OpenClaw 不会安装的,一键安装包来了,代码开源!
简化OpenClaw安装流程:ClawDo实现一键部署,告别复杂配置
许多用户体验OpenClaw时,往往在第一步安装环节就遇到了难题。手动配置Node.js环境、输入复杂的命令行指令,这些繁琐步骤让很多初学者望而却步。我们收到大量用户反馈,询问是否有更简单、更适合新手的解决方案。
一款优秀工具的核心价值,在于极大地降低用户的使用门槛。为了彻底解决OpenClaw安装难题,我们深度优化并封装了整个部署流程,最终推出「ClawDo」——一款专为OpenClaw设计的一键式安装与管理工具。
一、ClawDo:您的OpenClaw专属部署助手
简单来说,ClawDo致力于将OpenClaw AI客户端的安装、配置和维护工作变得极其简单。它通过直观的交互式界面,引导用户完成所有步骤,将原本专业的命令行操作,转化为轻松的点选和确认。
二、ClawDo核心功能详解
ClawDo的设计覆盖了从初次部署到日常运维的全流程:
- 一键安装与更新:自动检测并获取OpenClaw最新版本,无需手动查找下载源。
- 便捷服务管理:轻松重启或管理OpenClaw Gateway服务,保障应用稳定运行。
- 集成配置管理:可直接在新窗口中启动OpenClaw的图形化配置向导,方便设置。
- 彻底卸载清理:提供完整卸载选项,移除所有相关文件,系统不留残余。
- 全平台兼容支持:完美支持Windows、macOS及Linux三大操作系统,体验一致。
- 友好直观的界面:采用彩色文字与清晰的交互菜单,操作指引明确,体验流畅易懂。
三、ClawDo的技术实现方案
为了实现高效稳定的一键式体验,ClawDo在技术层面进行了多项优化:
- 基于Node.js开发,确保了优异的跨平台兼容性与执行效率。
- 使用inquirer库构建灵活的命令行交互界面,提升用户操作体验。
- 借助chalk和figlet等工具美化终端输出,增强视觉友好度。
- 全面采用异步操作与现代ES6+特性,保证程序响应迅速。
- 最终通过pkg工具将应用打包为独立可执行文件,实现真正的下载即用,无需配置环境。
四、ClawDo操作界面预览
百闻不如一见,通过以下截图可以直观感受ClawDo简洁流畅的一键式操作。
1、清晰明了的主功能菜单
启动ClawDo后,所有核心功能以清晰的菜单形式列出,用户只需根据提示选择对应数字即可。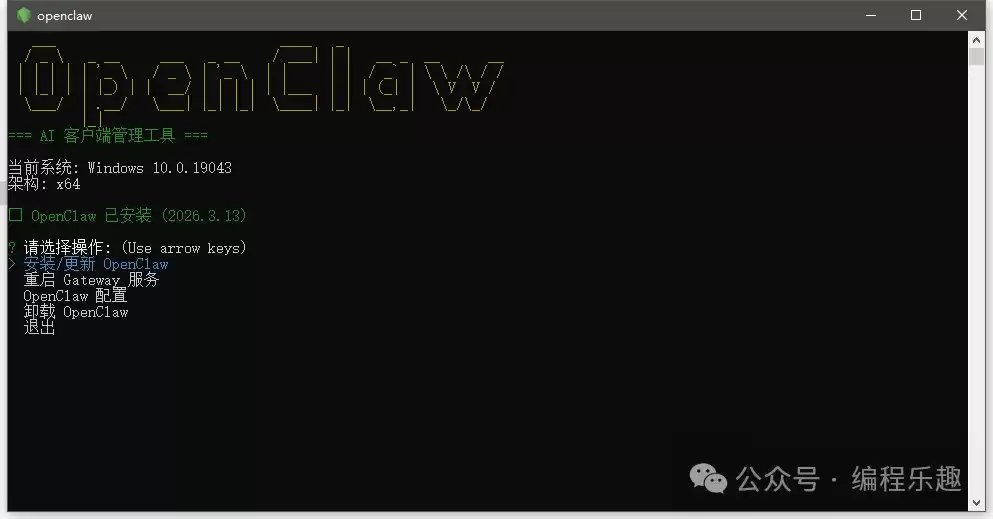
2、全自动化的智能安装流程
选择安装选项后,工具会自动执行环境检测、版本下载、依赖配置等一系列操作,用户只需静待完成。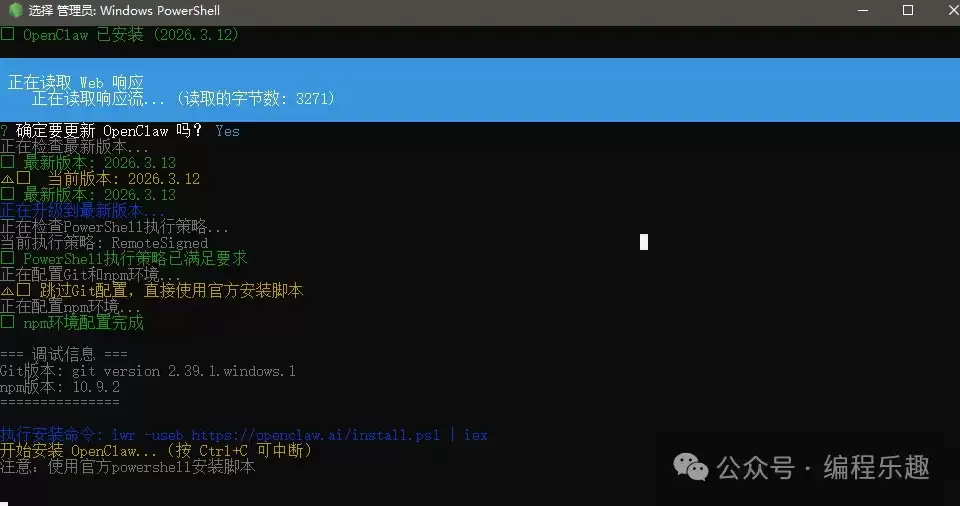
3、安装成功提示与快捷启动
安装成功后,ClawDo会给出明确提示,并可选择直接在默认浏览器中打开OpenClaw Web界面。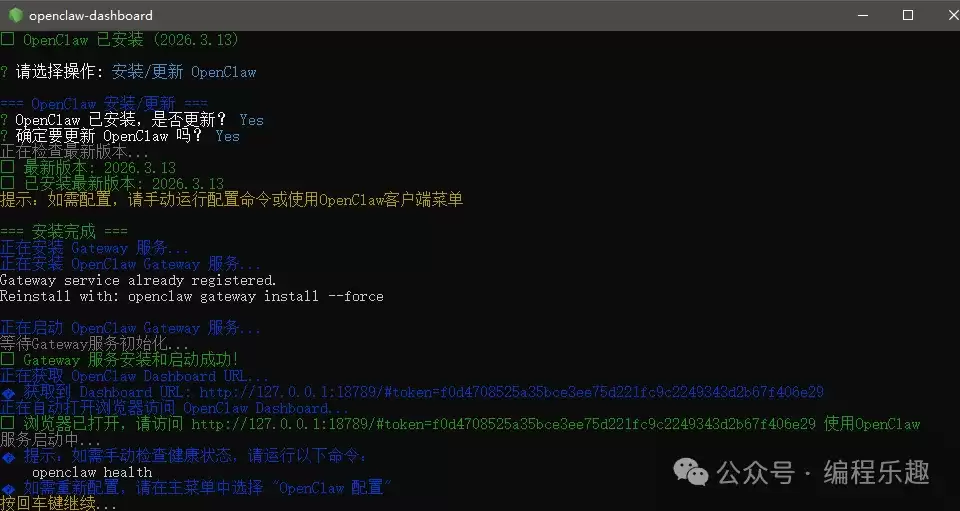
五、如何获取与使用ClawDo
ClawDo已在Github上完全开源,所有代码公开透明,欢迎开发者查阅、使用或贡献代码。如果您觉得这个工具很有帮助,别忘了给项目点个Star支持我们的持续开发。
开源项目地址:https://github.com/bianchenglequ/ClawDo
同时,我们也为希望立即体验的用户提供了打包好的可直接运行版本,无需安装Node.js等任何前置环境,真正做到下载后双击即可使用。
可执行文件网盘下载链接:https://pan.quark.cn/s/cd513ce510b3
- - 本文结束 -
热门专题







热门推荐

机器人行业迎来里程碑式突破。以视频生成模型Vidu著称的生数科技,正式发布了名为Motubrain的“世界动作模型”。这并非一次普通迭代,而是被定位为机器人的“物理大脑”,其核心目标在于:用一个统一的通用模型,彻底取代以往依赖多个专用系统拼凑而成的复杂架构。 正如其“一个大脑,无限可能”的口号所揭示

xAI正式进军AI编程智能体领域,于近日发布了专为软件工程与复杂编程任务设计的Grok Build。 简单来说,Grok Build是一款能在终端里直接跑起来的AI编程助手。它被定位为一个具备智能体能力的命令行工具,开发者用自然语言告诉它要做什么,它就能生成代码,甚至帮你搞定一系列编程和自动化任务。

近日,谷歌对其搜索引擎的核心规则进行了重要更新,此次调整直指当前备受关注的AI搜索领域。具体而言,谷歌在其垃圾内容政策中新增了明确条款,正式将“操纵AI搜索结果”的行为列为违规操作,划定了新的质量红线。 根据权威行业媒体Search Engine Land的报道,本次谷歌算法更新的核心在于,将任何企

硅谷的科技巨头们或许曾以为,自己已经远离了AI数据中心带来的电力压力——毕竟,高昂的地价和电费早就把大型数据中心项目“赶”到了别处。但现实总是出人意料,这场能源危机的涟漪,正悄然涌向他们心爱的度假后院。 没错,说的就是太浩湖。这个湾区精英们钟爱的避世天堂,如今正站在一场电力风暴的边缘。距离它必须找到

这项由高通AI研究院(Qualcomm AI Research)主导的创新研究于2026年5月正式发布,论文预印本编号为arXiv:2605 07721。 研究背景:当AI越想越费内存,我们该怎么办 设想一下,手机导航应用会在出发前规划好整条路线,而一位真正智慧的向导则会边走边思考,遇到路障时灵活应