多模态人工智能领域迎来重大突破,Google DeepMind 正式开源其新一代视觉-语言模型 TIPSv2。该模型通过一系列创新架构设计,在零样本语义分割、图像-文本检索等核心任务上刷新了多项性能记录,为密集视觉-语言对齐设立了新的技术标杆。本文将深入解析其技术原理、核心优势与应用前景。
TIPSv2 的核心突破在于实现了图像局部区域(Patch)与文本描述之间的高精度“密集对齐”。这一能力是达成高质量零样本视觉理解任务的关键基础。为实现这一目标,研究团队融合了三大关键技术模块,显著提升了模型对复杂视觉场景的语义解析能力。
TIPSv2的主要功能
该模型具备全面的多模态理解与生成能力,覆盖了当前视觉-语言交互的主流应用场景:
- 零样本语义分割:无需针对特定类别进行训练,仅凭自然语言指令(例如“找出图像中所有行人”)即可精确分割出对应物体轮廓。
- 图像-文本检索:支持双向跨模态检索,既能通过文本查询匹配图像,也能依据图像内容搜索相关文字描述。
- 零样本图像分类:在 ImageNet 等标准分类数据集上,直接通过文本嵌入匹配完成分类,无需进行任务特定的微调。
- 深度与法向量预测:利用其强大的 Patch 级特征表示,可同时估计场景的深度信息与物体表面法线方向。
- 特征可视化:支持生成图像 Patch 嵌入的 PCA 降维可视化图谱,直观展示模型对不同图像区域的语义理解分布。
TIPSv2的技术原理
模型卓越性能的背后,是四项关键的技术创新:
- iBOT++ 自蒸馏框架:作为原有 iBOT 方法的升级版,它将 Patch 级别的自蒸馏损失扩展至所有视觉 Token,强制学生模型对齐教师模型的全套 Patch 表示。该策略在 ADE150 数据集上将零样本分割性能提升了 14.1 个 mIoU。
- Head-only EMA 高效训练:为提升训练效率,团队创新性地仅对模型末端的投影头(Projection Head)应用指数移动平均更新,主干网络则保持常规训练。此策略减少了 42% 的 EMA 参数更新量,大幅降低了训练内存开销。
- 多粒度文本增强策略:采用双模型文本生成方案,结合 PaliGemma 生成的密集区域描述与 Gemini Flash 生成的全局深度描述。训练时随机交替使用不同粒度的文本,极大增强了模型对多样化语言描述的鲁棒性。
- 对比学习与自监督联合优化:模型采用多任务联合训练范式,同步接收文本监督信号与自监督信号,成功解锁了骨干网络进行密集图文对齐的内在能力。
TIPSv2的关键信息和使用要求
对于希望快速部署与实验的研究者与开发者,以下是关键信息:
- 研发团队:由 Google DeepMind 团队主导,论文主要作者包括 Bingyi Cao、Koert Chen 和 André Araujo。
- 开源范围:本次开源极为全面,发布了从 8600 万到 110 亿参数的四种规格预训练模型,并提供 PyTorch 与 JAX/Scenic 双框架代码。同时,Hugging Face 平台提供了在线演示与 Colab 笔记本。
- 运行环境:需要 Python 3.11 及以上版本,并可根据需求选择 PyTorch 或 JAX/Scenic 作为计算后端。
- 依赖安装:核心依赖库包括 torch、torchvision、tensorflow_text 及 scikit-learn 等。
TIPSv2的核心优势
与现有主流视觉-语言模型相比,TIPSv2 在多个维度展现出显著优势:
- Patch-文本对齐能力领先:在 ADE150、PASCAL VOC 等四个主流分割基准测试中均取得领先。其零样本分割流程简洁,仅需最大化余弦相似度即可获得更高 mIoU,无需复杂后处理。
- 卓越的参数效率:得益于 Head-only EMA 策略,训练内存占用大幅降低。通过知识蒸馏,较小规模的 TIPSv2 模型甚至在密集对齐任务上能超越更大的教师模型。
- 突出的训练性价比:数据对比显示,参数量更少、训练数据量也更低的 TIPSv2-g 模型,在 5 项评测中的 3 项上超越了参数量多 56%、数据量多 47 倍的 PE-core 模型。而 TIPSv2-L 则在 6 项评测中的 4 项上,胜过了参数多 6 倍、数据多 15 倍的 DINOv3-L。
- 全面的任务通用性:模型能力均衡,在密集对齐(分割)、全局对齐(检索/分类)及纯视觉任务(深度/法向量估计)三大维度上均表现优异,在 9 项任务、20 个数据集中具备强大竞争力。
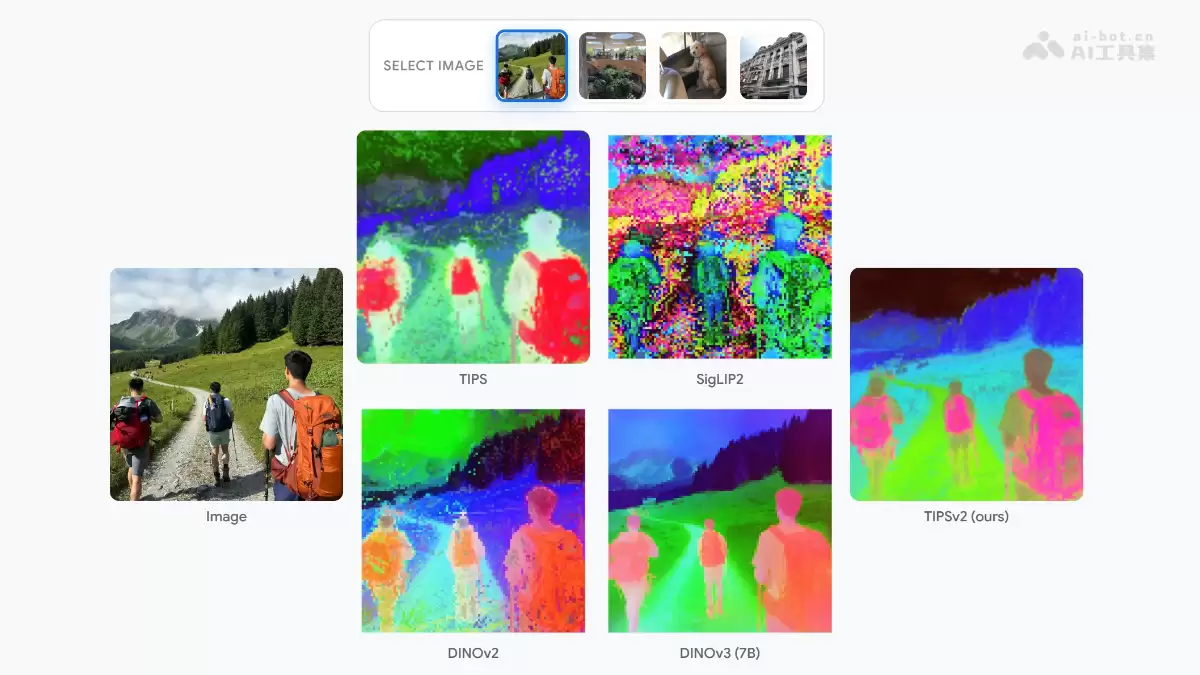
- 清晰可解释的特征表示:通过 PCA 可视化对比可见,其 Patch 嵌入比 SigLIP2、DINOv3 等模型的结果更平滑,能更好地保留物体边界与语义细节。
TIPSv2的项目地址
所有相关资源均已在以下平台开放:
- 项目官网:https://gdm-tipsv2.github.io/
- GitHub仓库:https://github.com/google-deepmind/tips
- HuggingFace模型库:https://huggingface.co/collections/google/tipsv2
- arXiv技术论文:https://arxiv.org/pdf/2604.12012
TIPSv2的同类竞品对比
| 维度 | TIPSv2 | DINOv3 | SILC |
|---|---|---|---|
| 机构 | Google DeepMind | Meta | 多机构 |
| 核心机制 | iBOT++ + 对比学习 + 多粒度 Caption | 纯自监督(DINO + iBOT) | 对比学习 + 掩码语言 |
| 文本监督 | 多粒度合成 Caption | 无 | 单粒度 |
| 零样本分割 | 直接余弦相似度,无需后处理 | 需滑动窗口协议辅助 | 依赖 TCL 滑动窗口协议 |
| 参数效率 | 高(Head-only EMA 省 42% 内存) | 低(全模型 EMA,大数据量) | 中等 |
| Patch-文本对齐 | SOTA | 弱(无文本对齐) | 较强但需复杂协议 |
TIPSv2的应用场景
凭借其强大的零样本理解与密集视觉对齐能力,TIPSv2 在多个行业具有广阔的应用潜力:
- 自动驾驶与机器人:实时解析复杂动态环境,通过自然语言指令零样本分割出行人、车辆、可行驶区域等,降低对海量标注数据的依赖。
- 电商搜索与内容风控:利用其高精度图像-文本双向检索能力,实现更精准的商品以图搜图、以文搜图,并辅助识别违规图像内容。
- 智能医疗影像分析:辅助医生通过自然语言描述(如“定位右下肺叶的磨玻璃结节”)快速定位病灶区域,有望大幅降低医学影像标注成本。
- 具身智能与交互机器人:使机器人能够理解“请把桌子上的蓝色马克杯拿过来”等复杂指令,并在真实环境中完成视觉定位与抓取。
- 人工智能可解释性研究:其提供的特征可视化工具,为研究人员探索多模态模型的内部工作机制与决策逻辑提供了重要窗口。




