在智能驾驶技术飞速发展的今天,行业变革正被前所未有地加速推进。地平线推出的HSD V2.0系统,无疑是当前高阶智驾领域最受瞩目的技术突破之一。凭借独特的架构设计与持续迭代能力,它正重新定义智能驾驶的技术边界。这套系统的核心逻辑,是从“被动响应”彻底转向“主动预判”,而实现这一跨越的关键,在于深度融合了世界模型与端到端强化学习。

以往的模块化智驾系统,感知、决策、执行彼此独立,难以协同。而HSD V2.0的思路截然不同——它构建了一个统一的底层模型架构。最大的变化在哪里?原本仅用于NOA领航辅助的Occupancy Network(OCC)网络,如今被全面扩展至AEB自动紧急制动、AES自动紧急转向、AMAP加速踏板防误踩等所有主动安全场景。这意味着什么?系统不再依赖传统的“白名单”来识别物体,而是通过共享基础模型与海量高精度合成场景数据训练,使对异形障碍物的感知变得异常精准。换言之,这套主动安全系统的泛化能力大幅增强,面对复杂多变的道路环境,其风险感知与决策能力实现了显著提升。
从技术演进路径来看,HSD V2.0完成了一次端到端技术的深度进化。如果说1.0版本实现了全场景通用驾驶能力,那么2.0版本的核心升级,就在于采用双引擎驱动——世界模型提供空间与时间理解能力,端到端强化学习优化动态决策——让系统具备深度推理行车环境、动态预判风险的能力。这不再只是“感知-决策-执行”的线性流程,而是一个能自主推理的智能体。它在物理空间、动态动作与全域风险这三个维度上,均实现了认知层面的跃迁。
智能驾驶竞赛进入下半场,行业焦点早已从架构创新转向迭代效率与工程能力的综合比拼。地平线的策略是构建一个物理世界基座模型的正向迭代闭环。具体而言,以真实道路上的专家驾驶数据为基础,结合世界模型生成各类长尾场景,再通过强化学习反哺模型优化。这套“数据-模型-场景”的闭环进化链条,使HSD系统具备了自主学习能力,能够持续缩小人机驾驶差距。无论是行泊车、安全防护,还是常态与极限工况,全场景能力都能同步提升。
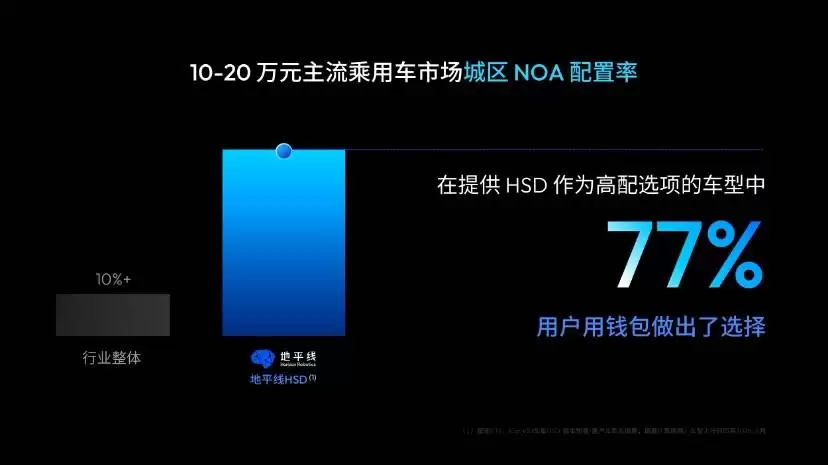
市场反馈最能说明问题。在配备HSD系统的车型中,77%的用户主动选择了搭载版本,智驾里程占比接近50%。这一数字背后,是用户对系统可靠性的高度信任。另一个值得关注的数据是,HSD的系统响应时延比行业平均水平缩短了34%。这得益于软硬协同的深度优化——从环境感知到动作执行,全链条效率提升,使系统在极限工况下也能从容应对。
支撑HSD持续进化的,是地平线十一年来的技术积淀。近三年,公司在国际顶级学术会议上发表论文超50篇,学术引用超过10万次,全球专利申请突破2000件。研发体系涵盖通用AI、具身智能、智能体、声学四大实验室,形成了多学科交叉的技术矩阵。这些积累为HSD系统构建了可持续演进的技术底座。在端到端时代,它突破了工程师定义规则的天花板,通过数据驱动,持续提升能力上限。
智能驾驶正进入一个数据与训练决定能力上限的新阶段。HSD系统的进化路径,为行业提供了重要参照。通过构建自主进化体系,地平线正在推动高阶智驾从“可用”向“好用”转变。或许用不了多久,辅助驾驶技术就会真正融入人们的日常出行场景,成为那个平常却又不可或缺的存在。




