触觉,正成为具身智能的关键技术前沿
我们刚刚在奥地利维也纳,见证了一场极具影响力的学术盛会。全球机器人与自动化领域顶级会议——2026 IEEE 国际机器人与自动化大会(ICRA 2026)正式拉开帷幕。同期,第七届 ViTac Workshop(视触觉专题研讨会)也成功举办。千觉机器人(XenseRobotics)作为最高级别赞助商受邀出席,与来自世界各地的顶尖学者一道,聚焦视触觉技术前沿,深入探讨如何让具身智能真正走出实验室、迈向真实世界。

本届 Workshop 的主题为“Learning to See and Feel: Vision-Tactile Synergy for Embodied AI”,核心聚焦视触觉融合在机器人操控中的应用。随着机器人逐步向真实、非结构化环境迈进,触觉正成为其理解接触、力反馈、滑移、形变及材质等物理信息的底层核心技术。
近年来,新型触觉硬件、高保真仿真环境以及视觉-触觉-语言-动作模型的快速演进,正推动机器人触觉智能从单点感知向系统化能力跃升。围绕触觉硬件、数据采集、仿真、基础模型和富接触操作等关键议题,本次 Workshop 为学术界与产业界搭建了一个前沿交流平台。

workshop现场展示
从硬件感知到数据闭环:构建物理智能的“触觉底座”
本次会议上,千觉机器人联合创始人、CTO赵浩南围绕触觉感知与物理智能发表了主题分享,明确提出一个关键判断:机器人若要在真实世界真正落地,必须构建一套触觉驱动的物理智能体系。
 联合创始人&CTO赵浩南进行主题分享
联合创始人&CTO赵浩南进行主题分享
基于这一判断,千觉机器人系统展示了公司在高精度触觉传感、触觉仿真、触觉算法等领域的核心成果与技术布局。围绕“用触觉点亮物理智能”这一核心理念,详细阐述了自研的多模态触觉传感器、触觉仿真平台 Isaac Sim、TouchGuide 触觉引导策略等核心技术,以及在工业精密装配、柔性抓取、人机交互等场景中的探索应用。这些成果共同将触觉从单点传感器能力,升级为机器人理解接触、执行精细操作和适应复杂环境的底层通用能力。
 创始人&CEO马道林进行panel讨论
创始人&CEO马道林进行panel讨论
作为全球最早提出触觉空间智能理论的硬科技企业,千觉机器人始终专注于构建机器人触觉智能体系。其自研的多模态触觉传感器,能够精准捕捉高密度接触图像、形变信号与实时力数据,实现运动、滑移、力等多维度感知,并适配异形曲面与柔性材料,为机器人精细操作提供了坚实的“触觉神经”支撑。该技术曾荣获 ICRA 2024 全球唯一最佳会议论文奖。
在技术创新层面,依托 Isaac Sim 触觉仿真平台,能够以较低成本生成多模态交互数据;通过创新触觉标定、柔顺感知与 TouchGuide 引导策略,显著提升了机器人在穿线、装配、柔性抓取等复杂任务及精细操作“最后一公里”的可靠性。
目前,千觉已构建深度融合触觉硬件研发、高精度触觉数据采集、自研感知算法迭代、触觉世界模型构建及 VTLA 模型场景化应用的物理智能全栈闭环生态,从而实现物理智能系统的自我进化与持续领先。
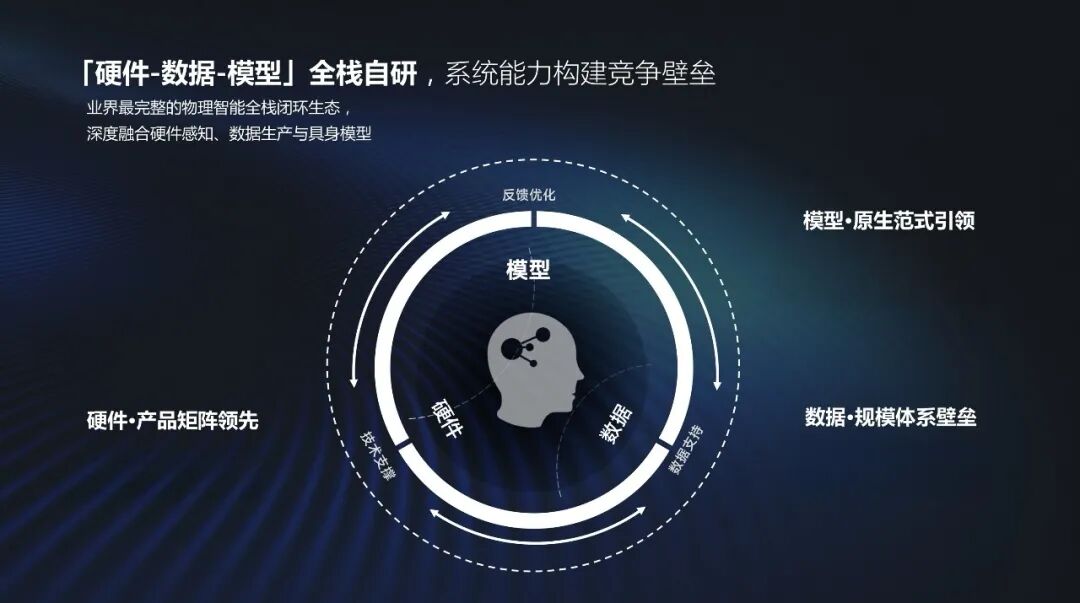 千觉物理智能闭环生态概念图
千觉物理智能闭环生态概念图
未来展望:让机器人在接触中理解并操作世界
对于具身智能而言,真实世界操作的核心挑战往往潜藏在接触之后。物体是否滑移、表面是否柔软、接触是否稳定、力度是否合适——这些信息很难仅凭视觉判断,却直接决定了机器人在抓取、装配、交接、对位、滚动接触等任务中的表现。
千觉坚信,触觉是实现物理智能的关键入口。只有当机器人能够同时“看见”并“感受”世界,它才有能力在复杂的物理交互中实时修正动作,从“执行动作”走向“理解交互”。
未来,千觉机器人将继续围绕“让触觉可规模化、可学习、可部署”的目标,聚焦触觉感知升级、数据集构建、仿真优化与模型融合四大方向,携手全球科研机构与产业伙伴,共同推动触觉智能的技术创新与规模化落地——让触觉成为下一代具身智能的通用核心能力。




