3月9日消息,南方科技大学机械与能源工程系付成龙教授团队在穿戴式助行机器人领域取得新突破。相关成果已在今年2月被机器人领域权威期刊《International Journal of Robotics Research》(简称IJRR)正式刊发。

负重行走是军事作业、应急搜救及日常生活中的常见活动。然而,长时间的高强度负重不仅会让人体代谢急剧上升、作业效率下降,还极易引发肌肉与骨骼损伤等健康风险。目前主流的外骨骼式助行机器人,其助力方向与人体行进方向间存在较大夹角,助力效率较低。与背负同等重量的传统方式相比,人体代谢率仅能降低约10%,效果有限。
为突破外骨骼助力形式的局限性,付成龙团队原创性地提出了一种穿戴式半人马负重助行机器人。该机器人通过独特的软化弹性耦合机构,结合人机协同控制策略,兼具高负载能力与高运动灵活性,实现了助力与平衡的动态解耦。
实验验证表明,该机器人可使人体的行走代谢成本显著降低高达35%,为负重助行提供了全新的高效解决方案。
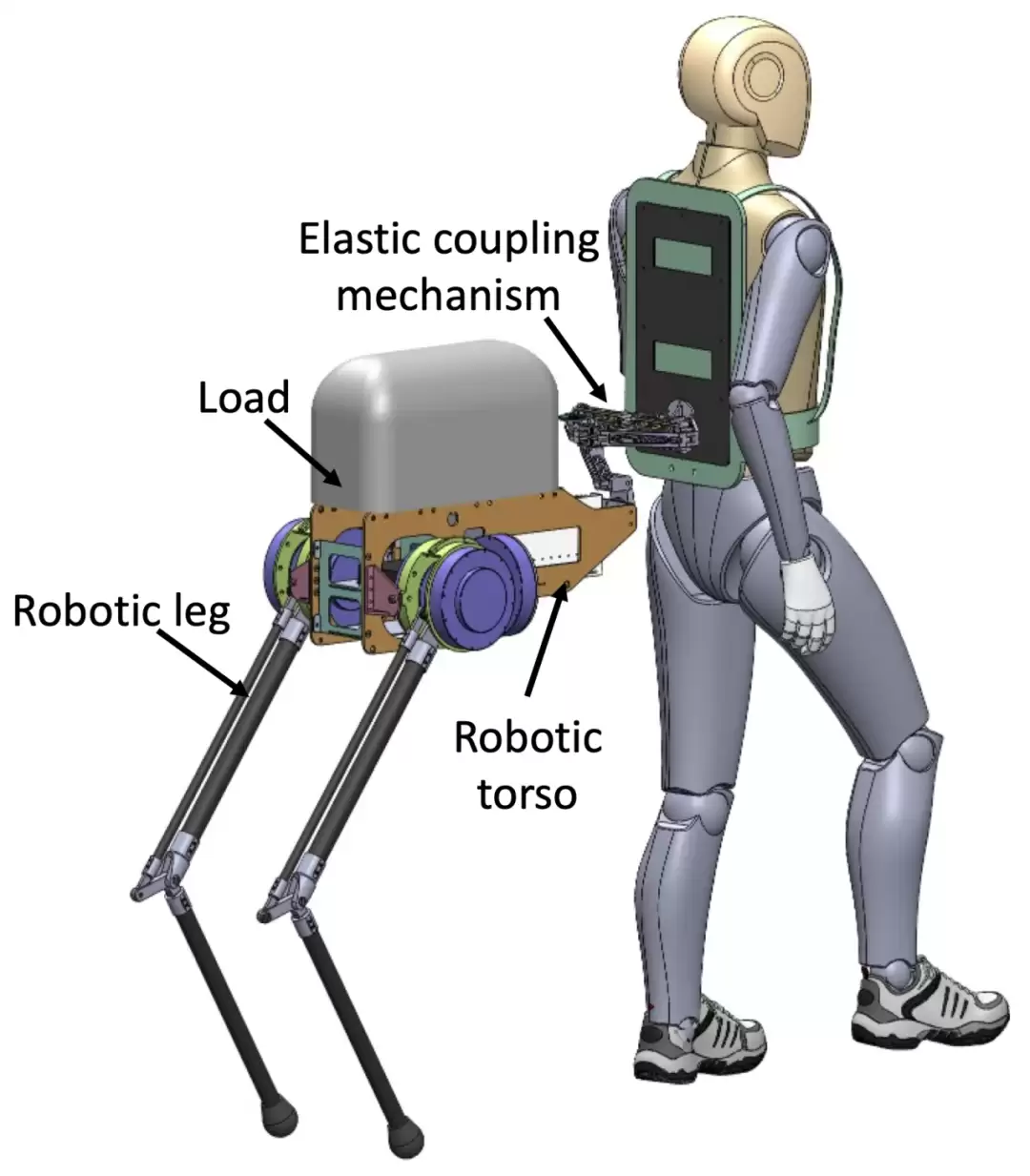
研究团队从自然界四足动物的负重形态中汲取灵感,提出了一种全新的人机协作模式:机器人不再与人体双腿刚性并联,而是作为一个独立的肢体,借助穿戴式弹性耦合接口与人体背部柔性连接。这种构型构建了“人类智能导航+机器人力量负重”的人机混合四足系统,既保留了人类在复杂环境下的导航决策能力,又充分发挥了机器人分担重量并提供高效行进方向推力的作用。
为解决人机之间复杂的动力学耦合难题,团队设计了基于菱形连杆与拮抗弹簧的“软化弹性耦合机构”。该机构具备非线性刚度特性,即在作用力小时刚度大、响应快,在作用力大时刚度小、缓冲强。这一设计实现了人机动力的动态解耦,使机器人能够像独立个体一样稳定控制,同时通过接口精准输出助力。
结合所提出的“行走-交互协同控制框架”,半人马机器人能够实时感知人体运动意图,在无需人工指令的情况下实现高精度全向跟随运动,并在维持自身平衡的同时,为使用者提供稳定的水平行进推力。
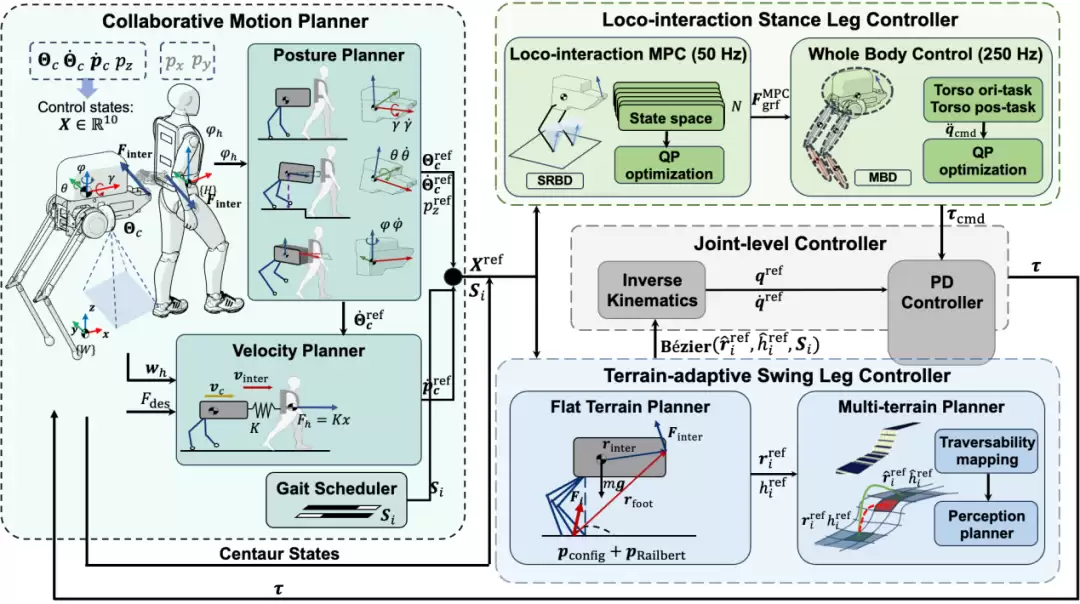
▲ 半人马人机行走-交互协同控制策略框架
基于所提出的半人马系统,研究团队开展了多维度的综合实验验证。在机动性方面,机器人展现了卓越的灵活性与良好的地形适应能力,不仅能在1米狭窄空间内连续完成“8”字绕桩,还能利用视觉感知自主规划策略,顺利通过台阶、斜坡及户外复杂路面。

▲ 半人马机器人在真实环境下行走,为多位受试者提供助力辅助

在负重效能方面,人体实验数据表明:相比于背负20公斤重物(约占体重29%)的情况,穿戴半人马机器人并在具备水平助力条件下,人体净代谢成本显著降低了35%,足底压力减少了52%。
此外,步态分析结果显示,受试者穿戴该机器人后,步宽变异性显著降低,其稳定性指标与零负载空载行走无显著差异。这表明半人马人机四足构型能有效缓解负重力对人体带来的行走扰动,并进一步提升负重行走的侧向稳定性,充分验证了“垂直负载分担+水平质心助力”复合助力范式的高效能优势。
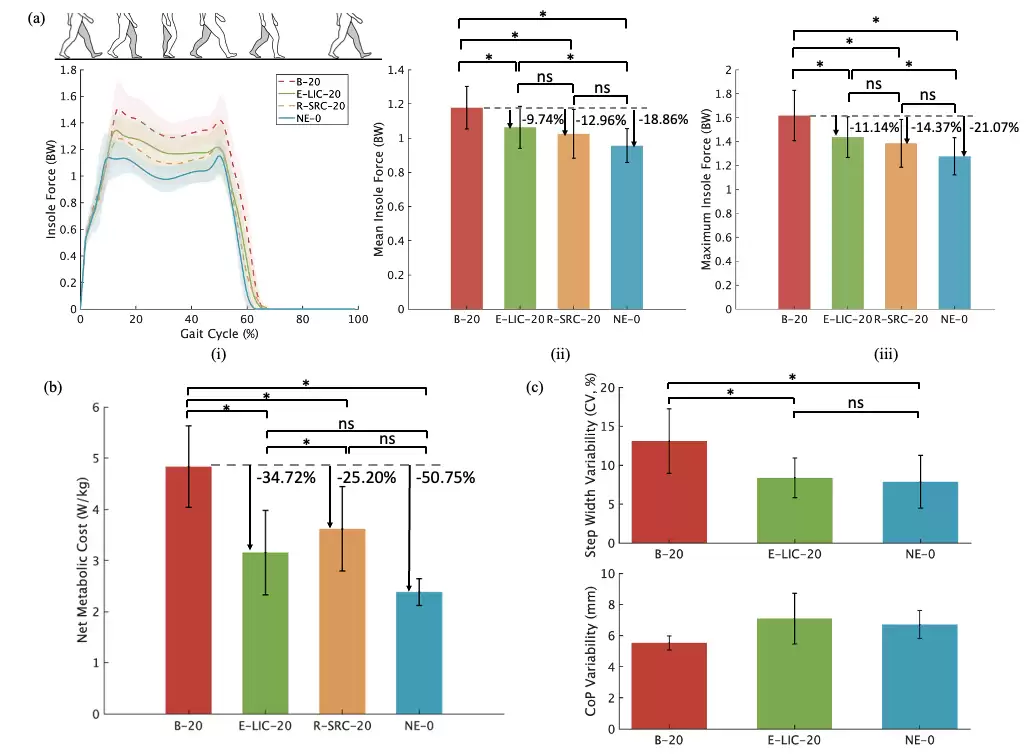
▲ 半人马人机系统负重行走实验结果
南方科技大学机械与能源工程系博士生涂志鑫和江羿豪为论文共同第一作者,付成龙为论文唯一通讯作者,南方科技大学为论文唯一署名单位。该研究得到了国家自然科学基金联合基金重点项目、教育部联合基金创新团队、深圳市科技创新局及南方科技大学高水平专项资金的资助支持。
IT之家附论文链接:




