5月13日,小米在自动驾驶技术领域取得重要突破,正式发布并开源了其创新的多模态大模型——Xiaomi OneVL。此次发布并非简单的版本迭代,而是标志着小米在技术架构上实现了一次关键的“范式融合”,旨在以更统一的框架解决自动驾驶的核心认知难题。
那么,Xiaomi OneVL究竟解决了什么问题?它直面自动驾驶系统开发中的一个核心挑战:如何让AI模型同时具备精准的实时环境理解能力与可靠的未来场景推演能力。传统方案通常采用分立架构:视觉语言动作模型负责即时感知与决策,类似于驾驶员的瞬间反应;而世界模型则专注于模拟物理规律,预测未来数秒内的环境变化,如同经验丰富的司机对路况的前瞻判断。两者功能互补,但在架构与数据流转上往往存在隔阂。
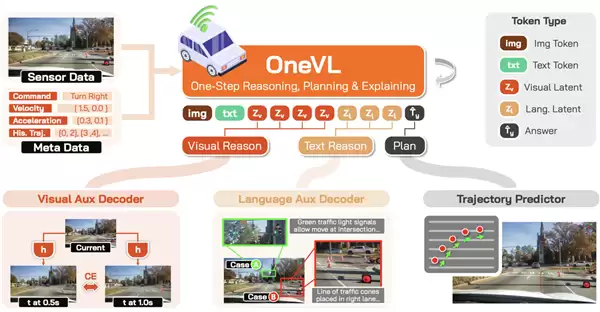
Xiaomi OneVL的创新思路在于,尝试将这两条技术路线融合到一个统一的框架内。其核心技术答案是“潜空间推理”。通过这项前沿技术,模型能够将高维、复杂的动态驾驶场景信息进行高效压缩与表征,在一个统一的潜空间内同步完成环境感知、逻辑推理与轨迹规划。这意味着,信息处理流程得以简化,减少了模块间冗余的数据转换与传递,从而在理论上显著提升了系统整体的决策效率与协同性能。
这一统一框架的实际效能如何?多项权威基准测试数据提供了有力佐证。在覆盖感知、推理与规划的综合性评测中,Xiaomi OneVL展现了卓越的性能。
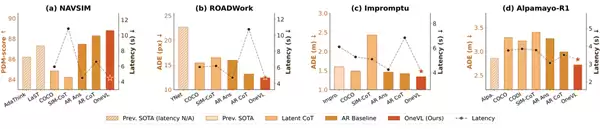
公开数据显示,该模型在ROADWork、Impromptu、Alpamayo-R1等多个国际主流自动驾驶基准测试中,均取得了当前最优的性能评级。尤其在NA VSIM基准上,其PDM-score达到了88.84的高分。这一成绩颇具里程碑意义——它首次证明了基于潜空间推理的隐式方法,在关键指标上能够超越需要逐步显式推理的思维链方法。可以说,Xiaomi OneVL是目前首个在全部测试集上全面领先于传统自回归CoT方法的隐式推理模型。
对于追求实时性的车载部署而言,推理速度与精度同等重要。技术报告指出,通过采用MLP回归头变体进行优化,模型单次推理延迟可降低至0.24秒,对应高达4.16 Hz的推理频率。这一延迟水平仅为传统VLA自回归推理耗时的5.4%。如此大幅度的延迟优化,为在量产车规级芯片上实现高性能、低延时的实时自动驾驶决策扫清了关键障碍。相关的消融实验也进一步验证,对物理世界动态进行有效的压缩表征,是带来性能显著提升的关键因素。
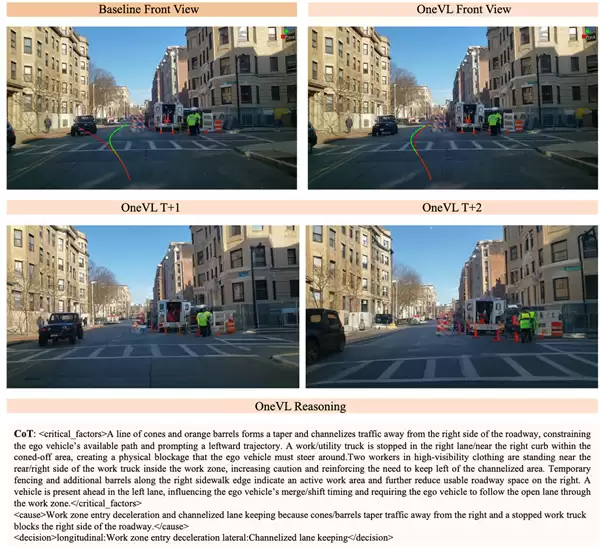
当然,一个可靠的自动驾驶系统不仅需要强大的性能,其决策过程还必须具备可解释性与可信度。Xiaomi OneVL在此方面提供了双重保障机制:它既能通过自然语言生成清晰的决策依据,例如解释“为何在此刻选择变道或减速”;也能输出直观的未来场景视觉预测,展示模型对“接下来几秒交通环境可能如何演变”的推演结果。这种“语言解释”与“视觉推演”相结合的能力,极大地增强了模型行为的透明度,有助于研发人员深度调试并提升用户对AI驾驶的信任感。
总体而言,Xiaomi OneVL的开源,其价值远不止于发布一个高性能模型。它更重要的意义在于,为行业探索下一代自动驾驶感知决策架构提供了一个重要的技术样本与整合路径。将VLA与世界模型统一于潜空间推理框架之下,这一技术方向能否成为未来主流,仍需经过大规模实际场景的验证与迭代。但毫无疑问,小米的此次开源为全球自动驾驶社区带来了一个极具探讨价值与启发性的新思路。




