基于YOLOv5的目标检测系统,堪称智能制造领域的一把利器。这套方案集成了多项实用功能,无论是处理单张图片、分析视频文件,还是接入实时摄像头流,都能轻松胜任。更重要的是,系统支持普通检测和区域检测两种模式——前者对整个画面进行全局扫描,识别所有可见目标;后者则允许您划定一块或多块“感兴趣区域”(ROI),系统仅在这片区域内执行检测。当计算资源有限,或您只想监控某个关键部位时,区域检测的价值便尤为突出。
普通检测模式与区域检测模式
在普通检测模式下,系统会对整张图像或视频帧进行全面的目标分析,适合那些无需特别聚焦某个区域的场景。而区域检测模式(ROI)通过设定一个或多个多边形区域,将检测范围精确锁定在这些区域内部。这样做的好处十分明显:既能节省算力,又能排除无关背景的干扰。
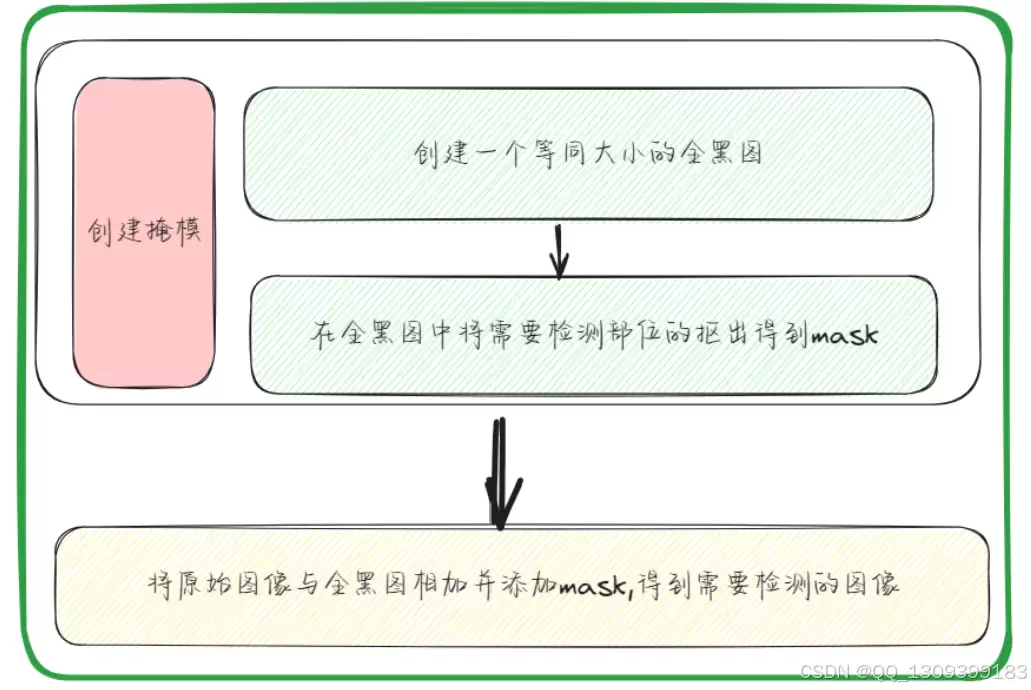
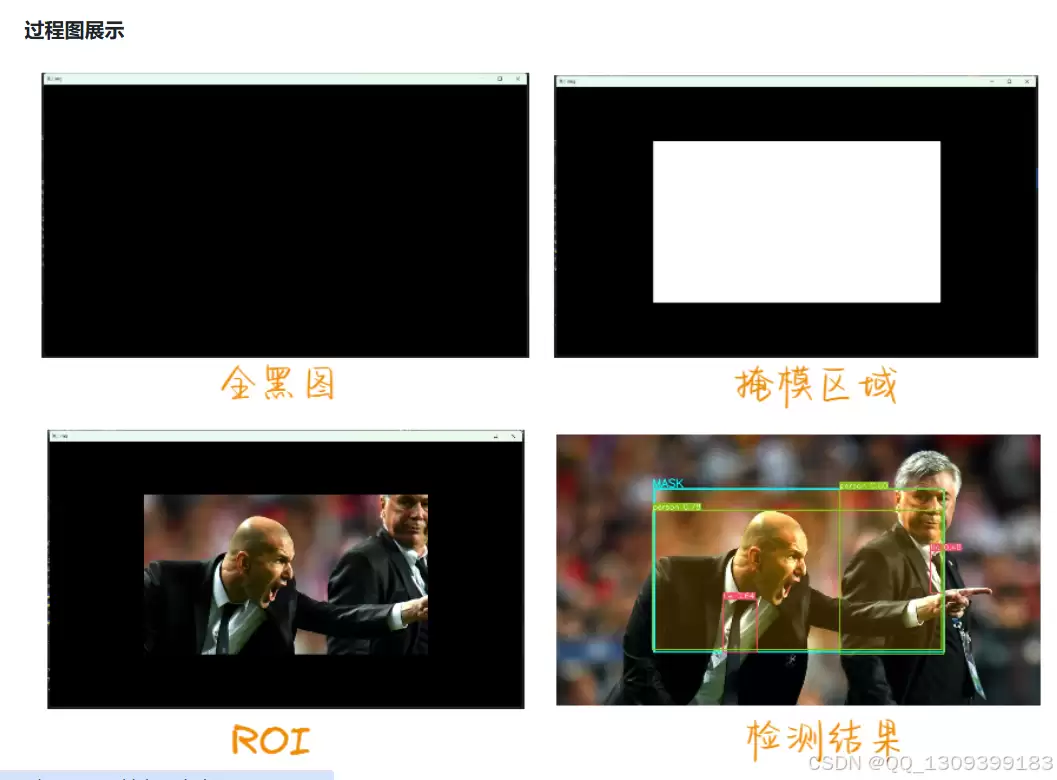
谈到区域检测的具体实现,您已经采用了掩码(mask)的思路来操作。这个方法直观且高效:先定义好感兴趣的多边形顶点坐标,然后借助OpenCV的cv2.fillPoly函数填充出一个掩码,最后将这个掩码应用到原始图像上,感兴趣区域以外的部分便被屏蔽掉。整个流程简洁明了,既保证了计算效率,也满足了对特定区域重点监控的需求。
扩展功能
除了基础的图片和视频检测,这套系统还有不少可以延展的空间:
- 性能优化:可以采用模型量化等技术来压缩延迟,特别是当系统需要部署在边缘设备上时,这一步往往至关重要。
- 用户交互:增加更友好的交互方式,比如让用户直接在界面上绘制ROI区域,而不是在代码里写死坐标值,这样日常使用会灵活很多。
- 数据记录与分析:搭建一个后台系统,把每次检测的结果收集起来,如此一来,后续的数据挖掘、统计分析和趋势预测就有了基础。
- 云集成:如果条件允许,将检测服务迁移到云端,既能减轻本地硬件的压力,又能借助云端算力提升处理效率。

代码
以下是区域检测的核心代码实现——通过设置掩码来限定检测区域,并将掩码区域可视化到输出图像上:
结果对比
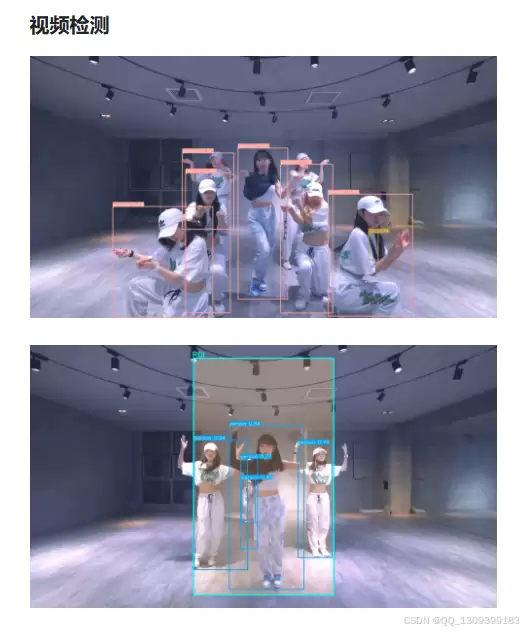
区域限制

没有区域限制

对比结果
结语
总体来看,这套基于YOLOv5的目标检测系统灵活度很高,应用场景也十分广泛。随着深度学习技术的持续演进,后续还有很大的空间去探索更先进的算法和优化策略。希望这些内容能对您完成智能制造相关的项目有所启发。如果遇到具体的技术问题,欢迎进一步交流探讨。




