如果你这几年用OpenCV发布过任何产品,大概率会遇到类似的场景:库几乎覆盖了所有功能,但深度学习这块总觉得慢半拍。好不容易把模型导出成ONNX格式,用DNN模块加载进去,心里默念“给点力”,结果有时真跑通了,有时却报个从来没听过的算子错误,让人抓狂。OpenCV 5就是在这样的背景下诞生的——它不只是小修小补,而是对SDK与支持库的一次重大现代化改造。
OpenCV 5的核心目标
新版本的设计思路很明确:让核心更快更小,提升语言支持,清理过时的API,全面升级DNN引擎,融入新的硬件加速路径,强化3D视觉工具,同时让文档更加易用。一句话总结,就是把那些年欠下的技术债,一次性还清。

DNN关键解读:真正的重头戏
如果说OpenCV 5哪个部分最值得关注,DNN模块绝对排第一。过去几年,业界主流的视觉模型几乎都转向了Transformer架构,而OpenCV的DNN引擎还在跟ONNX算子覆盖率较劲。这次,他们终于把短板补上了。
ONNX算子支持
从4.x时代大约22%的算子覆盖,跃升到OpenCV 5中的80%以上。这意味着绝大多数主流模型部署都能得到良好支持,不用再为模型转换到处找补丁。
算子融合与压缩支持
DNN引擎现在能自动识别Transformer block中经典的MatMul→Softmax→MatMul模式,并将其压缩为单一的熔合注意力操作,底层采用类似FlashAttention的实现。这个改进对推理速度的提升是实打实的。
后台推理引擎支持
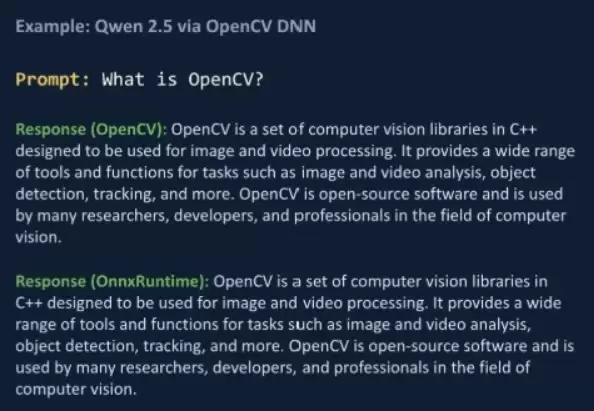
OpenCV 5提供了三种模式:DNN图模式、自动模式、ORT模式。其中AUTO模式会智能尝试最新的推理引擎,如果不行就自动回退到经典模式;ORT模式则直接采用ONNXRuntime的核心推理引擎。这种“先试后降级”的设计,兼顾了性能与兼容性。
VLM与LLM模型部署支持
这是OpenCV历史上第一次内置本地分词器,并且为自回归解码实现了KV缓存,从而让LLM和视觉语言模型的生成过程保持高效,模型一次生成一个token。此外,OpenCV 5还引入了基于CNN的特征匹配模型方式,在VLM与LLM部署上,同时支持CNN和Transformer系列的DINO模型。
语言标准升级
OpenCV 5将C++语言标准的最低要求提升到了C++17,全面抛弃了旧的C API方式。这意味着更现代化的代码风格和更严格的内存安全,当然,也意味着旧项目可能需要做一些升级适配。
硬件加速
传统的图像算法依然支持硬件加速,但OpenCV 5通过单一的指令矢量库(Universal Intrinsics 2.0)自动映射到不同CPU的指令集——SSE、A VX2/512、NEON、SVE、RVV。团队报告显示,常见的ARM操作(如调整大小和变速)速度提升了3~4倍。
3D视觉
过去几年OpenCV的3D能力一直在增强,OpenCV 5将其重新划分为三个重点模块:
- 3D基础:包括三维几何视觉、输入输出、几何原语、ICP算法以及部分SLAM内容。
- CALIB相机校准:涵盖单机校准和重构的多机位流水线。
- 立体声深度:专门用于立体视觉的深度计算。
个人观察
综合来看,OpenCV 5的革新主要集中在这几个方面:
- DNN模型支持从CNN拓展到Transformer,再到LLM与VLM
- 传统图像算法的指令集加速优化
- 3D视觉与相机校准的体系化重构
- 文档的更新与重写
尽管OpenCV团队已经宣布了5.0版本,但目前官网暂时没能找到打包好的安装包,Python的pip版本也确认会滞后发布。所以问题来了——之前用OpenCV 4的项目,现在需要马上升级到5吗?建议是:不着急,让子弹先飞一会儿。毕竟,勇敢者先掉坑,这句话在开源社区里从不过时。




