最近,技术圈内频繁被提及的一个热门话题,就是物理AI、世界模型以及它们与数字孪生之间的复杂关系。尽管讨论热烈,但能清晰阐释两者关联的讨论较为稀缺。这并非纯粹的学术探讨。对于从事数字化转型、工业软件、智能制造以及IT咨询的专业人士而言,迟早会在实际项目中与这些概念相遇。当前,很多人对这些术语的理解存在混淆:物理AI、具身智能、空间智能、世界模型,听起来似乎相近,但实际上各有侧重,其内在的逻辑关系也截然不同。本文旨在厘清这些概念的底层逻辑,并揭示一个更重要的趋势:数字孪生的核心范式正经历一次根本性的转变。
核心观点:
核心观点1:物理AI的实现,离不开各类传感采集器等核心AI硬件能力的支撑,例如AI眼镜、AI声音采集设备。这些硬件构成了物理AI的坚实基础。具身智能的关键在于,它能让物理AI形成完整的闭环。物理AI能实时、快速地认知并建模现实世界,进而对现实世界做出具体行动,这个闭环的形成必须依靠具身智能的协助。此外,类似李飞飞团队研究的空间智能,旨在让AI完全感知真实的三维空间,这理应成为物理AI的一项核心能力。
核心观点2:世界模型并非以人为中心,而是以AI为中心,致力于构建一个现实物理世界与抽象数字虚拟世界高度融合的统一体。相较于数字孪生,其更关键的区别在于:AI在其中扮演了“大脑”的角色,具备自我学习、自我进化与预测的能力。这是区别于传统数字孪生的核心所在。传统数字孪生只强调了现实与虚拟世界间的映射与同步,并未强调存在一个能自我学习、进化与预测的AI大脑。因此,总结核心要点有二:一是以AI为中心构建AI大脑,二是赋予系统自我学习与进化的能力。
1. 当前的AI,存在哪些短板?
要理解这波技术浪潮,首先需要明确一个问题:当前的大模型,其能力边界究竟在哪里?
过去几年我们看到的大语言模型、文生图、文生视频等能力,都局限于数字世界。它们处理的是文字、像素与代码,从未真正接触过物理世界。它们能撰写出有理有据的分析报告,但对于“将一个杯子推到桌边会发生什么”这类问题,其实是在“猜测”,而非真正的“理解”。
这正是当前AI最大的短板——缺乏对物理世界的常识性认知。
它能识别成千上万种物体,却无法预判推动桌子时,桌子会向哪个方向移动。它能理解指令,却不知道拧开瓶盖需要施加多大的力。这并非参数规模的问题,而是训练数据与学习范式的根本性缺失——语言数据不包含重力,图像数据也不包含摩擦系数。
在2026智源大会上,智源研究院院长王仲远提出了一个精准的判断:机器人“能识别物体,却不懂‘推杯子会掉’”;能听懂指令,却无法预判‘拧瓶盖需要多大的力’”。这并非比喻,而是当前物理AI领域需要解决的真实问题。
这一问题的存在,正是促使“物理AI”这一方向出现的根本原因。
2. 物理AI:让机器真正“理解”物理世界
物理AI的核心目标,在于为机器人、智能装备、自动驾驶汽车等硬件赋予其感知、理解、预测与交互物理世界的能力。
请关注三个关键词:感知、预测、交互。
感知依赖什么?依赖传感器。深度摄像头、力觉传感器、激光雷达——这些硬件并非附属品,而是物理AI的“皮肤与视网膜”。缺乏对物理世界的实时数据采集,再强大的算法也只能在真空中运行。
预测依赖什么?依赖对物理规律的建模。物体受力后如何运动、材料变形的临界点在哪里、两个物体碰撞后的轨迹是怎样的——这些都需要AI真正学习物理规律,而不仅仅是记住物理公式。
交互依赖什么?这就要引出接下来要讨论的“具身智能”。
物理AI解决的是“大脑是否具备物理知识”的问题。但仅有知识还不够,这个大脑还需要一个“身体”来承载。
3. 具身智能:为物理AI赋予“身体”
具身智能强调,智能体必须拥有一个物理实体,并借助这个实体与物理世界进行实时感知、交互与学习。它不仅仅是一个算法,而是一个完整的系统——拥有眼睛(传感器)、肌肉(执行器)、神经系统(控制器),形成一个“感知—决策—执行—反馈”的完整闭环。
物理AI与具身智能的关系,实质上就是“大脑”与“身体”的关系。
这个关系中存在一个关键逻辑:没有身体,大脑无法形成闭环。物理AI可以离线推演、进行事后分析,但要在毫秒级时间内完成“感知现实—理解场景—做出决策—执行动作—接收反馈—修正模型”这一整套流程,必须依赖具身智能所提供的物理载体。
在2026年6月的智源大会上,智源研究院孵化的具身智能公司星源智发布了一款名为ω-EVA的模型,其名称源自Envision(预演)、Verify(验证)、Act(行动)三个单词。在发布现场,他们通过“华容道”这一案例阐释了该模型的核心逻辑:对人类而言,华容道是逻辑推理;对机器人而言,它则是连续的行动——每移动一步,局面都会变化,后续路径也相应地被重塑。机器人真正需要判断的,不仅仅是“眼前是什么”,更是“如果我这样移动,接下来会发生什么”。
这个案例揭示了具身智能的本质:它让物理AI从“纸上谈兵”转变为“实战演练”。其核心并非让机器人直接输出动作,而是先生成动作候选方案,再由世界模型预演该动作可能导致的后果,然后根据这些后果修正动作。没有具身智能,物理AI只是一个能推演但无法行动的理论家;有了具身智能,物理AI才具备了试错、适应与进化的能力。
4. 空间智能:补齐三维理解的短板
拥有了物理知识和身体,还缺少什么?
缺少的是对三维空间的真正理解。
斯坦福大学李飞飞教授有一个准确的判断:当前的AI被困在由文本和二维图像构成的“扁平世界”里,与立体的、受物理规律支配的现实世界严重脱节。AI在估算距离、方位、尺寸,或进行“心理旋转”等任务时,其表现近乎随机——它们看不懂迷宫,识别不了捷径,也难以预测基本的物理后果。
空间智能所要解决的,正是让AI理解三维空间中物体的几何关系、位置距离与物理边界。这不仅仅是“看到”一张图片,而是“理解”一个三维场景——知道物体在哪里、有多大、相互之间是什么关系、是否存在遮挡、运动轨迹如何。
可以将空间智能理解为物理AI的“世界坐标底图”。没有这张底图,物理AI的推演就缺乏空间锚点,如同一个人懂得物理公式却不知道自己在何处。有了这张底图,物理AI才能在上面叠加力学模型、运动轨迹与因果链条。
5. 世界模型:AI的“内心沙盘”
现在,我们可以将前面三个概念串联起来了。
物理AI提供了物理知识,具身智能提供了身体与闭环,空间智能提供了三维空间理解——而世界模型,则是将这一切整合进一个统一的“内心沙盘”,使AI在采取实际行动前,先在脑海中推演各种可能性。
世界模型的核心并非通过语言或图像“描述”现实,而是通过大量数据学习现实世界的物理规则,进行因果推理,从而预测并生成符合现实规律的未来状态。
用更直白的话来说:世界模型赋予了AI“预演”的能力。
人类在做决策时,常常会在脑海中预演——“如果我这样做,会发生什么?”这种反事实推理能力,正是世界模型试图赋予AI的。它让AI在实际行动前,先在内部模拟环境中运行成百上千种方案,选出最优解,再付诸实施。
王仲远在智源大会上将世界模型的技术路线划分为四类:以语言为中心的VLA路线、以像素为中心的视频生成路线、以三维结构为中心的仿真路线、以视觉表征为中心的JEPA路线。这些路线各有利弊,技术方向尚未完全收敛。业界普遍认为,这个领域仍处于早期阶段,有人将其比作“2012年深度学习刚兴起的时候”。但方向已经非常清晰。
6. 数字孪生要被取代了吗?先理清这个关键问题
讲到这里,很多人会问:世界模型和我们原有的数字孪生,究竟是什么关系?是替代还是升级?
我们先给出一个判断:不是替代,而是范式转换,并且两者在相当长一段时间内将是共存关系。
先看传统数字孪生在做些什么。它是物理世界中特定实体的“高精度数字复制品”,追求与物理实体的实时同步与精确映射。一座工厂、一台设备、一条生产线——数字孪生的逻辑是“物理世界发生了什么,数字世界就记录什么”,本质上是“照镜子”的过程,是一种事后同步。
而世界模型的逻辑则完全不同。它是用神经网络从数据中“学习”出来的环境动态函数,不依赖预先定义的规则,能够生成从未出现过的真实场景。它不是记录现实的“档案柜”,而是能想象新场景的“大脑”,是一种事前预演。
这两个差异可以归结为两个核心转变。
第一个转变:从以人为中心,到以AI为中心。
传统数字孪生的最终呈现对象是人——工程师看大屏,管理者看报表,通过漂亮的可视化界面让人类感知“数字世界的状态”。
而世界模型的首要目标是让AI智能体能够进行思考和预演。这个世界里甚至不需要人类视角的光影效果,只需要物体的质量、摩擦系数、惯性张量等物理参数。服务对象发生了根本性的变化。
第二个转变:从静态映射,到自我学习进化。
数字孪生的“进化”依赖于人工版本迭代——工程师从V1.0升级到V2.0。而世界模型的进化是实时的、自主的——当真实世界在执行动作后出现意料之外的偏差,世界模型会立刻修正自身的物理参数,通过具身智能的闭环反馈实时写入“大脑”。
但这里需要特别说明:将数字孪生与世界模型对立起来是不准确的。实际情况是,世界模型需要数字孪生所积累的物理参数与历史数据作为训练基底。在工业场景中,许多企业已经拥有多年的数字孪生积累——设备运行数据、工艺参数、故障记录——这些数据正是训练物理AI世界模型的宝贵原料。
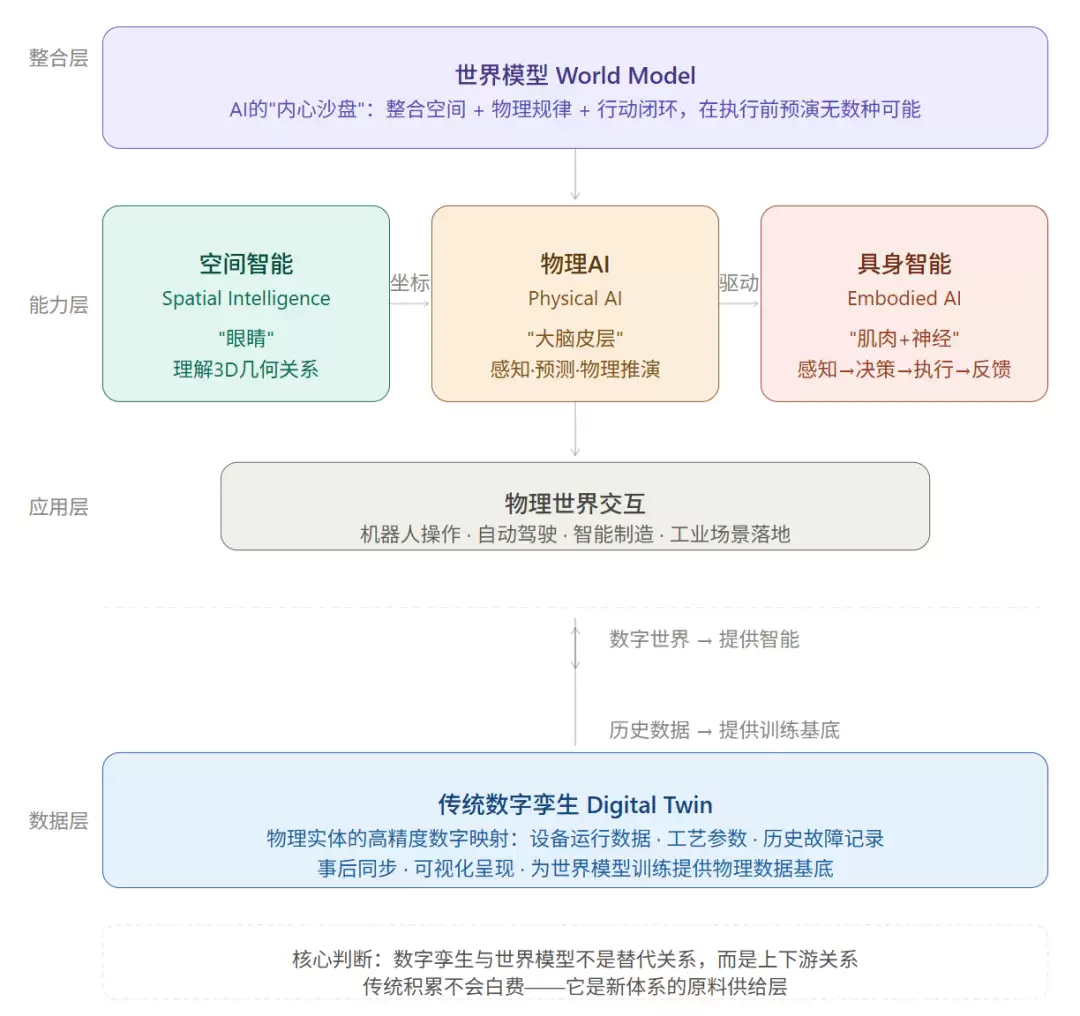
用一句话总结:传统数字孪生是物理世界向数字世界提供数据,世界模型是数字世界向物理世界提供智能。两者并非替代关系,而是上下游关系。
7. 这波浪潮目前发展到什么阶段?
概念说完,我们来谈谈现实情况。
在市场规模方面,不同机构根据不同口径有着不同的测算。根据MarketsandMarkets的预测,全球物理AI平台与软件市场将从2026年的约15亿美元增长到2032年的152亿美元左右,年复合增长率接近50%。如果按更宽的口径,将AI赋能的机器人、自动驾驶、工业自动化全部计算在内,市场规模将扩大很多倍。在具身智能机器人这一细分赛道上,多家机构预测未来五到十年将进入高速增长期,但各家预测数字差异较大,仍需关注实际落地情况。
英伟达CEO黄仁勋多次公开判断,物理AI有望撬动数万亿美元级别的实体经济。其逻辑很简单:制造业、物流、医疗等实体行业的规模,远大于互联网经济的想象空间。
但挑战同样巨大,而且这些挑战是真实存在的、不容忽视的。
最大的挑战是数据。物理AI训练需要的是带有时空关联的高质量物理交互数据,这类数据获取成本极高,规模极其有限。相比之下,语言模型可以用海量互联网文本来训练,但物理交互数据没有这种天然积累。只能通过仿真环境和合成数据来弥补,但仿真与真实之间的“迁移失真”问题至今没有完美的解决方案。
第二个挑战是中国的真实处境。英伟达在这个方向上已有系统性布局——Cosmos世界基础模型平台、Omniverse仿真环境——形成了从合成数据生成到硬件部署的相对完整的生态。国内近两年在具身智能硬件端有一定进展,宇树、智元等在机器人本体出货量上发展较快,但在世界模型基础能力和仿真生态方面,与英伟达的差距是客观存在的。这并非悲观,而是需要正视的现实。
第三个挑战是应用端的成熟度。当前具身智能的产业阶段,类似于“2015、2016年的自动驾驶”——方向明确,但距离真正实现规模化商业落地,还有相当长的路要走。许多现在看起来惊艳的演示,距离稳定可靠的工业部署还相差甚远,鲁棒性、安全性、可解释性都面临着严峻挑战。
8. 对于数字化转型项目,真正应该关注什么?
最后这部分,我们来谈谈这波浪潮对IT从业者和数字化转型项目意味着什么。
第一,已有的数字孪生积累不会白费,但需要评估其再利用的价值。
过去建设了工厂数字孪生、设备数字孪生的企业,手中握有大量的物理数据。这些数据在物理AI时代将成为重要资产。但问题是,当前许多数字孪生的数据标准、采集密度和格式,并非按照物理AI训练的需求来设计,后续的数据治理与改造成本不容忽视。
第二,短期内不要盲目追逐“世界模型”这个热词,而应关注具体的落地场景。
世界模型目前仍处于早期阶段,对于大多数企业而言,直接做世界模型的项目可能是一个伪需求。近期真正值得关注的是其两个具体应用方向:一是用于预测性维护和设备健康管理的物理仿真模型;二是在工业机器人控制中引入强化学习和仿真训练,以减少对人工示教的依赖。这两个方向的技术成熟度相对更高,落地可能性也更真实。
第三,咨询顾问和方案人员需要真正吃透这套概念体系。
在与不少同行交流时发现,很多人将物理AI、具身智能、数字孪生等概念混为一谈,方案里写得天花乱坠,但一经追问具体技术路线就含糊其辞。在甲方技术团队越来越专业的今天,这种情况将越来越难以为继。只有先吃透这套概念的底层逻辑,才能在项目中为客户提供有价值的判断,而不是盲目追逐热词。
结语
从物理AI到具身智能,从空间智能到世界模型,这四个概念构成了一个完整的体系:空间智能是“眼睛”,负责看清三维世界的坐标与轮廓;物理AI是“大脑皮层”,负责理解力学因果、预测物理后果;具身智能是“肌肉与神经系统”,负责执行动作、接收反馈、形成闭环;世界模型则是“完整的内心世界”,它将前三者整合成一个动态的、可预演的认知沙盘。
而传统数字孪生在这个体系中并未消亡,它扮演着基础数据层的角色,是这套新体系的原料供给者。范式变了,但积累没有白费。
这场变革的本质,不仅仅是技术的升级,更是从“被动记录”到“主动认知”的范式转换。数字世界不再仅仅是物理世界的影子,而是开始成为物理世界的“大脑”。
这不是三五年内就能全面落地的事情,但其方向已经非常清晰。现在所做的每一步数字化积累,都将成为这个未来的基础。因此,看懂这个趋势,比盲目追逐热词更为重要。




