喜讯:我们的论文被 ICRA 2026 接收!论文编号为 Paper TuI1I.294。本研究致力于解决一个极具现实意义的问题——在狭窄、杂乱且视线受阻的环境中,机器人如何实现“边观察边移动”,而非盲目抓取?
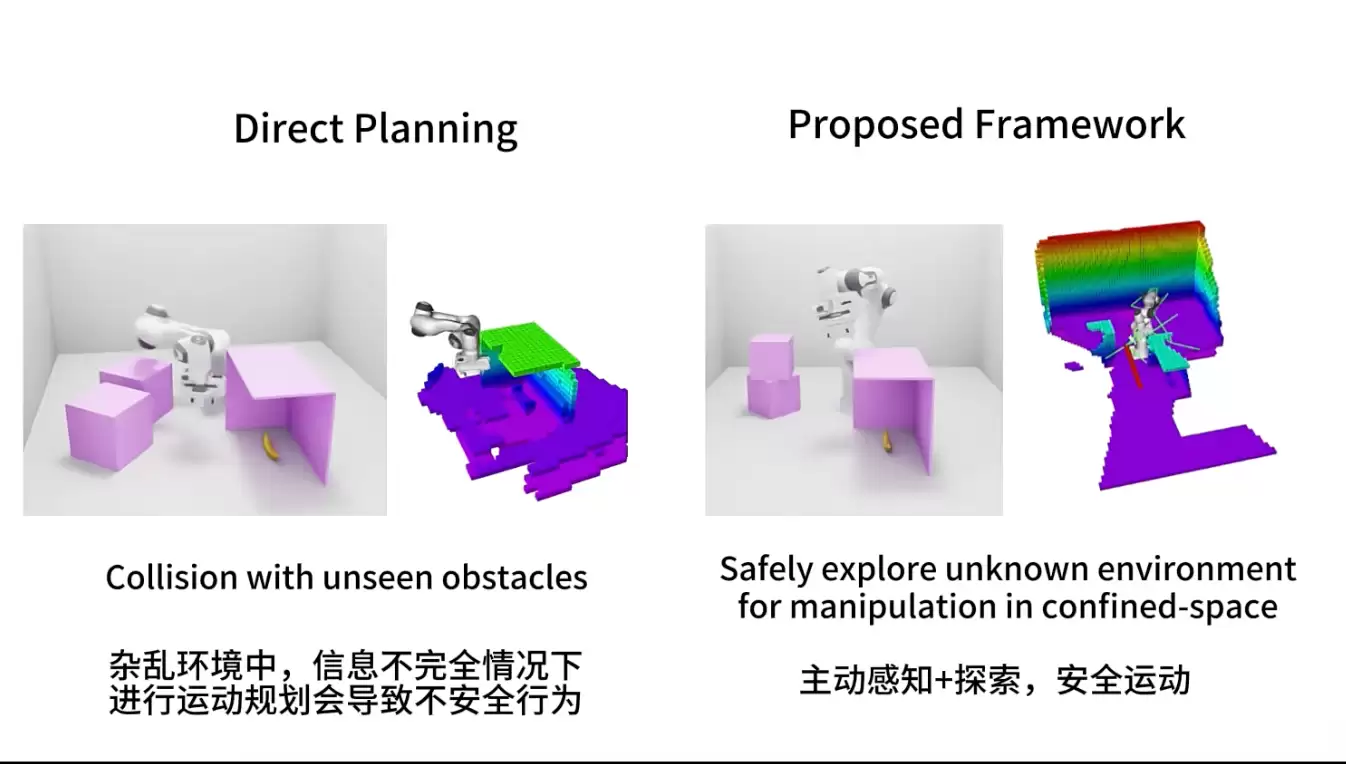
在实际应用中,机器人往往无法预先获得完整的环境地图。例如,目标物体可能被障碍物遮挡,机械臂周围存在箱子、墙壁、柜子等限制。机器人既无法清晰辨认目标,又不能随意移动——稍有不慎便会与环境发生碰撞,或处于无法抓取的姿态。
因此,狭窄空间操作的核心挑战不仅在于“如何抓取”,更在于:机器人必须首先安全地探索环境,定位目标,然后生成实际可执行的抓取策略。
为此,我们提出了一套名为 COMPASS 的框架,专为狭窄空间中的主动感知与操作规划而设计。该框架包含三个关键步骤:
第一步,机器人执行近场感知扫描(Near-Field Awareness Scan),利用腕部相机谨慎探测自身周围空间,首先明确“哪些区域不可触碰”。
第二步,机器人采用操作效用探索RRT(Manipulation-Utility Exploration RRT)主动选取下一个观察视角。关键在于:它不仅权衡信息增益,还会综合评估机械臂的运动灵活性、姿态是否接近奇异点、路径平滑性以及后续抓取可行性。
第三步,一旦目标被识别,系统将生成同时满足障碍物规避与运动学约束的抓取姿态,而非仅选择几何上可行但实际不可达的抓取方案。
此外,我们构建了一个狭窄空间操作基准测试(benchmark),涵盖从简单遮挡、严重遮挡,到强运动学约束,乃至两者耦合的复杂场景,系统性地评估机器人在“视线受阻”与“运动受限”并存时的表现。
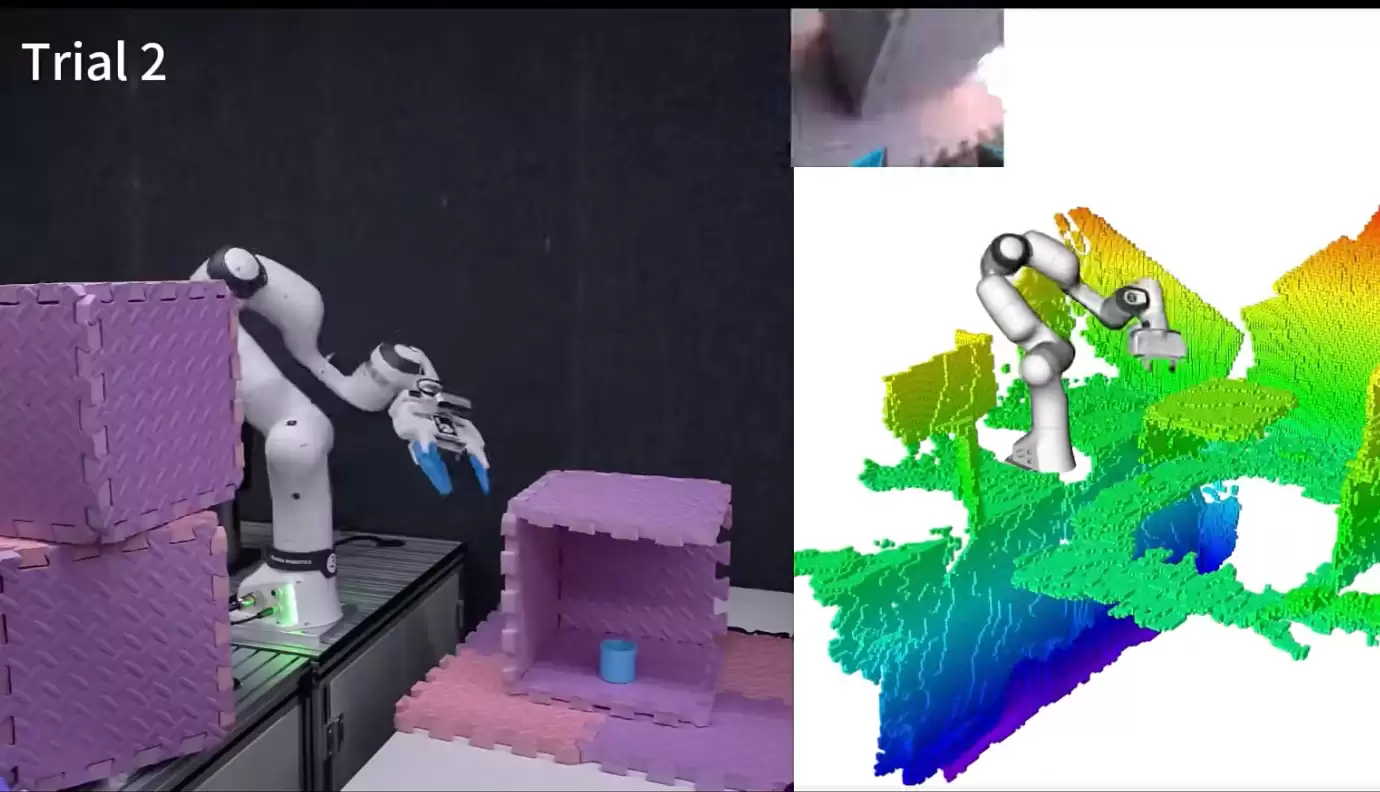
实验结果表明,与仅考虑信息增益或传统探索策略的方法相比,COMPASS 在仿真环境中显著提高了整体操作成功率;在真实机器人实验中,它同样能够在未知、遮挡、狭窄的环境中主动探索、定位目标,并成功完成约束条件下的抓取。
未来,我们将持续深入研究主动感知、狭窄空间操作、机器人运动规划以及具身智能系统设计等方向。




