2025年3月28日,缅甸中部遭遇7.7级强震,导致数千人遇难。震后,新加坡民防部队的“狮心行动”搜救队伍迅速赶赴重灾区。除了我们熟知的搜救队员和搜救犬之外,这支队伍中还出现了一支特殊的“编外力量”:10只经过特殊改造的马达加斯加发声蟑螂。
这标志着人工改造昆虫首次被部署至真实的搜救任务中。这项技术源自新加坡南洋理工大学佐藤裕孝教授的团队。他们让体长约6厘米的蟑螂背负一枚微型电子背包,其中集成了红外摄像头、传感器、微型控制器和通信模块。
这支“蟑螂特遣队”肩负的任务,是深入人类和常规搜救机器人均无法触及的狭窄废墟缝隙。它们负责采集热信号、二氧化碳浓度以及微弱运动等信息,通过机器学习算法初步判断生命迹象,再将数据通过无线方式回传至地面指挥中心。
最近,该团队在《自然-通讯》期刊上发表论文,介绍了一种可穿戴的“蟑螂潜水服”。穿上这套装备后,蟑螂能在水下持续作业2到3小时。试想一下,一只被先进科技武装、近乎“上天入地无所不能”的“小强”,在同时存在瓦砾与积水的复杂灾害现场,将能发挥出何等独特而关键的作用。

(来源:Hirotaka Sato Group)
半机械蟑螂:既要存活,更要执行任务
赛博格昆虫,简而言之,是活体昆虫与微电子技术的融合体。控制这类半机械蟑螂按人类指令运动,其原理并不复杂。佐藤裕孝团队在其触角末端和腹部第三节,分别植入了镀特氟龙银线电极,用以向神经系统发送微弱电脉冲。这像是向蟑螂传递了“身体某侧受到威胁”的虚假信号,其中枢神经接收后,会本能地驱使身体向反方向移动。
研究人员采用一块10毫米见方的定制电路板作为无线刺激模块,仅需3至4伏、持续0.6秒的电压脉冲,即可有效控制蟑螂的前进与转向。其内置的锂电池一次充电可支持数小时作业。在这套系统中,人类只需发送方向指令,无需直接驱动肌肉、关节或感知系统,蟑螂在生物学意义上依然是完整的活体。
然而,挑战在于:陆生昆虫没有肺,呼吸通常依赖位于胸部的气门。空气经由气门直接进入体内的气管网络,氧气通过扩散方式抵达组织细胞。一旦气门没入水中,蟑螂会在两分钟内窒息。这严重制约了半机械昆虫执行水下任务的能力。
为解决此难题,研究团队为蟑螂量身打造了一套可穿戴的自产氧潜水服。
其核心是一个化学产氧模块。潜水服的反应舱原理,源自高中化学的经典反应:二氧化锰在中性条件下,能自发催化过氧化氢分解。这一过程无需任何电子元件或外部能源,产物仅为无害的水和氧气。
为控制反应速率,防止剧烈气泡干扰蟑螂运动,研究人员将二氧化锰粉末填充进一块亲水纤维素海绵,使反应在固-液微界面上分散进行,从而将产氧速率降至适宜水平。
团队还在反应舱顶盖嵌入一层疏水聚四氟乙烯微孔膜,仅允许气体通过,同时防止了液体渗漏和二氧化锰粉末逸出。红外热成像显示,反应过程中,舱体温度始终稳定在23.6至24.0摄氏度之间,未出现局部热积聚。团队对5只穿戴潜水服的蟑螂进行了为期3天的观察,结果全部存活,行为表现完全正常。
研究人员采用弹性树脂作为3D打印材料,制造出厚度约1毫米的包裹性防水外壳,该外壳同时兼作氧气储运舱。最初,团队尝试将产氧模块安装在蟑螂背部,但发现这改变了重心,且水下阻力过大,导致蟑螂频繁侧翻。最终方案是将产氧舱定位在腹部末端,通过锥形壳体与腹部相连。壳体前端与蟑螂第一腹节之间,采用弹性丁腈橡胶膜进行密封,这既实现了防水,也适应了个体尺寸差异及运动中的身体形变。
蟑螂的两对胸气门结构存在差异:前胸气门是可见的凹槽形气门瓣;中胸气门则仅为一个微小孔洞。为同时向两对气门输送氧气,团队设计了两种不同规格的3D打印硅胶连接器:前胸气门连接器是一个完全包裹气门瓣的匙形罩盖;中胸气门连接器则是一根内径0.3毫米、外径0.4毫米的细管,直接插入小孔内。四根硅胶导管将产氧舱与两对气门相连,构成一个密闭的供氧通路。
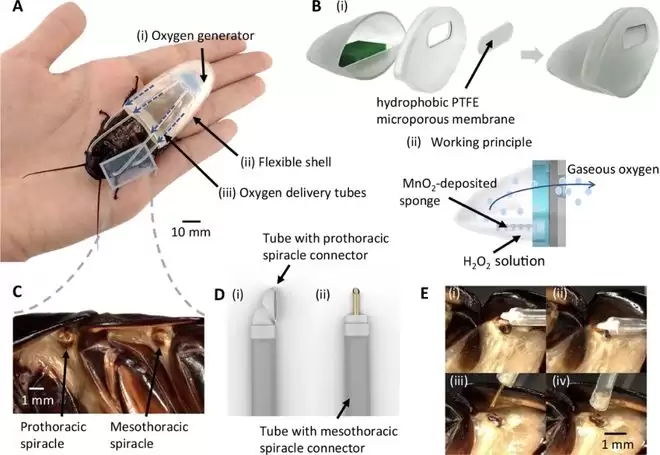
图 | 蟑螂潜水服的输氧系统(来源:Nature Communications)
穿上潜水服后,蟑螂体内的氧浓度峰值可达约50%,3小时后仍维持在约14.8%的水平,这远高于昆虫维持正常生理功能所需的5%氧浓度下限。
在运动灵活性方面,穿戴潜水服的蟑螂在陆地上的平均前进速度为87.5毫米/秒,水下仅微降至78.4毫米/秒。不过,其转向速度受水下阻力影响较大。若按体长比例计算,这类潜水服蟑螂在陆地和水下的运动速度,均已优于当前大多数两栖机器人。
整套潜水服重量不足6克,再加上经防水处理后仅重0.7克的电子背包,总负载仍远低于蟑螂所能承受的最大负重。
为验证这套系统在真实极端场景下的可用性,团队搭建了一条模拟灾难现场的1.7米两栖障碍隧道,前段充满高浓度二氧化碳,后段则浸水。作为对照,普通蟑螂进入二氧化碳段后,仅数秒便失去反应;另一只被引导进入水段后,45秒内即因窒息而完全静止。而穿戴潜水服的半机械蟑螂,则全部成功穿越了两个危险区域,行为正常,步态稳定。
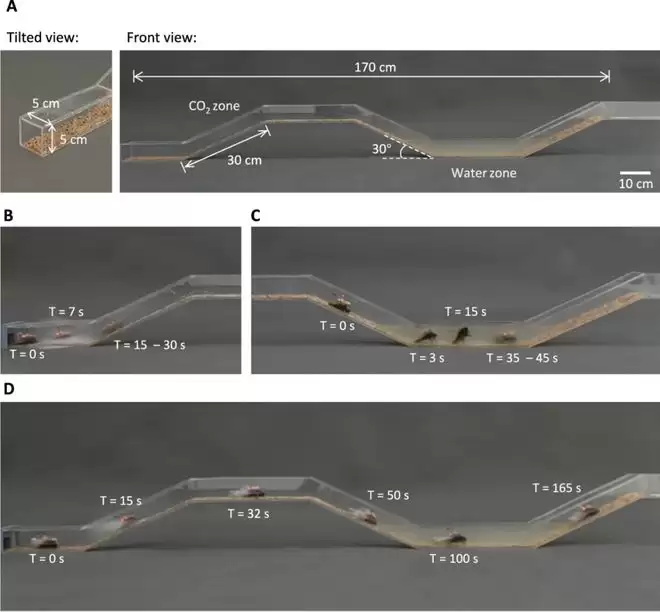
(来源:Nature Communications)
为使蟑螂能钻入更狭窄的水下缝隙,团队还测试了一种“全内置”配置:将控制背包和电池直接植入蟑螂体内。这种配置不仅让蟑螂成功穿越了仅2厘米高的水下裂缝,还因内部质量分布更接近中轴线而降低了重心,减少了水下侧翻的概率。
上天入地,未来或将半机械蟑螂送入外星球
佐藤裕孝对半机械昆虫的研究,其实早在2008年就已启动。当时他在美国加州大学伯克利分校从事博士后研究,主导了一项对花金龟的改造工作,并首次通过植入式无线微系统,远程控制了活体甲虫的飞行状态。这项成果入选了2009年《时代》杂志的“年度50大发明”以及《麻省理工科技评论》的“十大新兴技术”。
(来源:MIT Technology Review)
受2011年日本大地震的触动,佐藤裕孝逐步将研究对象转向了马达加斯加发声蟑螂。这种蟑螂虽然不会飞行,但体格结实,5.5克的身躯可以承载近3倍于自身体重的质量,加之性格相对沉稳,使其成为地面搜救场景的理想生物载体。
佐藤裕孝与合作者陆续对蟑螂进行了一系列改造。2024年,团队开发出可无线充电的蟑螂控制背包,太阳能充电模块的加入,使得半机械蟑螂具备了长时间户外作业的潜力。
蟑螂一旦“习惯”了反复的电刺激,其响应就会逐渐减弱。2024年,团队提出了一种带有刺激调节和“打破习惯化”功能的导航算法,将持续可控运动时间从半小时延长至2小时以上,同时将刺激电压降低了25%,减少了因过度刺激导致的疲劳。
单只蟑螂能覆盖的范围毕竟有限。2025年初,团队发表了群体导航算法,引入了一种生物-人工混合的启发式反馈机制。多只半机械蟑螂可在未知复杂地形中协同行进,减少滞留,人工干预次数相比此前算法减少了约50%。
最后,还有改造效率的问题。即使是训练有素的操作员,手工组装一只半机械蟑螂也需要1小时以上。2025年7月,团队在《自然-通讯》上发表论文,介绍了全球首条半机械昆虫自动化装配线。由计算机视觉引导的机械臂,能够识别蟑螂背部的最佳植入位置,自动完成电极植入和背包安装,每只需时仅1分8秒。
既然改造一只活蟑螂如此费时费力,为什么不直接制造一台机械蟑螂机器人呢?
究其原因,昆虫是自然界长期演化的产物,其步态控制、地形适应、快速转向以及感知反馈的效率,远超同等尺寸的微型机械机器人。其次是功耗问题,半机械蟑螂只需搭载传感和低功耗信号刺激等电子元件,就能驱动生物体长时间活动,其功耗和续航能力均优于同类纯机械方案。
但这同时也带来了相应的代价。昆虫的作业范围受限于能使其存活的物理条件。近20年来,佐藤裕孝一直在尝试通过人工改造,让它们适应更多更极端的环境,并保持稳定的可用性。
半机械蟑螂的应用场景,正从搜救领域扩展到基础设施巡检。2025年初,团队启动了一个新试点:将半机械蟑螂送入城市地下管道,检查腐蚀和渗漏情况。
新加坡拥有约6000公里长的供水网络,传统管道巡检依赖人工检测或大型机器人,覆盖率有限。这套配置在原有背包基础上加装了彩色摄像头、LED照明和通信模块。蟑螂在管道底部爬行,摄像头可拍摄管壁,并通过机器学习识别缺陷。
该方案的主要优势在于尺寸:蟑螂可以钻进2厘米宽的缝隙,而大多数机械设备无法做到这一点。项目目前正在新加坡滨海高速公路沿线的模拟管道环境中进行测试,研究人员正在与相关机构商谈将其真正应用于管网的可能性。
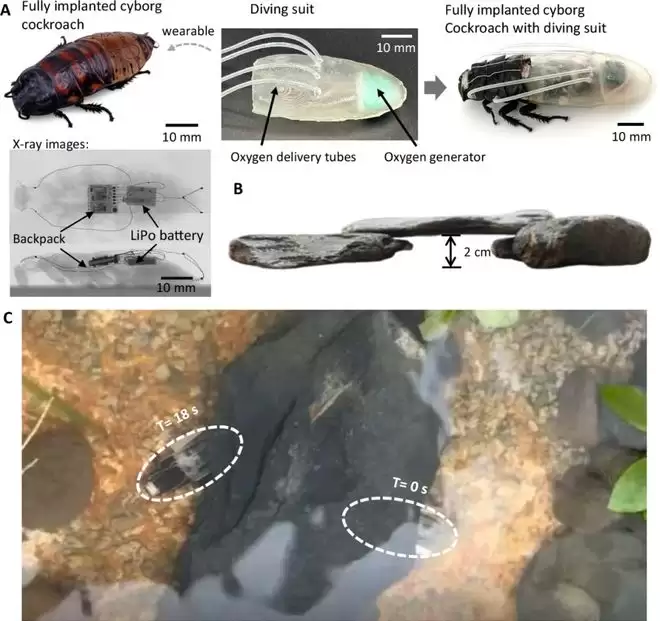
图 | 室外水下狭窄缝隙穿越(来源:Nature Communications)
任何涉及活体动物改造的研究,都会引发伦理讨论。相比脊椎动物,学界对于昆虫是否具有主观痛苦体验尚未达成明确共识。不过,在该实验中,蟑螂的行为和存活指标均未发现异常。论文明确指出,实验蟑螂气门处的黏合剂可以清除,脱下潜水服后,它们能够正常活动。
未来,团队计划继续扩展这套半机械昆虫系统。例如,集成微型氧浓度传感器和微泵,实现按需灵活供氧等功能。此外,在验证了水下场景后,佐藤裕孝计划带领蟑螂走向更极端的环境,比如在极端温度、真空和辐射条件下测试半机械昆虫的生存与作业能力,未来甚至可能将其用于火星等缺氧的地外环境。
作为在地球上繁衍了3亿年的物种,蟑螂或许怎么也想不到,在短短十几年间,它们会被仅有约30万年物种历史的人类改造并操控,实现了某种意义上的“赛博飞升”。
参考内容:
https://www.nature.com/articles/s41467-026-74235-1
https://hirosatontu.wordpress.com/
https://www.technologyreview.com/2009/02/24/215689/the-10-emerging-technologies-of-2009/




