无人机在既定路径上飞行不是什么难事,导航软件就能搞定。但要让它在复杂多变的环境里高速自主穿行,事情就变得复杂多了——关键在于轨迹规划算法。这类高性能方案通常依赖昂贵的商业凸优化求解器,价格动辄数十万美元。开源替代品虽然能降低成本,但性能短板明显,部署门槛也不低。
今天要介绍的工作,来自麻省理工学院航空航天控制实验室与宾夕法尼亚大学的联合团队。他们开发了一款名为 MIGHTY 的开源轨迹规划器,搭载在仅靠机身小型计算机的小型四旋翼上,就能在堆满杂物的室内高速穿梭、精准避障并安全降落。性能测试显示,它的多项指标能追平甚至超越商业方案。相关论文已发表在《IEEE 机器人与自动化快报》。

(来源:Aerospace Controls Lab)
规划器设计的两难取舍
轨迹规划的核心,是在极短时间里精确算出空间曲线、各时刻的速度、加速度及其高阶导数。而无人机的自主飞行需要空间和时间的联合优化,这两者的耦合会显著增加求解难度。长期以来,研究者只能在计算精确性和速度之间做取舍。
主流方案有两条路线。一条是 B 样条参数化,利用样条曲线的局部支撑特性和凸包性质。它的优势在于局部控制:改动一个控制点,只影响曲线的有限邻域,非常适合实时的局部重规划。代表工作当属浙江大学高飞团队 2019 年推出的 Fast-Planner 和后续的 EGO-Planner,后者因进一步降低计算开销,成为近年引用和复现最多的开源规划器之一。
另一条是分段多项式参数化,以 2011 年宾大 Kumar 团队提出的 Minimum Snap 为起点。高飞团队在此基础上发展出 MINCO 参数化框架,被 GCOPTER、SUPER 等高性能规划器采用。MINCO 实现了时空联合优化,数学结构紧凑,求解效率高。但它的各个参数无法独立优化,搜索空间被限定在一类特定的轨迹族。如果任务对中间节点的速度或加速度有具体要求,这类规划器就有些力不从心了。
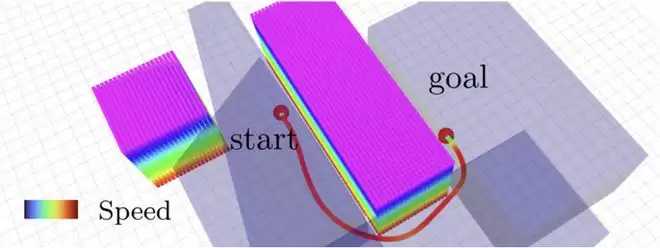
图 | 简单角落避障基准场景(来源:DOI: 10.1109/LRA.2026.36811)
所以研究团队的思路很清晰:能不能同时保留两条路线的优势?既不牺牲时空联合优化的精度,又能获得节点级别的局部控制能力。
用 Hermite 样条重构问题
答案是把 Hermite 样条作为 MIGHTY 的轨迹表示。Hermite 样条在视觉 SLAM 等领域已有成熟应用,但将其作为四旋翼轨迹规划的核心优化基底,还是一次创新尝试。
MIGHTY 采用五次 Hermite 样条:整条轨迹被切成若干段,位置 p、速度 v、加速度 a 是每段两端节点上的显式优化变量,每段持续时间 T 也纳入优化范围。相邻段之间通过共享节点上的状态值,自动实现位置、速度、加速度的连续表征,无需额外等式约束和全局耦合。
这带来一个关键优势:规划器可以独立指定某个节点的特定速度、加速度方向,同时不影响其他节点。对于需要悬停、或要求以特定速度通过某区域的任务,这种节点级别的精细控制能力至关重要。
论文二作、宾大电气与系统工程系博士生吴雨薇告诉 DeepTech,团队比较过很多主流参数化方式,各有优势。但从他们关注的局部轨迹优化角度出发,Hermite 样条在表达能力、局部控制能力和优化效率之间找到了最好的平衡。她强调,MIGHTY 并非碘伏现有框架,而是在此基础上的进一步探索。
把理论问题变成可解的工程问题
工程实现层面,团队解决了两个棘手问题。
第一个是数值稳定性。某段轨迹时间过短时,目标函数对速度、加速度的梯度会出现 1/T 和 1/T² 等因子,不同优化变量尺度差异过大会影响求解。MIGHTY 的做法是引入缩放变量,将原始速度 v 替换为 T̄·v(T̄ 是相邻段时间的平均值),加速度也做类似变换。这一策略不改变最优解,但显著改善了梯度条件。消融实验显示,引入缩放后计算速度提升至原来的 2 倍,轨迹的加速度变化率更低,飞行时间和路径长度几乎不受影响。
第二个是计算效率。Hermite 样条能保证连续性,但在它的基函数上直接算高阶导数和代价积分相对繁琐。MIGHTY 采用切换策略:优化在 Hermite 表示下进行,自动满足连续性;代价函数则换算为等价的贝塞尔表示,充分发挥其基函数权重可预计算的优势,采样点求值只需少量点积运算。两种表示之间通过一个仿射映射相连,整个过程梯度都有闭式解,无需数值微分。
吴雨薇向 DeepTech 解释道:“对于轨迹优化问题,求解器固然重要,但很多时候,解的质量和求解效率更取决于问题构造本身——包括轨迹参数化、代价函数设计和变量尺度处理。团队希望通过更好的问题构造,让轻量级的开源求解器也能获得很好的性能。” 此外,MIGHTY 先做初始猜测再优化,无需每次从零生成轨迹,这使得它在某些场景下比商业求解器更快。
性能验证与能力边界
仿真和真机实验的结果相当扎实。在复杂场景下(24 个目标点、5 种速度限制),与 GCOPTER 相比,MIGHTY 的计算时间平均缩短 9.3%,飞行时间缩短 13.1%,路径长度缩短 1.4%,全部测试无碰撞。GCOPTER 在 jerk 指标上更优,但研究者通过调节平滑权重,使 MIGHTY 也能达到同等水平,同时还维持了更短的飞行时间。
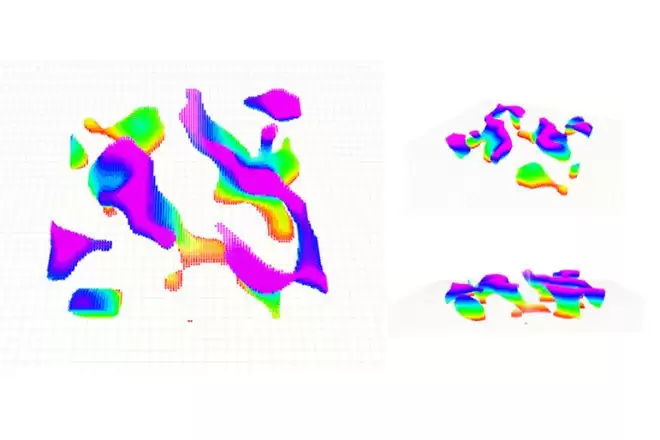
图 | 复杂场景基准对比图
最能体现 Hermite 参数化优势的是局部高阶控制测试。在轨迹的倒数第二个节点上施加位置和速度参考,要求接近目标位置并归零速度模拟悬停。结果显示,MIGHTY 的位置误差仅为 0.0041m,远优于 GCOPTER 的 0.017m;速度跟踪误差降至 0.16m/s(GCOPTER 为 1.0m/s),飞行时间也缩短了 25.1%。
横向对比方面,在 300 米长、40 米宽的随机圆柱障碍物森林中,MIGHTY 是唯一在 100% 成功率下同时实现最短飞行时间和最短路径长度的方法。
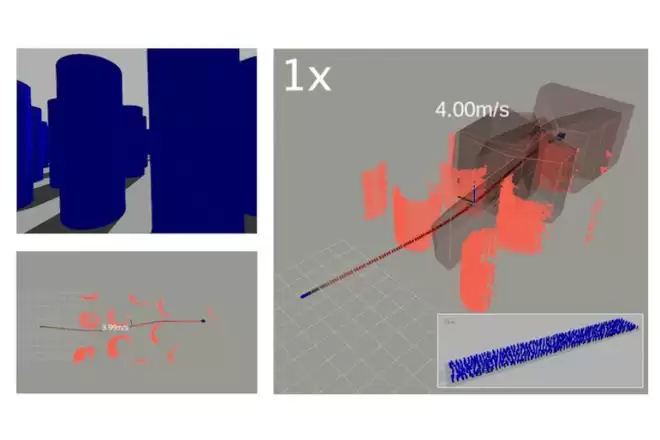
图 | 300 米障碍物森林场景
真机实验在 MIT 完成。无人机搭载 Livox Mid-360 激光雷达与 Intel NUC 13 板载计算机,定位采用 DLIO,底层飞控为 PX4。三组实验——长时间多障碍物穿越、高速飞行测试(实测峰值速度 6.7 m/s)、动态手持障碍物飞行(持续 490 秒)——全部无碰撞完成,验证了 MIGHTY 在真实硬件上的实时性和鲁棒性。
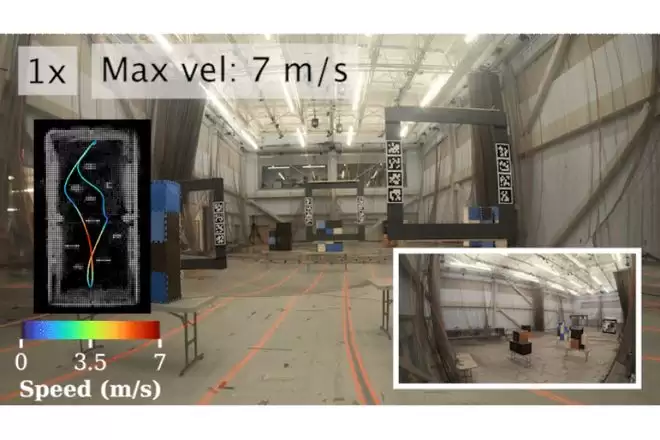
图 | 高速飞行实验序列
不过需要指出的是,吴雨薇坦诚地提到,仿真中的完美成功率是在基准测试环境中取得的。面对高速动态障碍、预测误差较大或环境快速变化等极端情况,规划器仍然可能失败。MIGHTY 解决的是轨迹优化问题,而非从根本上消除动态避障中的不确定性。作为一款高质量局部轨迹优化器,它仍需与全局规划、感知、预测模块协同工作,才能应对真正复杂的环境变化。
开源、应用与下一步
MIGHTY 用开源工具实现了与商业方案相当的性能,目前已公开在 GitHub 上。基于 ROS 2 Humble,支持 Docker 一键部署,提供单机交互、Gazebo 仿真等多种使用模式,大大降低了使用门槛。对大规模部署来说,开源和轻量化的优势会更加明显。
谈及具体应用场景,吴雨薇认为 MIGHTY 最适合多段、复杂、任务导向的轨迹生成。比如地震后倒塌建筑物内的搜救勘察、城市环境下的最后一公里配送、风电叶片等复杂工业结构的检修。这些场景下,无人机需要经过多个中间点、在特定位置悬停、或以特定速度通过某些区域,正是 MIGHTY 擅长的。
对于未来是否扩展到多机协同,吴雨薇指出,大部分局部单机轨迹优化算法都比较依赖初始解的质量,多机协同下这个问题会被放大——每个机器人不仅要避环境障碍,还要在时空上避开其他机器人。多机时空联合优化目前仍是一个有挑战的问题,难点在于优化规模、机器人间的耦合约束,以及实时性和不确定性带来的影响。
话说回来,MIGHTY 通过 Hermite 样条参数化与一系列工程优化设计,兼顾了此前几乎无法同时达成的三大优势:开源、轻量、高性能。随着开源框架的持续完善,高性能轨迹规划能力将不再专属于少数商业方案。在大规模工业部署和学术研究中,无人机自主规划系统有望得到进一步普及。




