基于YOLO的智能交通分析 smart-traffic
智能交通监控一直是智慧城市建设中的热门话题,近年来热度持续攀升。今天要详细拆解的这套方案——基于YOLOv12N的实时闭路电视分析系统,专注于交通违法检测、道路安全保障以及城市整体交通系统的优化。简单来说,就是借助深度学习为摄像头装上“智慧大脑”,让它自主识别路况、发现违规行为、辅助管理决策。
项目目标
大城市交通管理的痛点,相信大家深有体会:应急车道被占用、拥堵判断滞后、数据统计依赖人工。本系统旨在精准解决这些实际问题:
• 实时检测应急车道上的违规占道车辆,确保救援通道畅通无阻
• 按车道分析速度与拥堵程度,实现交通状态的“精确诊断”
• 分类统计路上行驶的各种车辆,为交通规划提供可靠的数据支撑
最终目标,是通过智慧城市管理平台的集成整合,推动交通体系向更公平、更高效的方向发展。
技术方案
核心模型采用YOLOv12N,在niverse车辆数据集上完成了250轮训练。几个关键技术亮点值得深入探讨:
Roboflow多边形工具集成
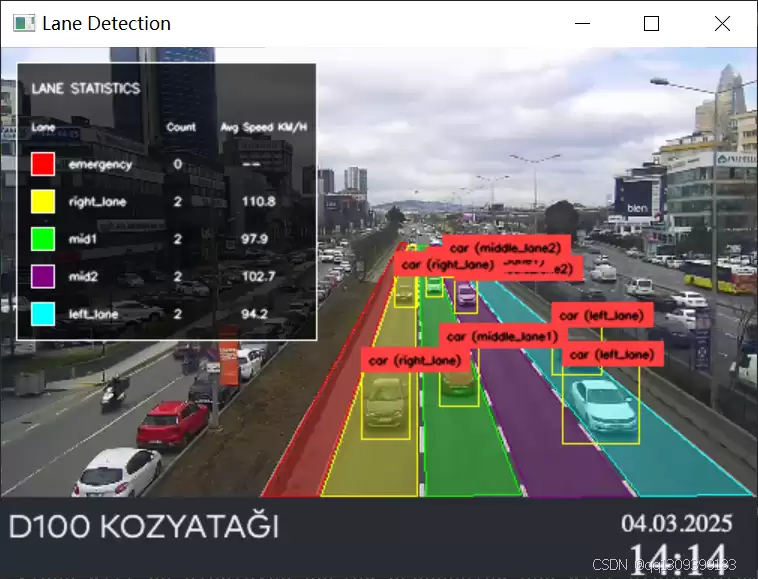
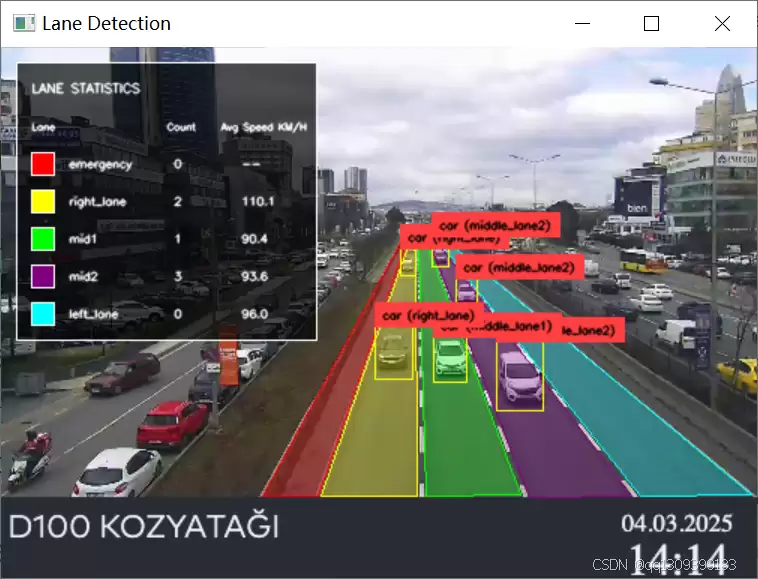
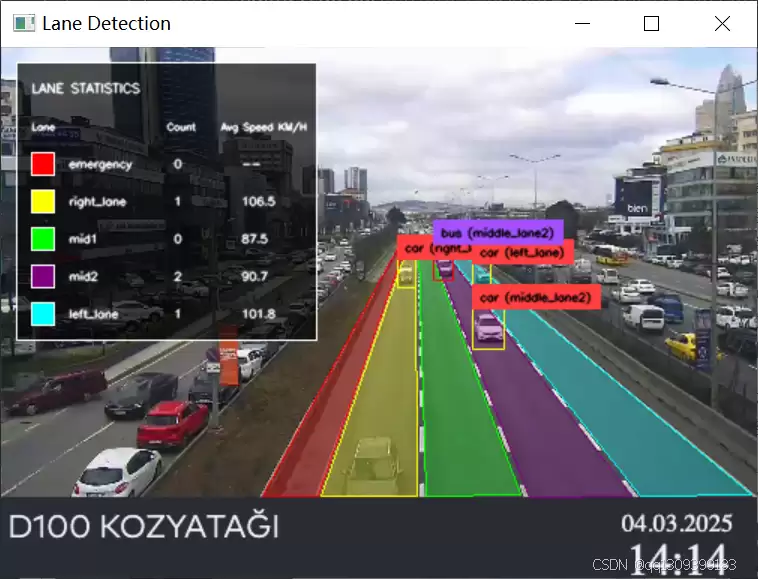
• 区域化检测:借助Polygon Tool,在监控画面中精确标出每个车道区域,如同在地图上划定范围一样精准
• 弹性分区分析:基于车道区域,实现车道级别的车辆追踪与速度测算——哪条车道拥堵、哪条车道空闲,一目了然
实时处理能力
• 闭路电视分析:本系统运行在伊斯坦布尔Kozyatagi地区的真实监控视频流上,能够实时处理,绝非实验室demo
• NVIDIA加速:模型可转换为.onnx和.engine格式,适配NVIDIA设备高效运行,大大降低了落地门槛
pip install -r requirements.txt
下载模型权重(因体积较大,未包含在仓库中)
使用说明
执行车道检测脚本,只需一条命令即可完成:
python lane_vehicle_detection.py --source_video_path 输入视频路径 --target_video_path 输出视频路径
可选参数也非常清晰:
–source_weights_path 模型权重路径
–confidence_threshold 置信度阈值(0到1)
–iou_threshold IOU阈值(0到1)
–display 实时显示处理画面
技术架构
整个系统采用模块化设计,拆分来看更加清晰:
车道检测器模块
• 多边形数据加载:从JSON文件读取预先标注的车道区域,自动适配视频分辨率
• 车道定位:通过检测框与车道区域的交集,精准判断车辆所处的车道
• 车流统计:实现车道级别的车辆计数与平均速度计算——这并非简单的车流量统计,而是精确到每一条车道
车道车辆处理器
• 多目标跟踪:将YOLO检测与ByteTrack追踪算法相结合,确保画面中每一辆车都拥有独立ID,不会丢失目标
• 检测区域分析:自动关联检测到的车辆与预定义车道区域,明确每辆车所属的区域
• 数据可视化:利用OpenCV/Supervision库,将分析数据实时叠加到画面中,直观展示结果
交通流管理系统
• 出入区域追踪:记录每辆车进出车道的完整行为,包含时间戳信息
• 速度估算:遵循“随机—现实”原则为车辆赋予速度值——并非理想化模型,而是贴近真实路况的估算方式
• 应急车道预警:一旦检测到应急车道被违规占用,立即触发告警
成果与展望
目前,该系统已经完成了完整链路验证:
✓ 基于监控视频的实时交通分析
✓ 拥堵管控优化支持(以数据为决策依据)
✓ 交通违法自动化识别(违规行为无处遁藏)
✓ 应急救援通道保障(守护应急车道,就是守护生命通道)
当然,该项目仍有较大的提升空间:
★ 模型性能:转换为.onnx/.engine格式,进一步挖掘实时性潜力
★ 数据增强:补充更多视角、更多天气场景的训练数据,增强模型的鲁棒性
★ 智能预测:引入机器学习预测交通模式,从“实时监控”升级到“提前预判”
结论
该项目再次印证了一个事实:人工智能在道路安全与交通管理领域,绝非纸上谈兵,而是能够真正落地、产生实效的技术。通过实时车辆检测与车道级别分析的深度融合,为城市交通治理提供了一套可复用的智能化解决方案。未来,这类技术创新将持续推动智慧城市向更高效、更安全的方向演进——这不仅是技术趋势,更是现实中的迫切需求。




