ICRA 2026今日在维也纳盛大开幕。超过8000名学者齐聚一堂,仅开幕首日就释放出三个不容忽视的行业信号:首先,那款大鼠后肢外骨骼凭借836个赞,刷新了整个采集周期的互动记录,意外成为全场最受瞩目的焦点;其次,RL4IL Workshop甫一开幕便引发了关于技术路线的激烈辩论,Jason Ma力挺的RL策略与BC阵营之间的分歧迅速白热化;最后,28篇论文集中亮相,涵盖触觉感知、VLA操控、SLAM及透明物体感知等多个领域,机器人的操控能力正迎来全方位的突破。以下三大热门议题,基本涵盖了开幕日所有值得深入探讨的内容。
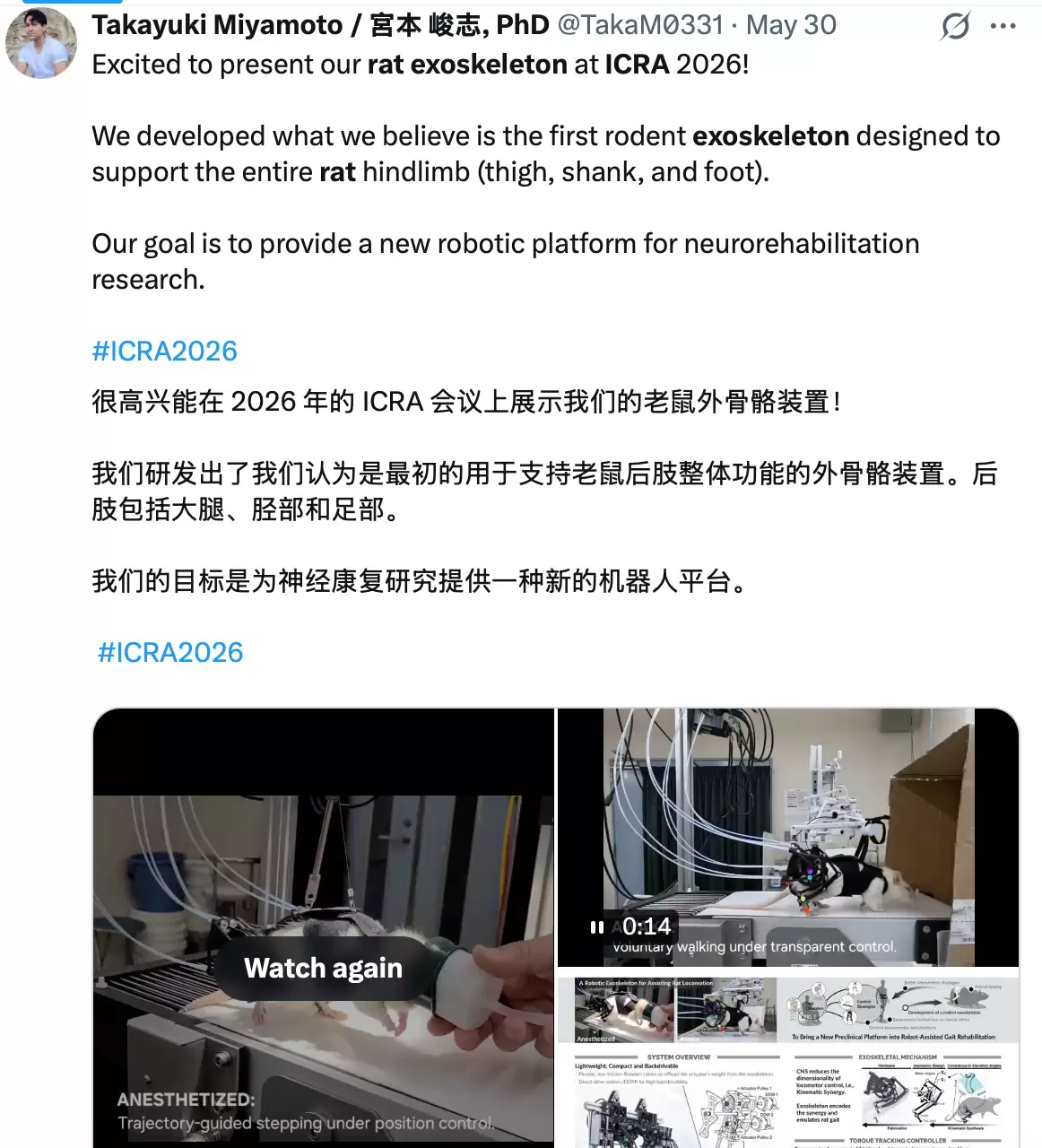
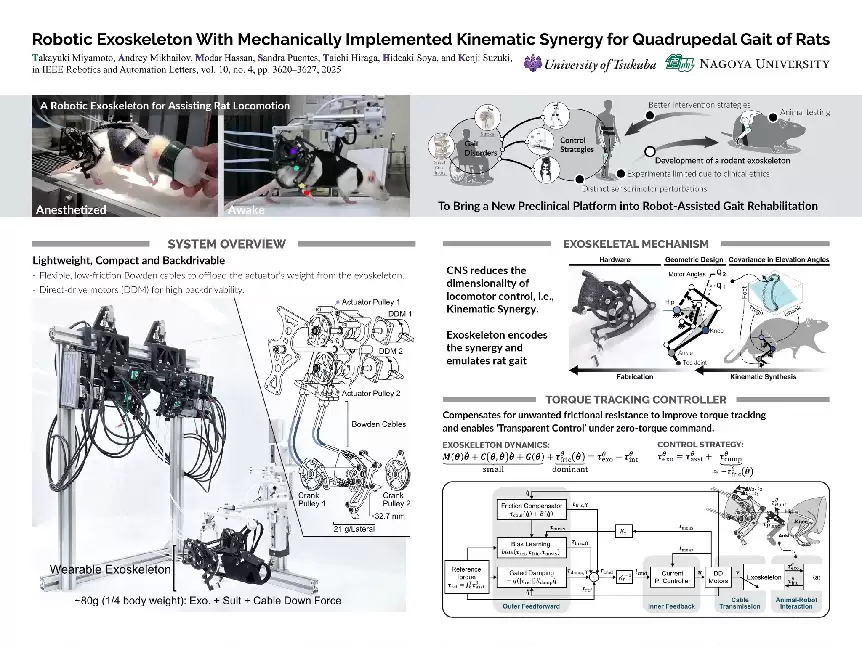
神经康复新突破:大鼠外骨骼出圈,触觉感知浪潮来袭
机器人若想真正掌握“动手”能力,首先需要具备“触觉”感知。ICRA 2026开幕首日,一篇关于大鼠后肢外骨骼的论文意外成为全场话题之王。这不仅是一次动物实验的噱头——其背后蕴含着神经康复机器人的全新可能性。与此同时,触觉传感器领域的成果也在同日集中爆发:EIT气动混合触觉皮肤、磁学+3D打印超分辨率触觉皮肤,以及触觉与本体感觉的融合估计——四篇论文在同一天亮相,共同释放出一个强烈信号:机器人“感知自身”的能力,正在经历一场质的飞跃。
VLA与机器人学习:“RL还是BC”的路线之争开幕白热化
让机器人从视频和语言中“自学”操作技能,已成为机器人学习领域最前沿的战场。ICRA 2026开幕首日,RL4IL Workshop一开场便引发了学界关于技术路线的激烈争论。Jason Ma的态度十分明确:RL才是提升现实世界策略性能的关键。而与此同时,AINA、RUKA-v2、HAND、Robometer等一系列成果,充分展示了行为克隆方向的深厚积累与突破。此外,FDP快速扩散策略荣获Oral荣誉,SlotVLA则通过对象关系表示重新定义了VLA操控的边界——操控智能的竞赛,正在ICRA 2026现场加速上演。

从透明物体到全身控制:机器人感知与运动的边界被同时推进
能够准确识别透明物体(如玻璃杯),同时协调手脚完成复杂任务——这两件事看似平常,却是机器人走进真实世界必须跨越的两道硬门槛。本次大会中,ClearDepth首次实现了双目相机对透明物体的精准深度感知,ScaleMaster则直击单目SLAM长期存在的尺度漂移痛点。与此同时,安全全身操控领域的论文展示了如何在行走过程中稳定操作物体,而COBALT云端遥操作平台更将数据采集门槛降至仅需一部智能手机即可完成。四篇论文,从感知到执行,共同勾勒出机器人“完整能力”的最新轮廓。




