【CVPRW 2026】MobileViG:用于移动视觉应用的基于图的稀疏注意力
该代码复现了MobileViG模型,这是一种混合CNN-GNN架构。代码先下载导入库,创建并处理Cifar10数据集,接着实现标签平滑、DropPath等组件,构建Stem、MLP等模块及MobileViG模型,还定义了不同规模模型。之后进行训练、结果分析,包括绘制学习曲线、计算吞吐量和展示预测结果等。

MobileViG:用于移动视觉应用的基于图的稀疏注意力
摘要
传统上,卷积神经网络(CNN)和视觉变换器(ViT)主导了计算机视觉。 然而,最近提出的视觉图神经网络(ViG)提供了一种新的探索途径。 不幸的是,对于移动应用程序来说,由于将图像表示为图形结构的开销,ViG 的计算成本很高。 在这项工作中,我们提出了一种新的基于图的稀疏注意力机制,即稀疏视觉图注意力(SVGA),它是为在移动设备上运行的 ViG 设计的。 此外,我们提出了第一个用于移动设备视觉任务的混合 CNN-GNN 架构 MobileViG,它使用 SVGA。 大量实验表明,MobileViG 在图像分类、对象检测和实例分割任务的准确性和/或速度方面击败了现有的 ViG 模型以及现有的移动 CNN 和 ViT 架构。 我们最快的模型 MobileViG-Ti 在 ImageNet-1K 上实现了 75.7% 的 top-1 准确率,在 iPhone 13 Mini NPU(用 CoreML 编译)上的推理延迟为 0.78 毫秒,这比 MobileNetV2x1.4 更快(1.02 毫秒,74.7% top-1) 1) 和 MobileNetV2x1.0(0.81 毫秒,71.8% top-1)。 我们最大的模型 MobileViG-B 获得了 82.6% 的 top-1 准确率,延迟仅为 2.30 毫秒,比类似大小的 EfficientFormer-L3 模型(2.77 毫秒,82.4%)更快、更准确。 我们的工作证明,精心设计的混合 CNN-GNN 架构可以成为设计在移动设备上极其快速和准确的模型的新探索途径。
1. MobileViG
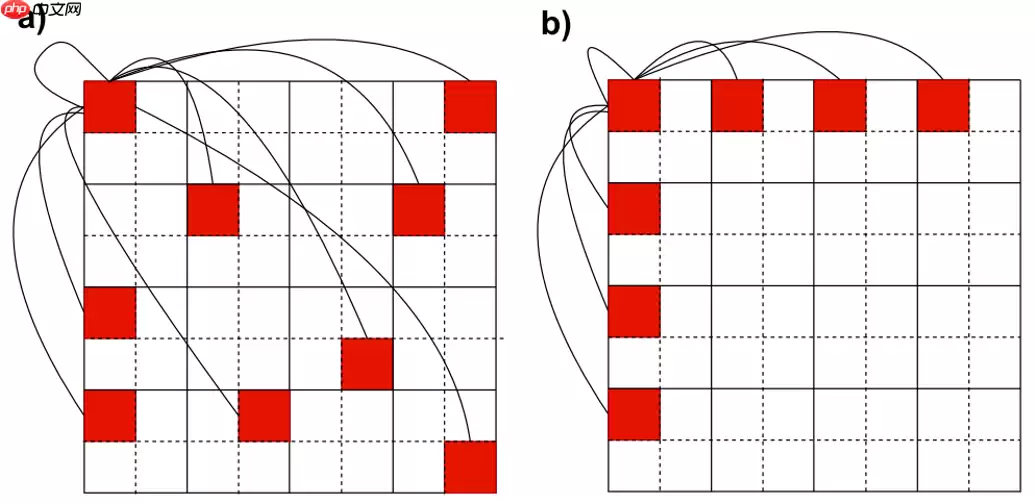
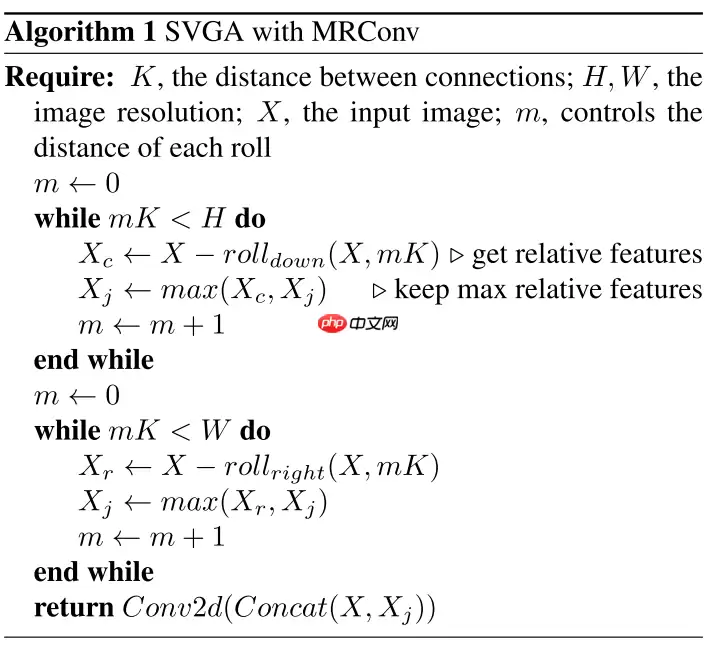
1.1 Sparse Vision Graph Attention(SVGA)
基于 KNN 的图注意力引入了两个不适合移动设备的组件:KNN 计算和输入整形,本文用 SVGA 删除了它们,并沿行和列跨k个Token进行采样,从而构建图来进行学习。为了避免reshape带来的开销,本文提出通过滑动操作来进行图学习,具体实现如算法1所示。
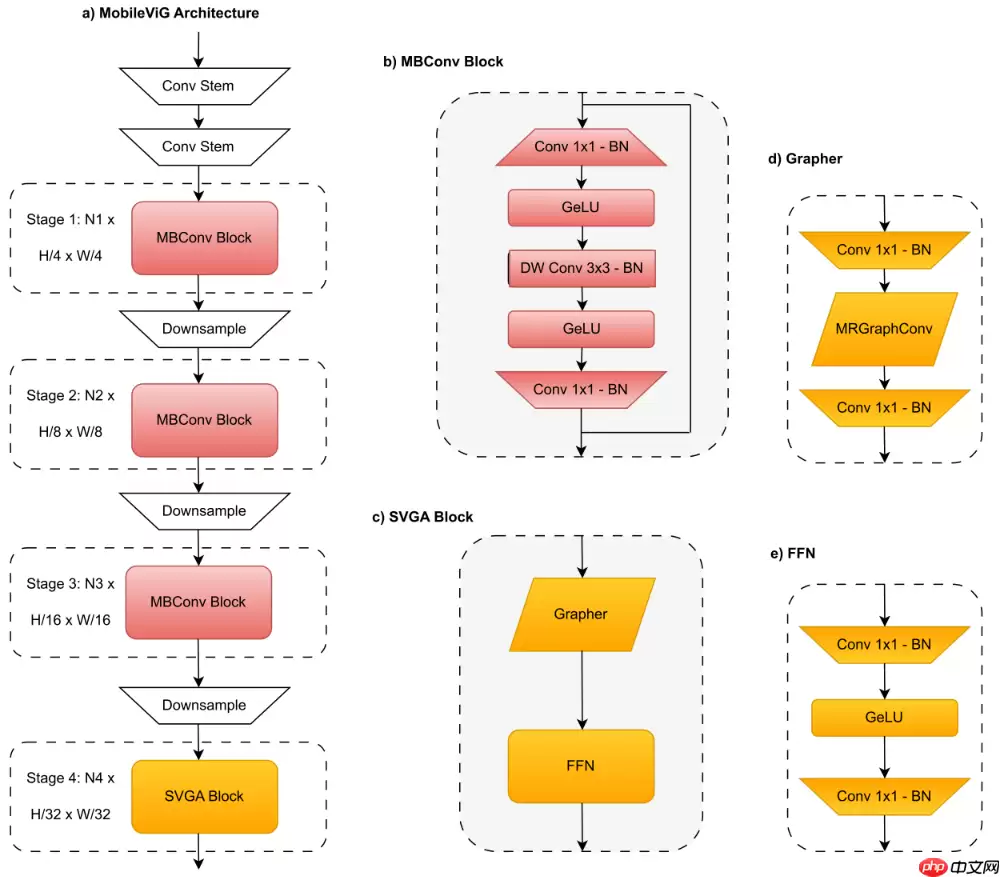
1.2 SVGA Block
跟传统的Transformer架构差不多,SVGA Block分为两个部分:Grapher和FFN
2. 代码复现
2.1 下载并导入所需的库
In [ ]%matplotlib inlineimport paddleimport numpy as npimport matplotlib.pyplot as pltfrom paddle.vision.datasets import Cifar10from paddle.vision.transforms import Transposefrom paddle.io import Dataset, DataLoaderfrom paddle import nnimport paddle.nn.functional as Fimport paddle.vision.transforms as transformsimport osimport matplotlib.pyplot as pltfrom matplotlib.pyplot import figure登录后复制
2.2 创建数据集
In [3]train_tfm = transforms.Compose([ transforms.RandomResizedCrop(224, scale=(0.6, 1.0)), transforms.ColorJitter(brightness=0.2,contrast=0.2, saturation=0.2), transforms.RandomHorizontalFlip(0.5), transforms.RandomRotation(20), transforms.ToTensor(), transforms.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),])test_tfm = transforms.Compose([ transforms.Resize((224, 224)), transforms.ToTensor(), transforms.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),])登录后复制In [4]
paddle.vision.set_image_backend('cv2')# 使用Cifar10数据集train_dataset = Cifar10(data_file='data/data152754/cifar-10-python.tar.gz', mode='train', transform = train_tfm, )val_dataset = Cifar10(data_file='data/data152754/cifar-10-python.tar.gz', mode='test',transform = test_tfm)print("train_dataset: %d" % len(train_dataset))print("val_dataset: %d" % len(val_dataset))登录后复制train_dataset: 50000val_dataset: 10000登录后复制In [5]
batch_size=256登录后复制In [6]
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, drop_last=True, num_workers=4)val_loader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False, drop_last=False, num_workers=4)登录后复制
2.3 模型的创建
2.3.1 标签平滑
In [7]class LabelSmoothingCrossEntropy(nn.Layer): def __init__(self, smoothing=0.1): super().__init__() self.smoothing = smoothing def forward(self, pred, target): confidence = 1. - self.smoothing log_probs = F.log_softmax(pred, axis=-1) idx = paddle.stack([paddle.arange(log_probs.shape[0]), target], axis=1) nll_loss = paddle.gather_nd(-log_probs, index=idx) smooth_loss = paddle.mean(-log_probs, axis=-1) loss = confidence * nll_loss + self.smoothing * smooth_loss return loss.mean()登录后复制
2.3.2 DropPath
In [8]def drop_path(x, drop_prob=0.0, training=False): """ Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks). the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper... See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... """ if drop_prob == 0.0 or not training: return x keep_prob = paddle.to_tensor(1 - drop_prob) shape = (paddle.shape(x)[0],) + (1,) * (x.ndim - 1) random_tensor = keep_prob + paddle.rand(shape, dtype=x.dtype) random_tensor = paddle.floor(random_tensor) # binarize output = x.divide(keep_prob) * random_tensor return outputclass DropPath(nn.Layer): def __init__(self, drop_prob=None): super(DropPath, self).__init__() self.drop_prob = drop_prob def forward(self, x): return drop_path(x, self.drop_prob, self.training)登录后复制
2.3.3 MobileViG模型创建
In [9]class Stem(nn.Layer): def __init__(self, input_dim, output_dim, activation=nn.GELU): super(Stem, self).__init__() self.stem = nn.Sequential( nn.Conv2D(input_dim, output_dim // 2, kernel_size=3, stride=2, padding=1, bias_attr=False), nn.BatchNorm2D(output_dim // 2), nn.GELU(), nn.Conv2D(output_dim // 2, output_dim, kernel_size=3, stride=2, padding=1, bias_attr=False), nn.BatchNorm2D(output_dim), nn.GELU() ) def forward(self, x): return self.stem(x)登录后复制In [10]
class MLP(nn.Layer): """ Implementation of MLP with 1*1 convolutions. Input: tensor with shape [B, C, H, W] """ def __init__(self, in_features, hidden_features=None, out_features=None, drop=0., mid_conv=False): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features self.mid_conv = mid_conv self.fc1 = nn.Conv2D(in_features, hidden_features, 1, bias_attr=False) self.act = nn.GELU() self.fc2 = nn.Conv2D(hidden_features, out_features, 1, bias_attr=False) self.drop = nn.Dropout(drop) if self.mid_conv: self.mid = nn.Conv2D(hidden_features, hidden_features, kernel_size=3, stride=1, padding=1, groups=hidden_features, bias_attr=False) self.mid_norm = nn.BatchNorm2D(hidden_features) self.norm1 = nn.BatchNorm2D(hidden_features) self.norm2 = nn.BatchNorm2D(out_features) def forward(self, x): x = self.fc1(x) x = self.norm1(x) x = self.act(x) if self.mid_conv: x_mid = self.mid(x) x_mid = self.mid_norm(x_mid) x = self.act(x_mid) x = self.drop(x) x = self.fc2(x) x = self.norm2(x) x = self.drop(x) return x登录后复制In [11]
class InvertedResidual(nn.Layer): def __init__(self, dim, mlp_ratio=4., drop=0., drop_path=0., use_layer_scale=True, layer_scale_init_value=1e-5): super().__init__() mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = MLP(in_features=dim, hidden_features=mlp_hidden_dim, drop=drop, mid_conv=True) self.drop_path = DropPath(drop_path) if drop_path > 0. \ else nn.Identity() self.use_layer_scale = use_layer_scale if use_layer_scale: self.layer_scale_2 = self.create_parameter(shape=(1, dim, 1, 1), default_initializer=nn.initializer.Constant(layer_scale_init_value)) def forward(self, x): if self.use_layer_scale: x = x + self.drop_path(self.layer_scale_2 * self.mlp(x)) else: x = x + self.drop_path(self.mlp(x)) return x登录后复制In [12]
class MRConv4D(nn.Layer): """ Max-Relative Graph Convolution (Paper: https://arxiv.org/abs/1904.03751) for dense data type K is the number of superpatches, therefore hops equals res // K. """ def __init__(self, in_channels, out_channels, K=2): super(MRConv4D, self).__init__() self.nn = nn.Sequential( nn.Conv2D(in_channels * 2, out_channels, 1, bias_attr=False), nn.BatchNorm2D(in_channels * 2), nn.GELU() ) self.K = K def forward(self, x): B, C, H, W = x.shape x_j = x - x for i in range(self.K, H, self.K): x_c = x - paddle.concat([x[:, :, -i:, :], x[:, :, :-i, :]], axis=2) x_j = paddle.maximum(x_j, x_c) for i in range(self.K, W, self.K): x_r = x - paddle.concat([x[:, :, :, -i:], x[:, :, :, :-i]], axis=3) x_j = paddle.maximum(x_j, x_r) x = paddle.concat([x, x_j], axis=1) return self.nn(x)登录后复制In [13]
class Grapher(nn.Layer): """ Grapher module with graph convolution and fc layers """ def __init__(self, in_channels, drop_path=0.0, K=2): super(Grapher, self).__init__() self.channels = in_channels self.K = K self.fc1 = nn.Sequential( nn.Conv2D(in_channels, in_channels, 1, stride=1, padding=0), nn.BatchNorm2D(in_channels), ) self.graph_conv = MRConv4D(in_channels, in_channels * 2, K=self.K) self.fc2 = nn.Sequential( nn.Conv2D(in_channels * 2, in_channels, 1, stride=1, padding=0), nn.BatchNorm2D(in_channels), ) self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity() def forward(self, x): _tmp = x x = self.fc1(x) x = self.graph_conv(x) x = self.fc2(x) x = self.drop_path(x) + _tmp return x登录后复制In [14]
class Downsample(nn.Layer): """ Convolution-based downsample """ def __init__(self, in_dim, out_dim): super().__init__() self.conv = nn.Sequential( nn.Conv2D(in_dim, out_dim, 3, stride=2, padding=1, bias_attr=False), nn.BatchNorm2D(out_dim), ) def forward(self, x): x = self.conv(x) return x登录后复制In [15]
class FFN(nn.Layer): def __init__(self, in_features, hidden_features=None, out_features=None, drop_path=0.0): super().__init__() out_features = out_features or in_features # same as input hidden_features = hidden_features or in_features # x4 self.fc1 = nn.Sequential( nn.Conv2D(in_features, hidden_features, 1, stride=1, padding=0, bias_attr=False), nn.BatchNorm2D(hidden_features), ) self.act = nn.GELU() self.fc2 = nn.Sequential( nn.Conv2D(hidden_features, out_features, 1, stride=1, padding=0, bias_attr=False), nn.BatchNorm2D(out_features), ) self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity() def forward(self, x): shortcut = x x = self.fc1(x) x = self.act(x) x = self.fc2(x) x = self.drop_path(x) + shortcut return x登录后复制In [16]
class MobileViG(nn.Layer): def __init__(self, local_blocks, local_channels, global_blocks, global_channels, dropout=0., drop_path=0., emb_dims=512, K=2, distillation=True, num_classes=1000): super(MobileViG, self).__init__() self.distillation = distillation n_blocks = sum(global_blocks) + sum(local_blocks) dpr = [x.item() for x in paddle.linspace(0, drop_path, n_blocks)] # stochastic depth decay rule dpr_idx = 0 self.stem = Stem(input_dim=3, output_dim=local_channels[0]) # local processing with inverted residuals self.local_backbone = nn.LayerList([]) for i in range(len(local_blocks)): if i > 0: self.local_backbone.append(Downsample(local_channels[i-1], local_channels[i])) for _ in range(local_blocks[i]): self.local_backbone.append(InvertedResidual(dim=local_channels[i], mlp_ratio=4, drop_path=dpr[dpr_idx])) dpr_idx += 1 self.local_backbone.append(Downsample(local_channels[-1], global_channels[0])) # transition from local to global # global processing with svga self.backbone = nn.LayerList([]) for i in range(len(global_blocks)): if i > 0: self.backbone.append(Downsample(global_channels[i-1], global_channels[i])) for j in range(global_blocks[i]): self.backbone.append(nn.Sequential( Grapher(global_channels[i], drop_path=dpr[dpr_idx], K=K), FFN(global_channels[i], global_channels[i] * 4, drop_path=dpr[dpr_idx]) ) ) dpr_idx += 1 self.prediction = nn.Sequential(nn.AdaptiveAvgPool2D(1), nn.Conv2D(global_channels[-1], emb_dims, 1, bias_attr=False), nn.BatchNorm2D(emb_dims), nn.GELU(), nn.Dropout(dropout)) self.head = nn.Conv2D(emb_dims, num_classes, 1, bias_attr=True) if self.distillation: self.dist_head = nn.Conv2D(emb_dims, num_classes, 1, bias_attr=True) self.apply(self._init_weights) def _init_weights(self, m): tn = nn.initializer.TruncatedNormal(std=.02) km = nn.initializer.KaimingNormal() one = nn.initializer.Constant(1.0) zero = nn.initializer.Constant(0.0) if isinstance(m, nn.Linear): tn(m.weight) if isinstance(m, nn.Linear) and m.bias is not None: zero(m.bias) elif isinstance(m, (nn.LayerNorm, nn.BatchNorm2D)): zero(m.bias) one(m.weight) elif isinstance(m, nn.Conv2D): km(m.weight) if m.bias is not None: zero(m.bias) def forward(self, inputs): x = self.stem(inputs) B, C, H, W = x.shape for i in range(len(self.local_backbone)): x = self.local_backbone[i](x) for i in range(len(self.backbone)): x = self.backbone[i](x) x = self.prediction(x) if self.distillation: x = self.head(x).squeeze(-1).squeeze(-1), self.dist_head(x).squeeze(-1).squeeze(-1) if not self.training: x = (x[0] + x[1]) / 2 else: x = self.head(x).squeeze(-1).squeeze(-1) return x登录后复制In [17]
num_classes = 10def mobilevig_ti(pretrained=False, **kwargs): model = MobileViG(local_blocks=[2, 2, 6], local_channels=[42, 84, 168], global_blocks=[2], global_channels=[256], dropout=0., drop_path=0.1, emb_dims=512, K=2, distillation=False, num_classes=num_classes) return modeldef mobilevig_s(pretrained=False, **kwargs): model = MobileViG(local_blocks=[3, 3, 9], local_channels=[42, 84, 176], global_blocks=[3], global_channels=[256], dropout=0., drop_path=0.1, emb_dims=512, K=2, distillation=False, num_classes=num_classes) return modeldef mobilevig_m(pretrained=False, **kwargs): model = MobileViG(local_blocks=[3, 3, 9], local_channels=[42, 84, 224], global_blocks=[3], global_channels=[400], dropout=0., drop_path=0.1, emb_dims=768, K=2, distillation=False, num_classes=num_classes) return modeldef mobilevig_b(pretrained=False, **kwargs): model = MobileViG(local_blocks=[5, 5, 15], local_channels=[42, 84, 240], global_blocks=[5], global_channels=[464], dropout=0., drop_path=0.1, emb_dims=768, K=2, distillation=False, num_classes=num_classes) return model登录后复制
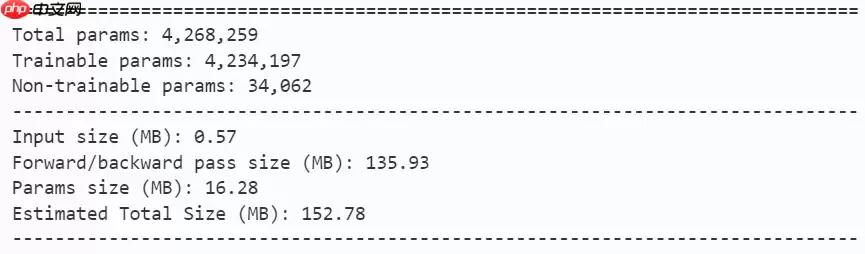
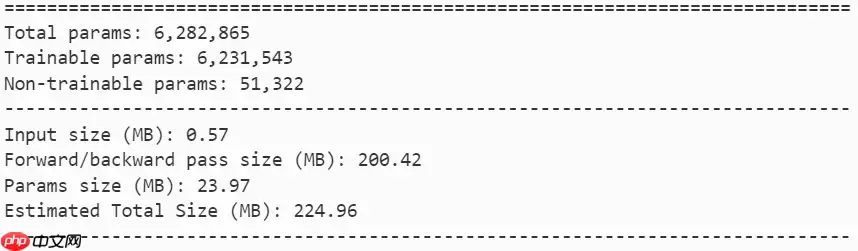
2.3.4 MobileViG模型参数配置
In [ ]model = mobilevig_ti()paddle.summary(model, (1, 3, 224, 224))登录后复制
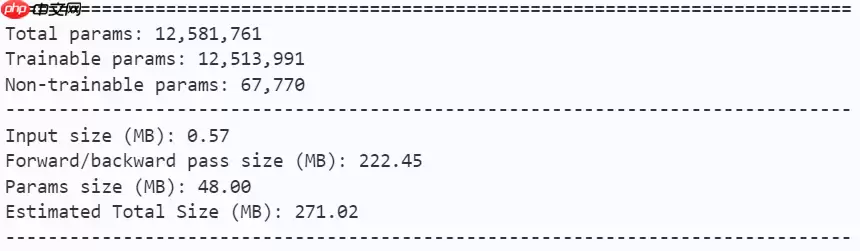
model = mobilevig_s()paddle.summary(model, (1, 3, 224, 224))登录后复制
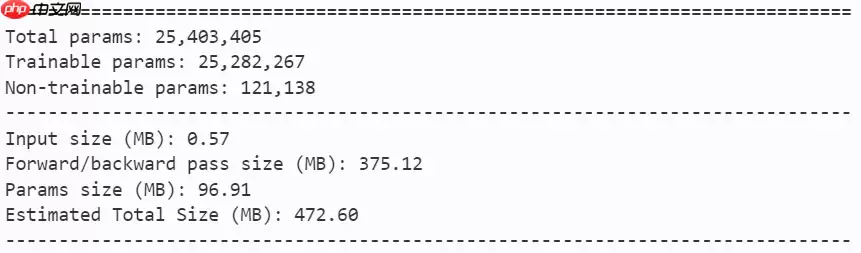
model = mobilevig_m()paddle.summary(model, (1, 3, 224, 224))登录后复制
model = mobilevig_b()paddle.summary(model, (1, 3, 224, 224))登录后复制
2.4 训练
In [22]learning_rate = 0.001n_epochs = 100paddle.seed(42)np.random.seed(42)登录后复制In [ ]
work_path = 'work/model'# MobileViG-Tinymodel = mobilevig_ti()criterion = LabelSmoothingCrossEntropy()scheduler = paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=learning_rate, T_max=50000 // batch_size * n_epochs, verbose=False)optimizer = paddle.optimizer.Adam(parameters=model.parameters(), learning_rate=scheduler, weight_decay=1e-5)gate = 0.0threshold = 0.0best_acc = 0.0val_acc = 0.0loss_record = {'train': {'loss': [], 'iter': []}, 'val': {'loss': [], 'iter': []}} # for recording lossacc_record = {'train': {'acc': [], 'iter': []}, 'val': {'acc': [], 'iter': []}} # for recording accuracyloss_iter = 0acc_iter = 0for epoch in range(n_epochs): # ---------- Training ---------- model.train() train_num = 0.0 train_loss = 0.0 val_num = 0.0 val_loss = 0.0 accuracy_manager = paddle.metric.Accuracy() val_accuracy_manager = paddle.metric.Accuracy() print("#===epoch: {}, lr={:.10f}===#".format(epoch, optimizer.get_lr())) for batch_id, data in enumerate(train_loader): x_data, y_data = data labels = paddle.unsqueeze(y_data, axis=1) logits = model(x_data) loss = criterion(logits, y_data) acc = accuracy_manager.compute(logits, labels) accuracy_manager.update(acc) if batch_id % 10 == 0: loss_record['train']['loss'].append(loss.numpy()) loss_record['train']['iter'].append(loss_iter) loss_iter += 1 loss.backward() optimizer.step() scheduler.step() optimizer.clear_grad() train_loss += loss train_num += len(y_data) total_train_loss = (train_loss / train_num) * batch_size train_acc = accuracy_manager.accumulate() acc_record['train']['acc'].append(train_acc) acc_record['train']['iter'].append(acc_iter) acc_iter += 1 # Print the information. print("#===epoch: {}, train loss is: {}, train acc is: {:2.2f}%===#".format(epoch, total_train_loss.numpy(), train_acc*100)) # ---------- Validation ---------- model.eval() for batch_id, data in enumerate(val_loader): x_data, y_data = data labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad(): logits = model(x_data) loss = criterion(logits, y_data) acc = val_accuracy_manager.compute(logits, labels) val_accuracy_manager.update(acc) val_loss += loss val_num += len(y_data) total_val_loss = (val_loss / val_num) * batch_size loss_record['val']['loss'].append(total_val_loss.numpy()) loss_record['val']['iter'].append(loss_iter) val_acc = val_accuracy_manager.accumulate() acc_record['val']['acc'].append(val_acc) acc_record['val']['iter'].append(acc_iter) print("#===epoch: {}, val loss is: {}, val acc is: {:2.2f}%===#".format(epoch, total_val_loss.numpy(), val_acc*100)) # ===================save==================== if val_acc > best_acc: best_acc = val_acc paddle.save(model.state_dict(), os.path.join(work_path, 'best_model.pdparams')) paddle.save(optimizer.state_dict(), os.path.join(work_path, 'best_optimizer.pdopt'))print(best_acc)paddle.save(model.state_dict(), os.path.join(work_path, 'final_model.pdparams'))paddle.save(optimizer.state_dict(), os.path.join(work_path, 'final_optimizer.pdopt'))登录后复制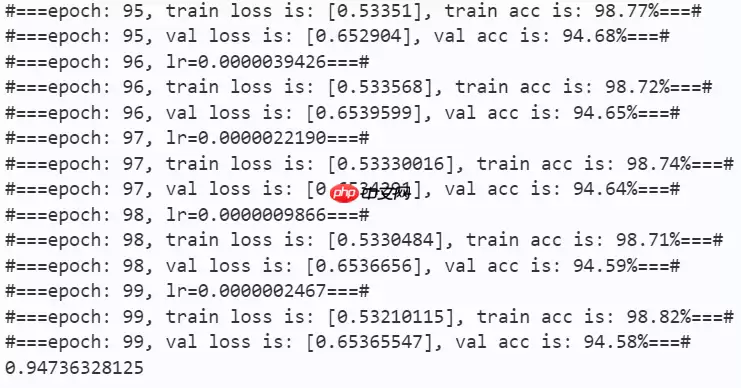
2.5 结果分析
In [24]def plot_learning_curve(record, title="loss", ylabel='CE Loss'): ''' Plot learning curve of your CNN ''' maxtrain = max(map(float, record['train'][title])) maxval = max(map(float, record['val'][title])) ymax = max(maxtrain, maxval) * 1.1 mintrain = min(map(float, record['train'][title])) minval = min(map(float, record['val'][title])) ymin = min(mintrain, minval) * 0.9 total_steps = len(record['train'][title]) x_1 = list(map(int, record['train']['iter'])) x_2 = list(map(int, record['val']['iter'])) figure(figsize=(10, 6)) plt.plot(x_1, record['train'][title], c='tab:red', label='train') plt.plot(x_2, record['val'][title], c='tab:cyan', label='val') plt.ylim(ymin, ymax) plt.xlabel('Training steps') plt.ylabel(ylabel) plt.title('Learning curve of {}'.format(title)) plt.legend() plt.show()登录后复制In [25]plot_learning_curve(loss_record, title="loss", ylabel='CE Loss')登录后复制
登录后复制登录后复制In [26]
plot_learning_curve(acc_record, title="acc", ylabel='Accuracy')登录后复制
登录后复制登录后复制In [27]
import timework_path = 'work/model'model = mobilevig_ti()model_state_dict = paddle.load(os.path.join(work_path, 'best_model.pdparams'))model.set_state_dict(model_state_dict)model.eval()aa = time.time()for batch_id, data in enumerate(val_loader): x_data, y_data = data labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad(): logits = model(x_data)bb = time.time()print("Throughout:{}".format(int(len(val_dataset)//(bb - aa))))登录后复制Throughout:932登录后复制In [28]
def get_cifar10_labels(labels): """返回CIFAR10数据集的文本标签。""" text_labels = [ 'airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck'] return [text_labels[int(i)] for i in labels]登录后复制In [29]
def show_images(imgs, num_rows, num_cols, pred=None, gt=None, scale=1.5): """Plot a list of images.""" figsize = (num_cols * scale, num_rows * scale) _, axes = plt.subplots(num_rows, num_cols, figsize=figsize) axes = axes.flatten() for i, (ax, img) in enumerate(zip(axes, imgs)): if paddle.is_tensor(img): ax.imshow(img.numpy()) else: ax.imshow(img) ax.axes.get_xaxis().set_visible(False) ax.axes.get_yaxis().set_visible(False) if pred or gt: ax.set_title("pt: " + pred[i] + "\ngt: " + gt[i]) return axes登录后复制In [30]work_path = 'work/model'X, y = next(iter(DataLoader(val_dataset, batch_size=18)))model = mobilevig_ti()model_state_dict = paddle.load(os.path.join(work_path, 'best_model.pdparams'))model.set_state_dict(model_state_dict)model.eval()logits = model(X)y_pred = paddle.argmax(logits, -1)X = paddle.transpose(X, [0, 2, 3, 1])axes = show_images(X.reshape((18, 224, 224, 3)), 1, 18, pred=get_cifar10_labels(y_pred), gt=get_cifar10_labels(y))plt.show()登录后复制
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).登录后复制
登录后复制代码解释
相关攻略

Trae在Python数据分析与机器学习项目中主要通过四种方式提供支持:利用Auto模式自动生成并执行端到端分析脚本;通过AgentCLI命令行自动化机器学习建模流程;对现有代码进行智能调试与优化;借助语音交互快速构建数据处理函数。这些功能覆盖了从需求描述到代码生成、模型构建及代码优化的全流程。

在Python编程中,你是否也曾编写过类似的统计代码? 统计词频 count = {} for word in words: if word in count: count[word] += 1 else: count[word] = 1 实际上,这种高频的计数需求,完全可以通过Python内置

Trae稳定支持Python3 10至3 13版本,3 9及以下版本无法运行。Python3 14处于实验性支持阶段,核心功能可能受限。当存在多个3 10以上版本时,Trae优先选择虚拟环境中的解释器,其次为最高系统版本。此外,Trae仅兼容64位Python解释器,不支持32位架构。

在企业级数据采集与自动化运维实践中,IT团队普遍面临一个核心挑战:Python爬虫为何频繁报错,修补维护何时才能终结?随着前端技术演进与动态反爬机制的日益复杂,依赖DOM解析的传统爬虫脚本往往陷入“部署即过时,运行即异常”的困境。本文将深入解析传统爬虫代码脆弱性的根本原因,并系统介绍一种能够重塑数据

很多刚接触Docker的开发者常有一个误解:制作镜像不就是把源代码打包进去就行了吗?实际上,在企业级的标准化开发流程中,直接将源码打包进Docker镜像是非常不专业的做法。这会导致镜像体积臃肿、引入潜在安全风险,并且模糊了“构建环境”与“运行环境”的边界。本文将深入解析Java、Vue、Go、Pyt
热门专题







热门推荐

洞察市场先机:SOL合约持仓量深度解析与实战应用 在瞬息万变的加密货币衍生品市场,SOL合约持仓量如同一张实时绘制的“资金热力图”。它不仅揭示了多空双方投入的真实资本规模,更映射出市场情绪的微妙变化与潜在的趋势转折点。对于精明的交易者而言,掌握解读这张“地图”的能力,意味着能在市场博弈中抢占信息高地

《像素秘境·唤灵师》可通过九游APP或官网下载。在九游APP搜索游戏名即可预约并获取最新版,官网专区也提供高速与普通下载选项。两种方式均能便捷安装,专区还附有游戏攻略供参考。

车市价格战正处微妙临界点。二季度起,一股与以往降价潮不同的涨价暗流开始酝酿。截至五月中旬,至少15家主流新能源品牌已释放调价信号,或直接涨价,或收紧优惠,涉及比亚迪、特斯拉、蔚来等传统及新势力车企。

说起《上古卷轴5:重制版》的主线旅程,奥杜因克星任务绝对是一座绕不开的高峰。它不仅是叙事的关键转折点,更是一场对玩家策略、操作与耐心的综合试炼。想要征服这条恶龙,光有勇气可不够,一份清晰的行动路线图至关重要。接下来,我们就一起梳理一下这场终极对决的核心脉络与实用技巧。 一、剑指目标:前往奥杜因克星的

SOL合约限价单的最小价格单位是0 001美元。该单位是交易时报价的最小变动值,直接影响订单的精确性与灵活性。了解此规则对合约交易者有效设置订单和管理策略至关重要。