【NIPS 2022】DHVT:弥补ViT与CNN在小数据集上的性能差距
本文提出动态混合视觉变压器(DHVT),以解决小数据集上视觉Transformer因缺乏归纳偏置导致的性能差距。DHVT通过串联重叠Patch嵌入增强空间相关性,动态聚合前馈网络和相互作用多头自注意优化通道表示。在CIFAR-100和ImageNet-1K上,以轻量参数实现先进性能,且代码复现验证了其有效性。

摘要
在小数据集上从头开始训练时,视觉Transformer和卷积神经网络之间仍然存在着巨大的性能差距,这是由于缺乏归纳偏置造成的。 在本文中,我们进一步考虑了这一问题,并指出了ViTs在归纳偏置下的两个弱点,即空间相关性和不同的通道表示。 首先,在空间方面,对象具有局部紧凑性和相关性,因此需要从令牌及其邻域中提取细粒度特征。 而数据的缺乏则阻碍了VITS参与空间相关性的研究。 第二,在通道方面,不同通道的表征呈现出多样性。 但是由于数据的稀少,使得VITS无法学习到足够强的表示来进行准确的识别。 为此,我们提出了动态混合视觉变压器(DHVT)作为增强两种归纳偏置的解决方案。 在空间方面,我们采用了一种混合结构,将卷积融合到Patch嵌入和多层感知器模块中,强制模型捕获令牌及其邻近特征。 在通道方面,我们在MLP中引入了动态特征聚合模块,在多头自关注模块中引入了全新的“头令牌”设计,以帮助重新校准通道表示,并使不同的通道组表示相互影响。 弱通道表示的融合形成了足够强的分类表示。 通过这种设计,我们成功地消除了CNNS和VITS之间的性能差距,我们的DHVT在轻量级模型上实现了一系列最先进的性能,CIFAR-100在22.8M参数上实现了85.68%的性能,ImageNet-1K在24.0M参数上实现了82.3%的性能。
1. DHVT
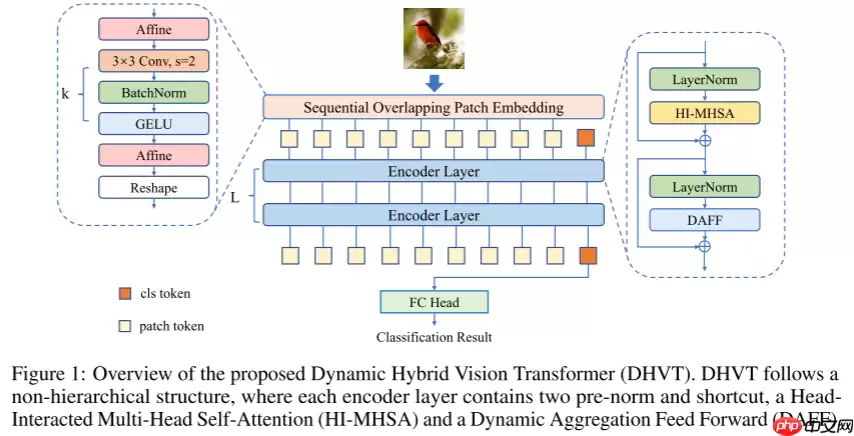
本文针对ViT缺乏空间相关性和多样的通道表示这两个弱点,提出了一种新的Transformer架构——DHVT,DHVT的总体框架如图1所示,采用的与ViT架构相同,没有使用分层架构。
1.1 串联重叠的Patch嵌入(Sequential Overlapping Patch Embedding,SOPE)
改进后的补丁嵌入称为Sequential overlap patch embedding(SOPE),它包含了3×3步长s=2的卷积、BN和GELU激活的几个连续卷积层。卷积层数与patch大小的关系为P=2^k。SOPE能够消除以前嵌入模块带来的不连续性,保留重要的底层特征。它能在一定程度上提供位置信息。在一系列卷积层前后分别采用两次仿射变换。该操作对输入特征进行了缩放和移位,其作用类似于归一化,使训练性能在小数据集上更加稳定。SOPE的整个流程可以表述如下:
Aff(x)=Diag(α)x+βGi(x)=GELU(BN(Conv(x))),i=1,…,kSOPE(x)=Reshape(Aff(Gk(…(G2(G1(Aff(x)))))))
这里的α和β为可学习参数,分别初始化为1和0。
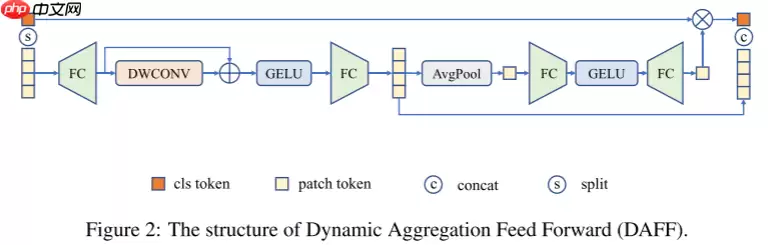
1.2 动态聚合前馈 (Dynamic Aggregation Feed Forward,DAFF)
ViT 中的普通前馈网络 (FFN) 由两个全连接层和 GELU 组成。DAFF 在 FFN 中集成了来自 MobileNetV1 的深度卷积 (DWConv)。由于深度卷积带来的归纳偏置,模型被迫捕获相邻特征,解决了空间视图上的问题。它极大地减少了在小型数据集上从头开始训练时的性能差距,并且比标准 CNN 收敛得更快。还使用了与来自 SENet 的 SE 模块类似的机制。Xc、Xp 分别表示类标记和补丁标记。类标记在投影层之前从序列中分离为 Xc。剩余的令牌 Xp 则通过一个内部有残差连接的深度集成多层感知器。然后将输出的补丁标记平均为权重向量 W。在squeeze-excitation操作之后,输出权重向量将与类标记通道相乘。然后重新校准的类令牌将与输出补丁令牌以恢复令牌序列,DAFF的SE操作可以表述如下:
W=Linear(GELU( Linear (( Average (Xp))))Xc=Xc⊙W
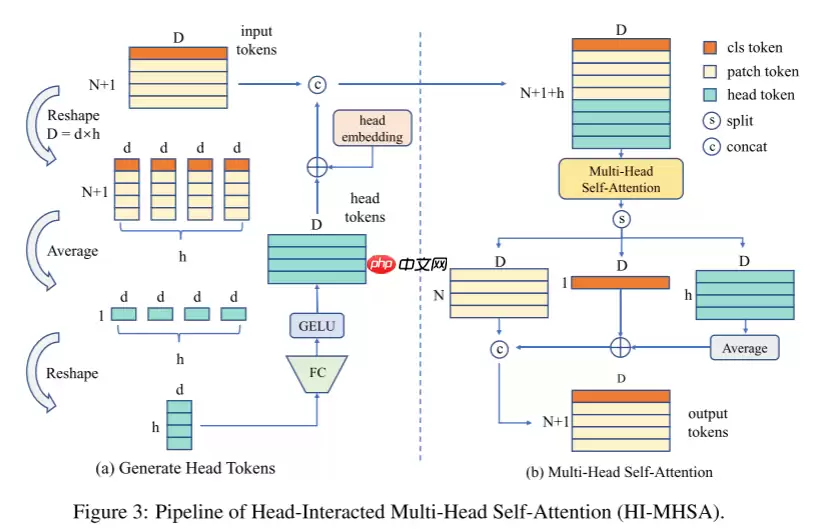
1.3 相互作用多头自注意(HI-MHSA)
在最初的MHSA模块中,每个注意头都没有与其他头交互。在缺乏训练数据的情况下,每个通道组的表征都太弱而无法识别。在HI-MHSA中,每个d维令牌,包括类令牌,将被重塑为h部分。每个部分包含d个通道,其中d =d×h。所有分离的标记在它们各自的部分中取平均值。因此总共得到h个令牌,每个令牌都是d维的。所有这样的中间令牌将再次投影到d维,总共产生h个头部令牌,头令牌的生成过程如下所示:
然后将头令牌与类令牌和Patch令牌合并,并使用原始的多头注意力进行交互,最后对头令牌进行平均池化操作,并将其与类令牌相加,以增强类令牌的判别能力,整体架构如图3所示。
2. 代码复现
2.1 下载并导入所需的库
In [ ]!pip install einops-0.3.0-py3-none-any.whl登录后复制In [22]
%matplotlib inlineimport paddleimport numpy as npimport matplotlib.pyplot as pltfrom paddle.vision.datasets import Cifar10from paddle.vision.transforms import Transposefrom paddle.io import Dataset, DataLoaderfrom paddle import nnimport paddle.nn.functional as Fimport paddle.vision.transforms as transformsimport osimport matplotlib.pyplot as pltfrom matplotlib.pyplot import figureimport itertoolsfrom einops.layers.paddle import Rearrangeimport mathfrom functools import partial登录后复制
2.2 创建数据集
In [23]train_tfm = transforms.Compose([ transforms.RandomResizedCrop(32), transforms.ColorJitter(brightness=0.2,contrast=0.2, saturation=0.2), transforms.RandomHorizontalFlip(0.5), transforms.RandomRotation(20), transforms.ToTensor(), transforms.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),])test_tfm = transforms.Compose([ transforms.Resize((32, 32)), transforms.ToTensor(), transforms.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),])登录后复制In [24]
paddle.vision.set_image_backend('cv2')# 使用Cifar10数据集train_dataset = Cifar10(data_file='data/data152754/cifar-10-python.tar.gz', mode='train', transform = train_tfm, )val_dataset = Cifar10(data_file='data/data152754/cifar-10-python.tar.gz', mode='test',transform = test_tfm)print("train_dataset: %d" % len(train_dataset))print("val_dataset: %d" % len(val_dataset))登录后复制train_dataset: 50000val_dataset: 10000登录后复制In [25]
batch_size=256登录后复制In [26]
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, drop_last=True, num_workers=4)val_loader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False, drop_last=False, num_workers=4)登录后复制
2.3 模型的创建
2.3.1 标签平滑
In [27]class LabelSmoothingCrossEntropy(nn.Layer): def __init__(self, smoothing=0.1): super().__init__() self.smoothing = smoothing def forward(self, pred, target): confidence = 1. - self.smoothing log_probs = F.log_softmax(pred, axis=-1) idx = paddle.stack([paddle.arange(log_probs.shape[0]), target], axis=1) nll_loss = paddle.gather_nd(-log_probs, index=idx) smooth_loss = paddle.mean(-log_probs, axis=-1) loss = confidence * nll_loss + self.smoothing * smooth_loss return loss.mean()登录后复制
2.3.2 DropPath
In [28]def drop_path(x, drop_prob=0.0, training=False): """ Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks). the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper... See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... """ if drop_prob == 0.0 or not training: return x keep_prob = paddle.to_tensor(1 - drop_prob) shape = (paddle.shape(x)[0],) + (1,) * (x.ndim - 1) random_tensor = keep_prob + paddle.rand(shape, dtype=x.dtype) random_tensor = paddle.floor(random_tensor) # binarize output = x.divide(keep_prob) * random_tensor return outputclass DropPath(nn.Layer): def __init__(self, drop_prob=None): super(DropPath, self).__init__() self.drop_prob = drop_prob def forward(self, x): return drop_path(x, self.drop_prob, self.training)登录后复制
2.4.3 DAFF
In [29]class DAFF(nn.Layer): def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0., kernel_size=3, with_bn=True): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features # pointwise self.conv1 = nn.Conv2D(in_features, hidden_features, kernel_size=1, stride=1, padding=0) # depthwise self.conv2 = nn.Conv2D( hidden_features, hidden_features, kernel_size=kernel_size, stride=1, padding=(kernel_size - 1) // 2, groups=hidden_features) # pointwise self.conv3 = nn.Conv2D(hidden_features, out_features, kernel_size=1, stride=1, padding=0) self.act = act_layer() self.bn1 = nn.BatchNorm2D(hidden_features) self.bn2 = nn.BatchNorm2D(hidden_features) self.bn3 = nn.BatchNorm2D(out_features) # The reduction ratio is always set to 4 self.squeeze = nn.AdaptiveAvgPool2D((1, 1)) self.compress = nn.Linear(in_features, in_features//4) self.excitation = nn.Linear(in_features//4, in_features) def forward(self, x): B, N, C = x.shape cls_token, tokens = paddle.split(x, [1, N - 1], axis=1) x = tokens.reshape((B, int(math.sqrt(N - 1)), int(math.sqrt(N - 1)), C)).transpose([0, 3, 1, 2]) x = self.conv1(x) x = self.bn1(x) x = self.act(x) shortcut = x x = self.conv2(x) x = self.bn2(x) x = self.act(x) x = shortcut + x x = self.conv3(x) x = self.bn3(x) weight = self.squeeze(x).flatten(1).reshape((B, 1, C)) weight = self.excitation(self.act(self.compress(weight))) cls_token = cls_token * weight tokens = x.flatten(2).transpose([0, 2, 1]) out = paddle.concat((cls_token, tokens), axis=1) return out登录后复制
2.4.4 HI-MHSA
In [30]class HI_Attention(nn.Layer): def __init__(self, dim, num_heads=8, qkv_bias=False, attn_drop=0., proj_drop=0.): super().__init__() self.num_heads = num_heads head_dim = dim // num_heads self.scale = head_dim ** -0.5 self.qkv = nn.Linear(dim, dim * 3, bias_attr=qkv_bias) self.attn_drop = nn.Dropout(attn_drop) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) self.act = nn.GELU() self.ht_proj = nn.Linear(dim//self.num_heads, dim, bias_attr=True) self.ht_norm = nn.LayerNorm(dim//self.num_heads) self.pos_embed = self.create_parameter(shape=(1, self.num_heads, dim), default_initializer=nn.initializer.TruncatedNormal(std=.02)) def forward(self, x): B, N, C = x.shape H = W =int(math.sqrt(N-1)) # head token head_pos = paddle.expand(self.pos_embed, shape=(x.shape[0], -1, -1)) x_ = x.reshape((B, -1, self.num_heads, C // self.num_heads)).transpose([0, 2, 1, 3]) x_ = paddle.mean(x_, axis=2, keepdim=True) # now the shape is [B, h, 1, d//h] x_ = self.ht_proj(x_).reshape((B, -1, self.num_heads, C // self.num_heads)) x_ = self.act(self.ht_norm(x_)).flatten(2) x_ = x_ + head_pos x = paddle.concat([x, x_], axis=1) # normal mhsa qkv = self.qkv(x).reshape((B, N+self.num_heads, 3, self.num_heads, C // self.num_heads)).transpose([2, 0, 3, 1, 4]) q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple) attn = (q @ k.transpose([0, 1, 3, 2])) * self.scale attn = F.softmax(attn, axis=-1) attn = self.attn_drop(attn) x = (attn @ v).transpose([0, 2, 1, 3]).reshape((B, N+self.num_heads, C)) x = self.proj(x) # merge head tokens into cls token cls, patch, ht = paddle.split(x, [1, N-1, self.num_heads], axis=1) cls = cls + paddle.mean(ht, axis=1, keepdim=True) x = paddle.concat([cls, patch], axis=1) x = self.proj_drop(x) return x登录后复制In [31]
class DHVT_Block(nn.Layer): def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, drop=0., attn_drop=0., qk_scale=None, drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm): super().__init__() self.norm1 = norm_layer(dim) self.attn = HI_Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias,attn_drop=attn_drop, proj_drop=drop) self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity() self.norm2 = norm_layer(dim) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = DAFF(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop, kernel_size=3) self.mlp_hidden_dim = mlp_hidden_dim def forward(self, x): B, N, C = x.shape x = x + self.drop_path(self.attn(self.norm1(x))) x = x + self.drop_path(self.mlp(self.norm2(x))) return x登录后复制In [32]
class Affine(nn.Layer): def __init__(self, dim): super().__init__() self.alpha = self.create_parameter(shape=[1, dim, 1, 1], default_initializer=nn.initializer.Constant(1.0)) self.beta = self.create_parameter(shape=[1, dim, 1, 1], default_initializer=nn.initializer.Constant(0.0)) def forward(self, x): x = x * self.alpha + self.beta return x登录后复制In [33]
def to_2tuple(x): return (x, x)def conv3x3(in_planes, out_planes, stride=1): """3x3 convolution with padding""" return nn.Sequential( nn.Conv2D( in_planes, out_planes, kernel_size=3, stride=stride, padding=1, bias_attr=False ), nn.BatchNorm2D(out_planes) )class ConvPatchEmbed(nn.Layer): def __init__(self, img_size=224, patch_size=16, in_chans=3, embed_dim=768, init_values=1e-2): super().__init__() ori_img_size = img_size img_size = to_2tuple(img_size) patch_size = to_2tuple(patch_size) num_patches = (img_size[1] // patch_size[1]) * (img_size[0] // patch_size[0]) self.img_size = img_size self.patch_size = patch_size self.num_patches = num_patches if patch_size[0] == 16: self.proj = nn.Sequential( conv3x3(3, embed_dim // 8, 2), nn.GELU(), conv3x3(embed_dim // 8, embed_dim // 4, 2), nn.GELU(), conv3x3(embed_dim // 4, embed_dim // 2, 2), nn.GELU(), conv3x3(embed_dim // 2, embed_dim, 2), ) elif patch_size[0] == 4: self.proj = nn.Sequential( conv3x3(3, embed_dim // 2, 2), nn.GELU(), conv3x3(embed_dim // 2, embed_dim, 2), ) elif patch_size[0] == 2: self.proj = nn.Sequential( conv3x3(3, embed_dim, 2), nn.GELU(), ) else: raise("For convolutional projection, patch size has to be in [2, 4, 16]") self.pre_affine = Affine(3) self.post_affine = Affine(embed_dim) def forward(self, x): B, C, H, W = x.shape x = self.pre_affine(x) x = self.proj(x) x = self.post_affine(x) Hp, Wp = x.shape[2], x.shape[3] x = x.flatten(2).transpose([0, 2, 1]) return x登录后复制In [34]class DHVT(nn.Layer): def __init__(self, img_size=32, patch_size=16, in_chans=3, num_classes=100, embed_dim=768, depth=12, num_heads=12, mlp_ratio=4., qkv_bias=True, drop_rate=0., attn_drop_rate=0., drop_path_rate=0., norm_layer=None, act_layer=None): super().__init__() self.img_size = img_size self.depth = depth self.num_classes = num_classes self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models self.num_tokens = 1 norm_layer = norm_layer or partial(nn.LayerNorm, epsilon=1e-6) act_layer = act_layer or nn.GELU # Patch Embedding self.patch_embed = ConvPatchEmbed(img_size=img_size, embed_dim=embed_dim, patch_size=patch_size) self.cls_token = self.create_parameter(shape=(1, 1, embed_dim), default_initializer=nn.initializer.TruncatedNormal(std=.02)) self.pos_drop = nn.Dropout(drop_rate) dpr = [x.item() for x in paddle.linspace(0, drop_path_rate, depth)] # stochastic depth decay rule self.blocks = nn.LayerList([ DHVT_Block( dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[i], norm_layer=norm_layer, act_layer=act_layer) for i in range(depth)]) self.norm = norm_layer(embed_dim) # Classifier head(s) self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity() self.apply(self.init_weights) def init_weights(self, m): tn = nn.initializer.TruncatedNormal(std=0.02) zero = nn.initializer.Constant(0.0) one = nn.initializer.Constant(1.0) km = nn.initializer.KaimingNormal() if isinstance(m, nn.Linear): tn(m.weight) if isinstance(m, nn.Linear) and m.bias is not None: zero(m.bias) elif isinstance(m, nn.LayerNorm): zero(m.bias) one(m.weight) elif isinstance(m, nn.Conv2D): km(m.weight) if m.bias is not None: zero(m.bias) def forward_features(self, x): B, _, h, w = x.shape x = self.patch_embed(x) cls_token = self.cls_token.expand([x.shape[0], -1, -1]) # stole cls_tokens impl from Phil Wang, thanks x = paddle.concat((cls_token, x), axis=1) for i, blk in enumerate(self.blocks): x = blk(x) x = self.norm(x) return x[:, 0] def forward(self, x): x = self.forward_features(x) x = self.head(x) return x登录后复制In [35]
num_classes = 10def dhvt_tiny_cifar_patch2(): model = DHVT(img_size=32, patch_size=4, embed_dim=192, depth=12, num_heads=4, mlp_ratio=4, num_classes=num_classes) return modeldef dhvt_small_cifar_patch2(): model = DHVT(img_size=32, patch_size=4, embed_dim=384, depth=12, num_heads=8, mlp_ratio=4, num_classes=num_classes) return modeldef dhvt_tiny_cifar_patch2(): model = DHVT(img_size=32, patch_size=2, embed_dim=192, depth=12, num_heads=4, mlp_ratio=4, num_classes=num_classes) return modeldef dhvt_small_cifar_patch2(): model = DHVT(img_size=32, patch_size=2, embed_dim=384, depth=12, num_heads=8, mlp_ratio=4, num_classes=num_classes) return model登录后复制
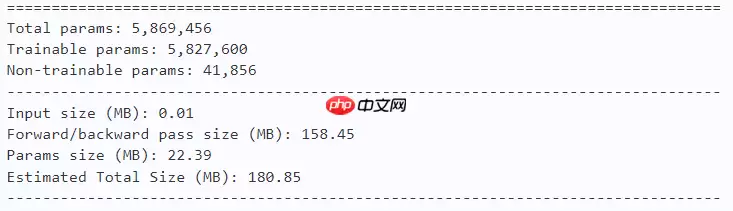
2.3.5 模型的参数
In [ ]model = dhvt_tiny_cifar_patch2()paddle.summary(model, (1, 3, 32, 32))登录后复制
2.4 训练
In [37]learning_rate = 0.001n_epochs = 50paddle.seed(42)np.random.seed(42)登录后复制In [ ]
work_path = 'work/model'# DHVT-T-2model = dhvt_tiny_cifar_patch2()criterion = LabelSmoothingCrossEntropy()scheduler = paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=learning_rate, T_max=50000 // batch_size * n_epochs, verbose=False)optimizer = paddle.optimizer.Adam(parameters=model.parameters(), learning_rate=scheduler, weight_decay=1e-5)gate = 0.0threshold = 0.0best_acc = 0.0val_acc = 0.0loss_record = {'train': {'loss': [], 'iter': []}, 'val': {'loss': [], 'iter': []}} # for recording lossacc_record = {'train': {'acc': [], 'iter': []}, 'val': {'acc': [], 'iter': []}} # for recording accuracyloss_iter = 0acc_iter = 0for epoch in range(n_epochs): # ---------- Training ---------- model.train() train_num = 0.0 train_loss = 0.0 val_num = 0.0 val_loss = 0.0 accuracy_manager = paddle.metric.Accuracy() val_accuracy_manager = paddle.metric.Accuracy() print("#===epoch: {}, lr={:.10f}===#".format(epoch, optimizer.get_lr())) for batch_id, data in enumerate(train_loader): x_data, y_data = data labels = paddle.unsqueeze(y_data, axis=1) logits = model(x_data) loss = criterion(logits, y_data) acc = accuracy_manager.compute(logits, labels) accuracy_manager.update(acc) if batch_id % 10 == 0: loss_record['train']['loss'].append(loss.numpy()) loss_record['train']['iter'].append(loss_iter) loss_iter += 1 loss.backward() optimizer.step() scheduler.step() optimizer.clear_grad() train_loss += loss train_num += len(y_data) total_train_loss = (train_loss / train_num) * batch_size train_acc = accuracy_manager.accumulate() acc_record['train']['acc'].append(train_acc) acc_record['train']['iter'].append(acc_iter) acc_iter += 1 # Print the information. print("#===epoch: {}, train loss is: {}, train acc is: {:2.2f}%===#".format(epoch, total_train_loss.numpy(), train_acc*100)) # ---------- Validation ---------- model.eval() for batch_id, data in enumerate(val_loader): x_data, y_data = data labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad(): logits = model(x_data) loss = criterion(logits, y_data) acc = val_accuracy_manager.compute(logits, labels) val_accuracy_manager.update(acc) val_loss += loss val_num += len(y_data) total_val_loss = (val_loss / val_num) * batch_size loss_record['val']['loss'].append(total_val_loss.numpy()) loss_record['val']['iter'].append(loss_iter) val_acc = val_accuracy_manager.accumulate() acc_record['val']['acc'].append(val_acc) acc_record['val']['iter'].append(acc_iter) print("#===epoch: {}, val loss is: {}, val acc is: {:2.2f}%===#".format(epoch, total_val_loss.numpy(), val_acc*100)) # ===================save==================== if val_acc > best_acc: best_acc = val_acc paddle.save(model.state_dict(), os.path.join(work_path, 'best_model.pdparams')) paddle.save(optimizer.state_dict(), os.path.join(work_path, 'best_optimizer.pdopt'))print(best_acc)paddle.save(model.state_dict(), os.path.join(work_path, 'final_model.pdparams'))paddle.save(optimizer.state_dict(), os.path.join(work_path, 'final_optimizer.pdopt'))登录后复制
2.5 结果分析
In [39]def plot_learning_curve(record, title="loss", ylabel='CE Loss'): ''' Plot learning curve of your CNN ''' maxtrain = max(map(float, record['train'][title])) maxval = max(map(float, record['val'][title])) ymax = max(maxtrain, maxval) * 1.1 mintrain = min(map(float, record['train'][title])) minval = min(map(float, record['val'][title])) ymin = min(mintrain, minval) * 0.9 total_steps = len(record['train'][title]) x_1 = list(map(int, record['train']['iter'])) x_2 = list(map(int, record['val']['iter'])) figure(figsize=(10, 6)) plt.plot(x_1, record['train'][title], c='tab:red', label='train') plt.plot(x_2, record['val'][title], c='tab:cyan', label='val') plt.ylim(ymin, ymax) plt.xlabel('Training steps') plt.ylabel(ylabel) plt.title('Learning curve of {}'.format(title)) plt.legend() plt.show()登录后复制In [40]plot_learning_curve(loss_record, title="loss", ylabel='CE Loss')登录后复制
登录后复制登录后复制In [41]
plot_learning_curve(acc_record, title="acc", ylabel='Accuracy')登录后复制
登录后复制登录后复制In [42]
import timework_path = 'work/model'model = dhvt_tiny_cifar_patch2()model_state_dict = paddle.load(os.path.join(work_path, 'best_model.pdparams'))model.set_state_dict(model_state_dict)model.eval()aa = time.time()for batch_id, data in enumerate(val_loader): x_data, y_data = data labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad(): logits = model(x_data)bb = time.time()print("Throughout:{}".format(int(len(val_dataset)//(bb - aa))))登录后复制Throughout:976登录后复制In [43]
def get_cifar10_labels(labels): """返回CIFAR10数据集的文本标签。""" text_labels = [ 'airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck'] return [text_labels[int(i)] for i in labels]登录后复制In [44]
def show_images(imgs, num_rows, num_cols, pred=None, gt=None, scale=1.5): """Plot a list of images.""" figsize = (num_cols * scale, num_rows * scale) _, axes = plt.subplots(num_rows, num_cols, figsize=figsize) axes = axes.flatten() for i, (ax, img) in enumerate(zip(axes, imgs)): if paddle.is_tensor(img): ax.imshow(img.numpy()) else: ax.imshow(img) ax.axes.get_xaxis().set_visible(False) ax.axes.get_yaxis().set_visible(False) if pred or gt: ax.set_title("pt: " + pred[i] + "\ngt: " + gt[i]) return axes登录后复制In [46]work_path = 'work/model'X, y = next(iter(DataLoader(val_dataset, batch_size=18)))model = dhvt_tiny_cifar_patch2()model_state_dict = paddle.load(os.path.join(work_path, 'best_model.pdparams'))model.set_state_dict(model_state_dict)model.eval()logits = model(X)y_pred = paddle.argmax(logits, -1)X = paddle.transpose(X, [0, 2, 3, 1])axes = show_images(X.reshape((18, 32, 32, 3)), 1, 18, pred=get_cifar10_labels(y_pred), gt=get_cifar10_labels(y))plt.show()登录后复制
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).登录后复制
登录后复制
相关攻略

Trae在Python数据分析与机器学习项目中主要通过四种方式提供支持:利用Auto模式自动生成并执行端到端分析脚本;通过AgentCLI命令行自动化机器学习建模流程;对现有代码进行智能调试与优化;借助语音交互快速构建数据处理函数。这些功能覆盖了从需求描述到代码生成、模型构建及代码优化的全流程。

在Python编程中,你是否也曾编写过类似的统计代码? 统计词频 count = {} for word in words: if word in count: count[word] += 1 else: count[word] = 1 实际上,这种高频的计数需求,完全可以通过Python内置

Trae稳定支持Python3 10至3 13版本,3 9及以下版本无法运行。Python3 14处于实验性支持阶段,核心功能可能受限。当存在多个3 10以上版本时,Trae优先选择虚拟环境中的解释器,其次为最高系统版本。此外,Trae仅兼容64位Python解释器,不支持32位架构。

在企业级数据采集与自动化运维实践中,IT团队普遍面临一个核心挑战:Python爬虫为何频繁报错,修补维护何时才能终结?随着前端技术演进与动态反爬机制的日益复杂,依赖DOM解析的传统爬虫脚本往往陷入“部署即过时,运行即异常”的困境。本文将深入解析传统爬虫代码脆弱性的根本原因,并系统介绍一种能够重塑数据

很多刚接触Docker的开发者常有一个误解:制作镜像不就是把源代码打包进去就行了吗?实际上,在企业级的标准化开发流程中,直接将源码打包进Docker镜像是非常不专业的做法。这会导致镜像体积臃肿、引入潜在安全风险,并且模糊了“构建环境”与“运行环境”的边界。本文将深入解析Java、Vue、Go、Pyt
热门专题







热门推荐

现货持有者坚守仓位,比特币接近115,000水平 近期比特币(BTC)价格接近$115,000水平,市场整体情绪谨慎,但现货持有者依旧坚守仓位,显示出一定的多头信心。 市场现状与资金流动 那么,当前市场的资金究竟在如何流动?分析显示,一个有趣的现象正在上演:短线资金的流入其实相当有限,市场热度并未急

目录 要点介绍:分析师称XRP呈现“最强看涨结构”高位清算集中于2 90美元以上区域 周四,XRP价格稳稳站在了2 80美元上方。这个位置守住了,意味着什么?意味着市场向那个经典的“杯柄形态”目标价——6美元以上——又迈进了一步。 要点介绍: 先看几个核心数据:周四XRP报收2 82美元。技术分析显

近期,以太坊(ETH)衍生品市场经历了短暂的闪崩,但随后价格快速企稳,交易者开始关注关键突破点——$4,500水平。 ETH衍生品市场现状 市场情绪往往在剧烈波动后显露真容。从最新的链上数据和期权、永续合约的交易情况来看,那场短暂的闪崩更像是一次压力测试——结果是,市场波动率显著下降,多空力量似乎进

DOGE单日暴涨11%,交易量激增四倍,市场风向变了? 最近,加密货币市场又热闹起来了。DOGE(狗狗币)上演了一出“旱地拔葱”,价格单日暴涨11%,更关键的是,成交量直接翻了四倍。这种“价量齐升”的场面,无疑给整个迷因币板块打了一针强心剂,市场情绪肉眼可见地回暖了。 DOGE价格拉升原因分析 那么

如何安全获取欧易(OKX)官方APP?一份详尽的下载与使用指南 Binance币安 欧易OKX ️ Huobi火币️ 当人们谈论“欧易易欧”时,指的往往是那个全球顶尖的数字资产交易平台——欧易(OKX)。作为业务版图庞大的行业巨头,其官方APP无疑是用户进行交易、查看行情和管理资产的核心工具。不过,