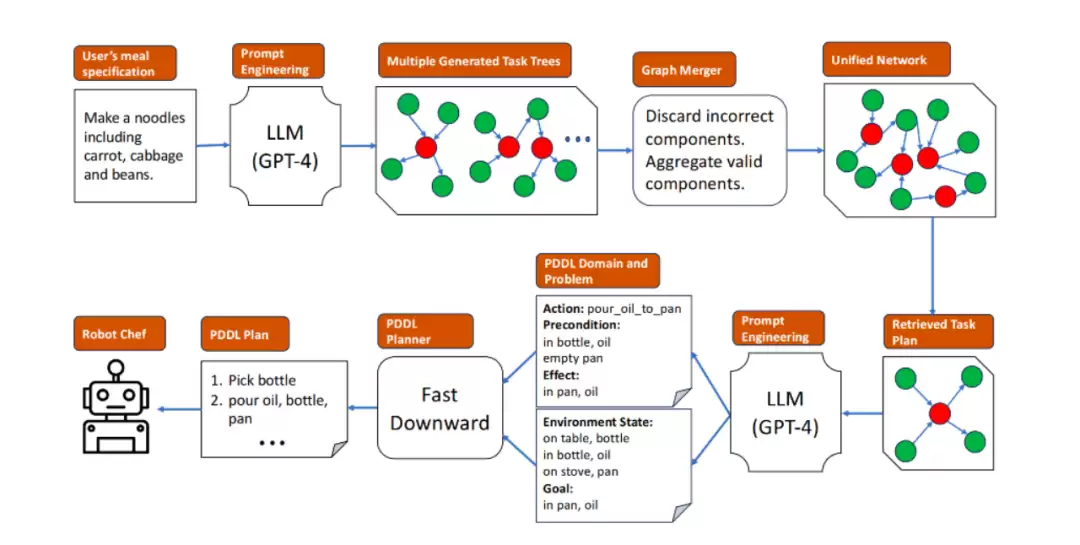
当然,机器人无法直接理解高级语义指令。此时,GPT-4还需承担“翻译器”的职责,将自然语言描述的最优计划,转化为用PDDL(规划领域定义语言)描述的低级可执行动作序列,从而将“制作一碗面”这样的抽象指令,分解为“抓取酱油瓶”、“向锅中倒入食用油”等机器人可执行的具体动作。
尤为值得一提的是,该研究还发现了合并任务树的衍生价值。当将多个菜谱对应的任务树合并成一个综合网络时,不同菜系的烹饪步骤与技巧相互交融,竟能衍生出全新的菜品制作流程。这意味着,该系统不仅能够复现经典菜肴,更具备创造新颖菜品的潜力,为烹饪创新提供了技术可能。
大语言模型与知识网络的协同互补
本质上,大语言模型与FOON知识网络形成了完美的能力互补。以GPT-4为代表的大模型,能够从开放互联网中汲取海量信息,生成富有想象力的任务规划,但其输出结果未经严格验证,准确性难以保证。而FOON中的规划树经过人工标注与校验,正确率可达100%,但知识覆盖面有限。
因此,一个高效的协作模式应运而生:首先利用大语言模型生成多个(可能包含错误的)任务树草案;随后借助FOON的结构化知识对其进行合并、验证与修正,剔除错误的功能单元,并以已验证的正确单元替代。从而在拓展创新边界的同时,确保了规划结果的可靠性。

该方法具备良好的泛化性能,其应用价值不仅限于厨房机器人。经过少量适配或无需调整,它即可为多种工作场景下的机器人(如清洁、物流、护理机器人)生成高效任务计划。
当然,挑战依然存在。当前机器人任务规划研究仍需解决执行失败时的自主纠错问题。当规划出现偏差或系统发生故障时,如何让机器人自主调整策略、回归正轨,是下一步的关键研究方向。孙宇教授团队未来将更注重环境反馈机制,尝试让机器人结合视觉传感与大语言模型,实时感知并更新环境状态,从而减少人工干预,实现更高层级的自主智能。
相关攻略

《ARCRaiders》的“FrozenTrail”更新将揭示Arc机器人的起源。游戏背景与开发商另一作品《终极角逐》存在诸多隐秘关联,如共享虚构公司标志、彩蛋式视觉元素及意大利语涂鸦细节。推测两者处于同一世界观,《终极角逐》设定于2100年,而《ARCRaiders》则在2180年,后者描绘了精英阶层逃离地球后的末日景象。Arc机器人由人类制造,可能被逃离

在医疗数字化转型的浪潮中,病历归档与数据录入的自动化技术,正深刻重塑医院的核心工作流程。它通过智能模拟人工操作,高效处理海量、多源的病历信息,不仅实现了工作效率的指数级提升,更在数据准确性与一致性上带来了革命性的改善。其背后的技术逻辑与为医院创造的核心价值,值得我们深入剖析。 一、核心功能 自动化系

在财务审计工作中,风险与异常检测是保障企业财务健康的关键环节,其过程往往耗时耗力。随着RPA(机器人流程自动化)技术的成熟应用,这一核心任务正经历着深刻的变革,实现了效率与精准度的双重飞跃。本文将深入探讨RPA在审计风险检测中的具体应用路径,并解析其相较于传统人工方法所展现出的显著优势。 一、RPA

说起网络爬虫,很多人觉得神秘,其实它的工作原理并不复杂。简单来说,就是模拟人的浏览行为,自动从网上抓取信息。整个过程,可以拆解成几个清晰的核心步骤。 一、基本工作原理 整个过程始于一次“敲门”。爬虫通过HTTP库向目标网站发送一个请求,也就是一个包含了必要信息的Request对象。为了让请求看起来更

在数据驱动的业务环境中,从海量表格中精准提取特定信息是一项高频且繁琐的任务。传统人工操作不仅效率低下,还容易因疲劳或疏忽导致错误。如今,借助机器人流程自动化(RPA)技术,这类重复性工作完全可以交由“数字员工”高效、准确地完成。本文将以实在RPA为例,详细拆解如何从表格中提取对应项数据的完整落地步骤
热门专题







热门推荐

钉钉文档官网 在探讨企业级协同办公解决方案时,钉钉文档无疑是备受瞩目的核心工具之一。作为阿里巴巴钉钉官方推出的旗舰级应用套件,它深度融合了在线文档编辑、智能表格、思维导图等多种高效创作工具。其核心优势在于与钉钉平台生态的无缝衔接,能够直接同步企业内部组织架构与通讯录,实现团队成员间的即时协作与信息流

在数字化转型浪潮中,高效、易用的数据分析工具已成为企业提升决策效率的关键。商汤科技推出的“办公小浣熊”智能助手,正是基于自研大语言模型打造的一款创新产品,旨在彻底降低数据分析的技术门槛。用户无需掌握编程知识或复杂操作,即可通过自然对话完成从数据查询、处理到可视化洞察的全流程,让数据价值触手可及。 办

在人工智能技术快速发展的今天,MiniMax作为一家专注于全栈自研的AI公司,正以其独特的技术路径和前瞻性的布局,在业界脱颖而出。公司致力于构建覆盖文本、图像、语音和视频的新一代多模态智能模型矩阵,这不仅体现了对核心底层技术自主权的深度掌控,也展现了对未来人机交互与内容生成形态的前瞻思考。 那么,M

ApolloCreditFund(ACRED)作为连接传统信贷与DeFi的桥梁,其价格受市场情绪、协议基本面及宏观环境影响。其价值逻辑根植于现实世界资产(RWA)的收益捕获与链上流动性释放。短期价格波动难以预测,但长期发展取决于信贷资产质量、协议安全性和市场采用度。投资者需关注其底层资产表现、代币经济模型及整个RWA赛道的发展趋势。

在数字化转型浪潮中,一套能够深度适配业务、彰显品牌特色的智能客服系统,已成为企业提升服务效率与用户体验的关键工具。然而,市场上许多解决方案往往模式固化,难以满足个性化需求。如何让AI客服不仅具备基础的自动化应答能力,更能承载独特的品牌文化与服务哲学?其核心在于系统是否支持深度的自定义与持续的AI训练