研究背景
视觉导航是自主机器人与智能移动设备的核心技术,而环境表征方式直接决定了导航的精度、鲁棒性及实际部署的难易程度。目前主流的视觉导航方案各有显著短板,始终难以在精度、效率与通用性上达到理想平衡:
经典全局度量3D地图——基于占据栅格或SLAM重建的全局一致几何地图。理论上,该方法确实能实现精准的路径规划,但其高度依赖高精度全局位姿配准与完整的3D点云重建。这不仅带来巨大的算力开销,且对环境变化十分敏感,一旦匹配误差累积,导航性能便会急剧下降甚至完全失效。
图像相对拓扑导航——以关键帧图像作为地图节点,依靠帧间视觉相似度构建拓扑边连接,几乎完全脱离了三维几何约束。其优点在于模型轻量,但功能严重受限,仅能执行简单的示教-复现任务,无法自主规划全新路径,面对未知岔路和环境变化时几乎无能为力。
物体相对语义导航——将环境抽象为柜子、墙面、桌椅等语义物体,并以这些物体作为子目标进行路径规划。尽管这种方法提升了规划的容错性,但过度的语义抽象导致了底层几何细节的丢失——墙面边界、斜坡、微小障碍物等信息被完全抹平,极易引发决策偏差、路径错误,甚至碰撞风险。
此外,现有方案普遍存在规划与控制割裂的痛点:控制器只能接收单一的粗粒度子目标,缺乏连续的局部代价梯度引导,导致无法自主修正规划路径中的微小误差,在复杂室内环境中适应性极差。基于上述背景,该论文跳出全局重建与高层抽象的固有框架,立足于像素级局部相对几何,打造了一种全新的像素级导航范式——MASt3R-Na v。
主要贡献
- 全新像素级地图表征:提出MASt3R-Na v拓扑导航流水线,构建像素-相对3D连通性地图。仅利用像素间的局部相对几何关系,无需全局坐标一致性、无需精准位姿估计、也无需额外深度传感器,大幅降低了建图与导航的应用门槛。
- 首创WayPixel代价图中间表征:设计了稠密像素级的WayPixel Costmap,作为路径规划与控制器的通用接口。该表征完整保留了墙面、坡度、遮挡物等精细几何梯度,弥补了图像级与物体级表征所丢失的关键细节。
- 定制化PixelReact学习控制器:专为WayPixel代价图设计了轨迹预测控制器,利用像素稠密代价梯度自主修正路径偏差,对规划瑕疵具有强鲁棒性,能够精准输出机器人局部鸟瞰视角下的轨迹路点。
- 全场景严苛验证:在4类高难度导航任务中全面超越GNM、ObjectReact等当前领先算法;仿真训练模型可直接部署于真实P3DX移动机器人,实现零微调的仿真到现实迁移,落地实用性极强。
研究方法
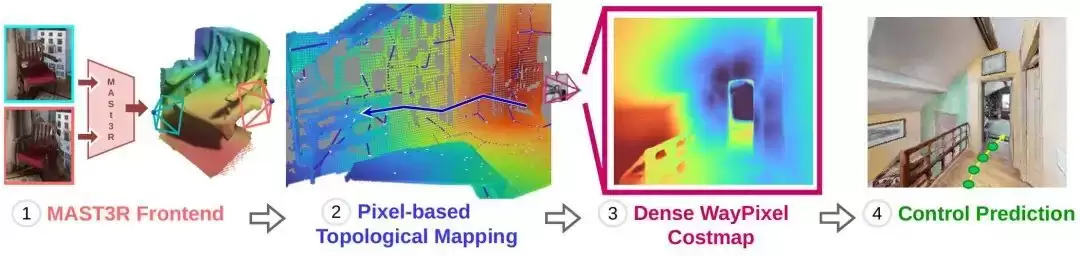
MASt3R-Na v的整体架构分为骨干模型、离线建图、在线执行、控制器训练四大核心环节,并引入了图结构精简策略,在保证几何精度的前提下严格控制计算开销。
1. 核心骨干:MASt3R 3D基础模型
全程采用冻结预训练的MASt3R作为视觉感知骨干。输入任意RGB图像对,便能输出两大核心能力:
- 跨帧稠密像素匹配关系;
- 逐像素相对3D坐标(即像素的3D位置信息)。
定义像素 p 与 q 之间的3D欧氏距离:D_{3D}(p,q) = |D(p) - D(q)|。仅依靠单目RGB图像与基础模型,就能获取可靠的相对三维几何信息,彻底摆脱了对深度硬件的依赖。
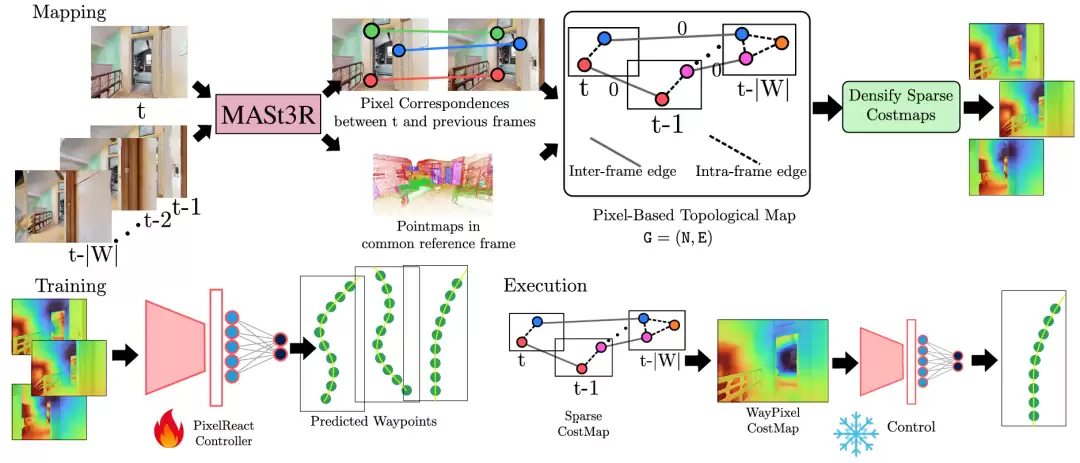
2. 离线建图:像素级拓扑地图构建
机器人遍历环境采集图像序列,构建像素拓扑图 G=(N,E):
- 节点N:只保留参与跨帧匹配的有效像素,过滤掉无几何关联的冗余像素;
- 边E:分为两类——
- 帧间边:连接不同图像中相匹配的同一物理像素,代价设为0,实现跨帧坐标关联;
- 帧内边:连接同一张图像内的有效像素,代价由3D欧氏距离决定。
为解决百万级像素图带来的计算爆炸问题,采用三重优化策略:仅保留有匹配像素、用欧氏最小生成树(EMST)替代全连接、运行时动态激活孤立像素。这一方法在保留几何完整性的同时,大幅压缩了图规模。
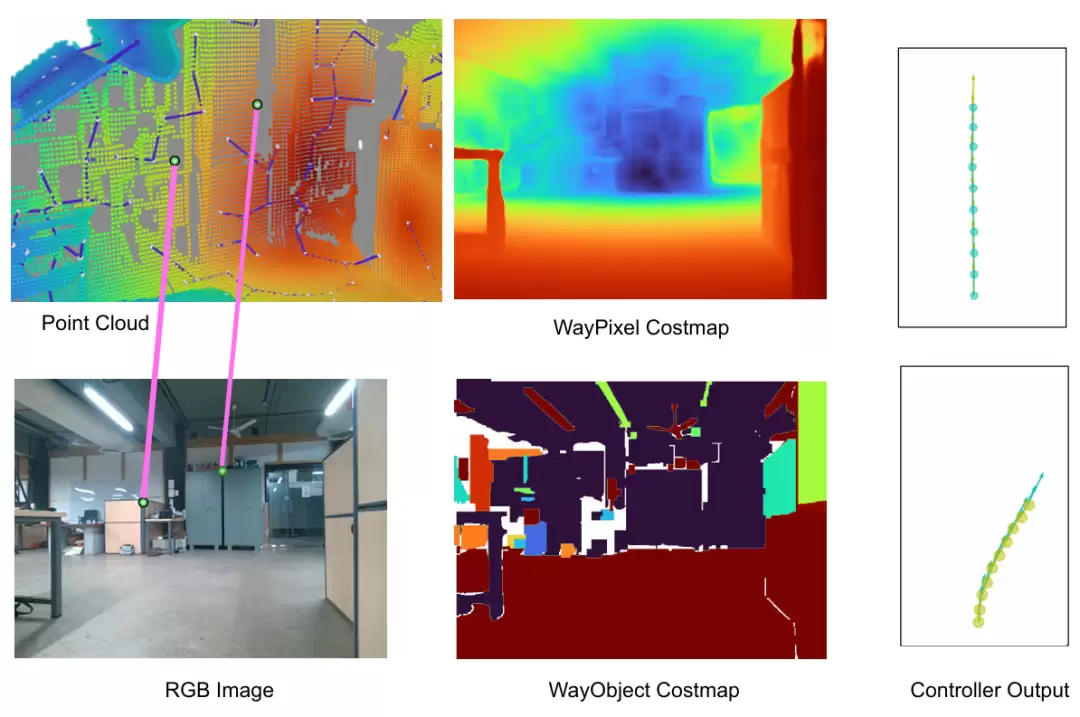
3. 在线执行:定位 + WayPixel稠密代价图生成
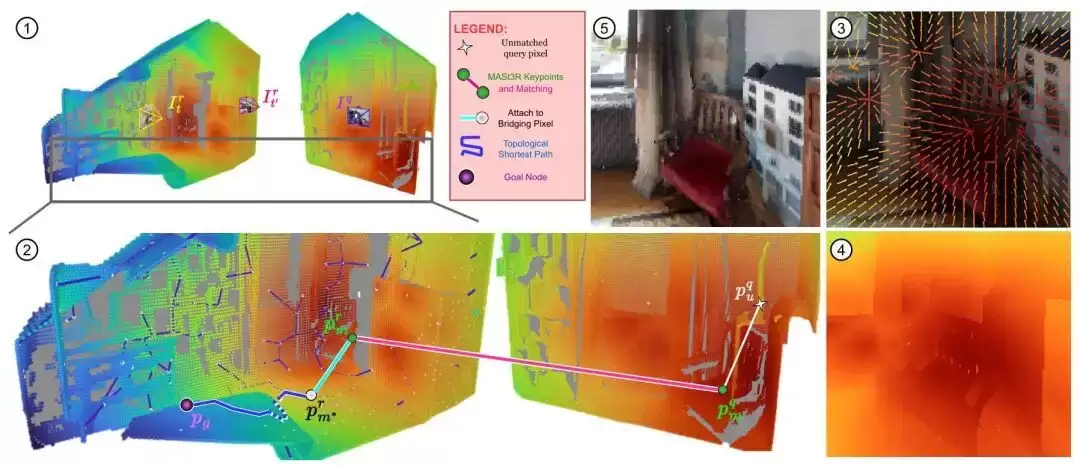
这是导航的核心环节,通过三步生成全覆盖的像素代价梯度:
- 像素级定位:将当前实时图像与历史子图进行稠密匹配,选取匹配度最高的子图完成机器人定位;
- 稀疏代价初始化:使用Dijkstra算法预计算地图中所有像素到目标的最短路径代价,实时匹配的像素直接继承地图像素的规划代价;
- 全局代价传播:将稀疏匹配像素的代价,扩散至整张图像中所有未匹配的像素,生成完整的WayPixel代价图。
公式表达:C(p_u^q, p_g) = min_{p_m^q in P_m^q} (D_{3D}(p_u^q, p_m_q) + C(p_m^q, p_g))
最终画面中每一个像素都拥有指向目标的连续代价梯度,为控制器提供了细粒度的决策依据。
4. 训练阶段:PixelReact控制器
沿用成熟的模仿学习框架,网络由卷积编码器+MLP解码器组成:
- 编码器输入WayPixel代价图,提取稠密的几何特征;
- 解码器一次性预测未来10个局部2D轨迹路点;
- 以真实的最优路径为监督,采用L2回归损失进行训练,完美拟合最优导航轨迹,能兼容各类室内布局。
实验设置
为公平对比算法性能,论文搭建了标准化、多维度的实验评测体系:
- 评测数据集:采用HM3D-IIN数据集验证集,包含36个独立室内场景,每个场景均设置独立导航任务,覆盖住宅、办公等复杂环境;
- 四大高难度导航任务:
- 轨迹模仿:复刻机器人历史遍历路径;
- 陌生目标导航:前往见过但未走过的目标,需自主规划新路线;
- 捷径规划:避开原遍历路线,自主寻找更短通行路径;
- 反向遍历:逆着历史轨迹完成导航,考验大视角匹配能力;
- 核心评估指标采用机器人导航领域的通用权威指标:SPL(路径加权成功率)与SSPL(软路径加权成功率),兼顾任务完成度与路径效率;
- 成功判定标准:机器人在300步内抵达目标1米范围内,即判定导航成功;
- 软硬件部署:仿真基于Habitat平台;真实硬件采用P3DX移动机器人搭配RealSense RGB相机;算法评测服务器配置为AMD Ryzen 9 7950X + RTX A4000 16GB。
实验结果
1. 表征维度消融对比
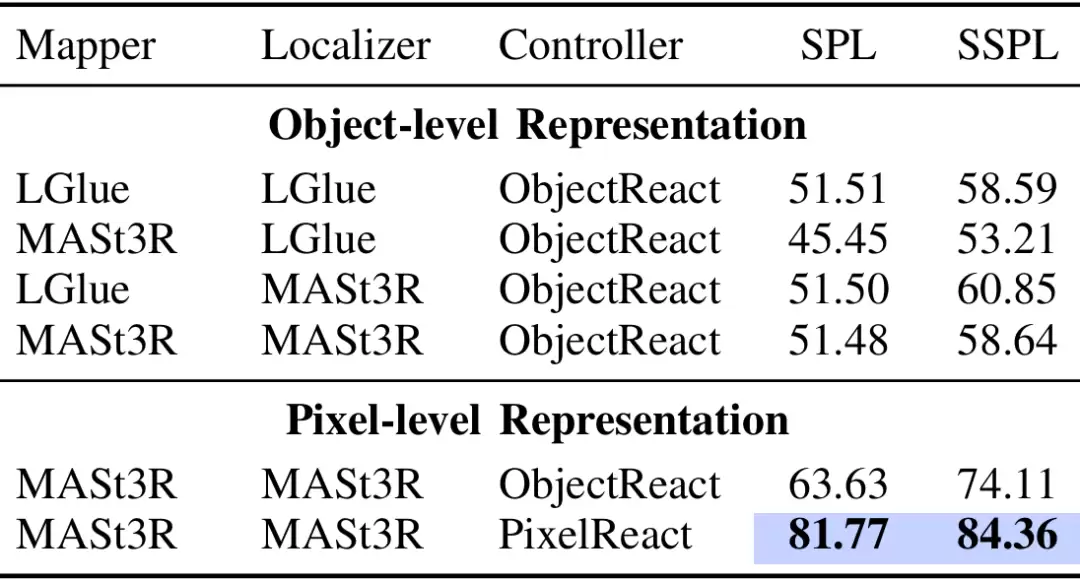
单纯更换图像匹配器,无法提升物体级导航的性能上限;而像素级WayPixel表征与PixelReact控制器的组合,使得SPL从传统物体级的51.51%大幅提升至81.77%,这充分证明像素细粒度几何表征才是突破性能瓶颈的关键。
2. 与当前领先算法全方位对比
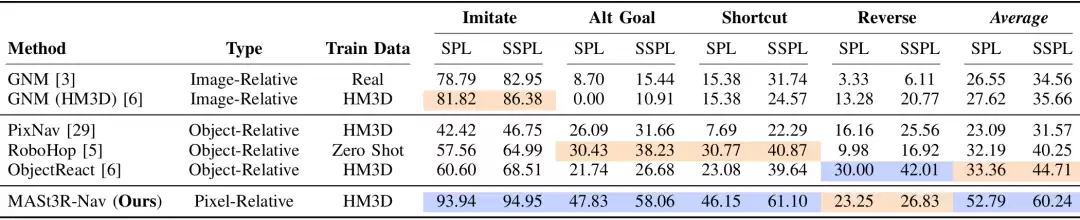
MASt3R-Na v在轨迹模仿、陌生目标、捷径规划三大任务上展现出显著优势:
- 模仿任务SPL高达93.94%,超过此前最优模型10个百分点;
- 陌生目标与捷径任务的性能较物体级基线近乎翻倍;
- 仅在反向遍历任务中,因大视角匹配歧义而性能略低,四项任务平均SPL为52.79%,综合实力断层领先。
3. 图结构效率权衡
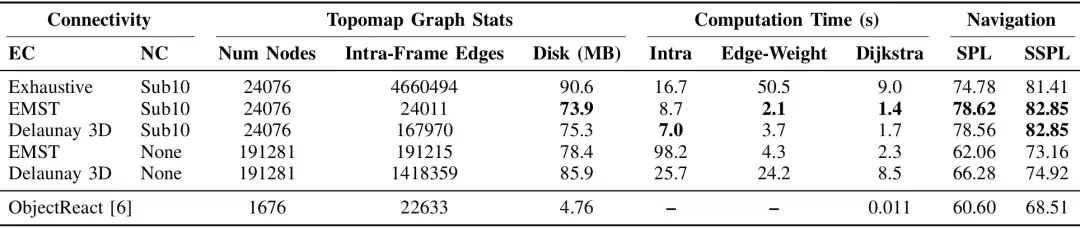
采用EMST精简策略后,帧内边数从466万骤减至2.4万,Dijkstra规划耗时从9.0秒压缩至1.4秒。算力大幅下降的同时,导航性能未受任何影响;冗余的全像素匹配反而会引入噪声、降低成功率,这充分验证了稀疏像素几何表征的有效性。
4. 大规模环境可扩展性
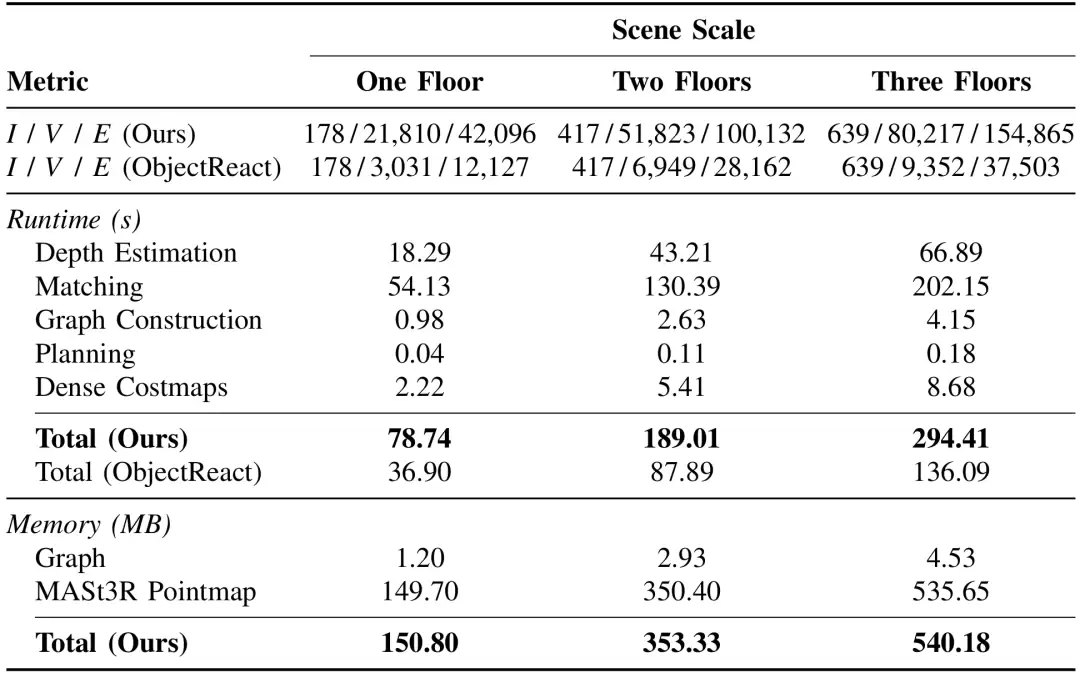
当环境从1层扩展至3层大型办公楼宇时,算法的运行耗时与内存占用均呈线性增长;即便面对拥有8万像素节点的超大地图,总运行时长也不足5分钟,存储空间仅需540.18MB,完全能够支持大型园区或楼宇的规模化部署。
5. 真实机器人落地实测
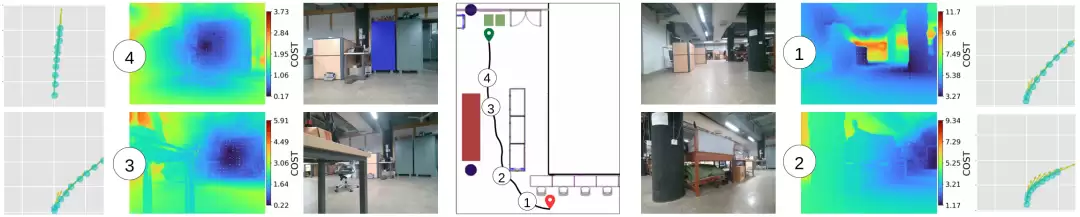
仅在仿真HM3D数据集上训练的模型,无需任何微调,便可直接部署于真实未知的室内环境。机器人能够凭借WayPixel代价图精准感知障碍物并预判通行方向,平稳规划轨迹抵达目标,展现出极强的仿真到现实迁移能力。
总结与未来工作
研究核心总结
MASt3R-Na v的问世,彻底打破了机器人视觉导航的固有设计思路:
- 摒弃全局3D重建与繁琐的位姿标定,依托像素相对3D连通性实现轻量化建图;
- WayPixel代价图锁定了精细几何细节,解决了物体级表征因抽象过度而导致的决策失误痛点;
- PixelReact控制器利用稠密代价梯度容错规划误差,使导航更加稳定与智能;
- 兼顾精度、算力、可扩展性与落地性,在仿真与真实机器人双场景中全面验证了其核心价值。
未来研究方向
- 探索像素几何与物体语义的混合表征,融合两者优势,补齐反向轨迹导航的短板;
- 优化MASt3R在大视角下的图像匹配策略,提升极端视角与低重叠场景下的定位与规划精度;
- 进一步轻量化模型与图结构,使其能够适配小型无人机、家用服务机器人等低算力终端设备。




