
虽然各类模型、数据集和仿真器已在代码仓库中经历了多次迭代,但在实际应用层面,能够供研究人员自由使用的机器人硬件设备仍然极为稀缺、价格高昂且结构脆弱。一套完整的制造方案起步价动辄数十万美元,更不必说那些封闭的生态系统、易损的关节部件,以及出现故障后令人束手无策的维修困境。
坦率地说,这种现状已经严重制约了整个机器人领域的发展步伐。令人振奋的是,今年5月下旬,Hugging Face 正式发布了开源项目 LeRobot Humanoid,精准地切中了这一行业痛点。这款能够自主站立、迈步行走的双足人形机器人,其整体硬件成本竟然不到3,000美元。具体而言,其“骨架”部分仅需约3.5公斤的3D打印塑料耗材,成本低至56美元。而真正赋予它运动能力的12个关节电机,则全部来自中国成熟的硬件供应链。
换言之,这款机器人的价格被直接“降压”到了一个令人难以置信的水平。更关键的是,它远不止是节省了成本——它提供了一套完整的、将机械设计、仿真模拟、系统标定、策略训练直至实体部署全部无缝打通、实现全栈可复现的“机器人学习闭环”。这才是推动该技术走向普及的核心一步。
一个刻意不追求“最先进”的项目
LeRobot Humanoid 由项目主创维吉尔·巴托(Virgile Batto)发起,并联合了Hugging Face 的众多贡献者共同完成。它的项目定位从一开始就十分明确:如果研究人员追求的是“最先进的人形机器人”,那么这个项目或许并非最佳选择;其核心目标,是向所有人提供一台能够亲手搭建、深度理解、自主维修、灵活改装、仿真训练并最终完成控制的机器人。
最新博客指出,人形机器人正逐步成为机器人学习领域至关重要的研究对象,但相应的硬件设备往往价格不菲、系统封闭、容易损坏或难以复制重现。即便模型、数据集、仿真器和训练代码均已开源,用于生成实际数据和验证算法的物理平台,依然是制约研究的稀缺资源。许多人能够在仿真环境中训练策略,但真正能够在实体人形机器人上贯通整个“闭环”流程的,仍仅限于少数顶尖实验室。
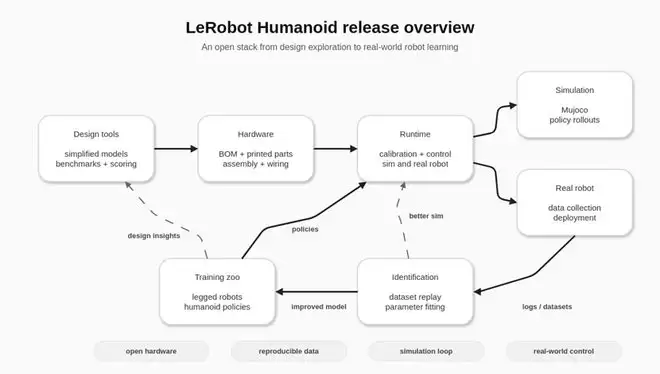
正是这种现实困境,赋予了此次发布非同寻常的意义。该项目的核心是一套由五大组件构成的全栈平台,完整覆盖了“教会机器人行走”的整个链路:从设计、搭建、仿真,到数据采集、模型辨识、策略训练,再到最终部署回实体机器人。
(来源:LeRobot Humanoid)
这五大组件分别是:硬件、设计工具、运行时(Runtime)、参数辨识与训练环境集合。其中,硬件部分涵盖了详细的物料清单(BOM)、可打印零件、装配与接线文档以及电机调试工具;设计工具是一套基于简化机器人模型的控制导向设计流程与基准评测体系;运行时(Runtime)能够在仿真环境与真实机器上对机器人进行标定与控制,内置安全检查机制,并与LeRobot的数据采集功能深度集成;参数辨识模块通过对真实运行数据的回放与拟合,优化仿真参数,从而缩小“仿真与现实”之间的差距;训练环境集合则主要用于在MJLab中训练和评估腿式机器人的运动控制策略。
硬件:从一张物料清单读出成本真相
通过项目硬件仓库公开的物料清单(BOM),我们可以将这台机器人的成本构成“拆解”得一清二楚。目前发布的平台为纯双足结构,未配备上半身,共拥有12个自由度。主控采用一块树莓派5(Raspberry Pi 5);姿态感知依赖BNO055或BNO085惯性测量单元(IMU);电机与主控之间通过CAN-FD总线进行通信(搭配一只SA VVYCANFD双通道适配器)。整台机器人需要3D打印75个零件,按照子装配体分布于躯干及左右双腿;打印耗材约为3.5至4公斤的PLA+塑料丝。

(来源:LeRobot Humanoid)
全部十二个电机均来自中国厂商灵足时代(RobStride),按安装部位具体分布为:躯干O0两只、髋部O2两只、大腿O3四只、小腿O5四只。
从成本明细来看,树莓派5与总线适配器等主控电子设备合计约需235美元,3D打印耗材的塑料丝成本约56美元,而螺丝、轴承、电缆、电源等标准件合计约465美元。剩余最为昂贵的部分,正是这12只来自中国灵足时代的电机,总价为1,880美元。据此计算,整机总成本仅为2,636美元。
可以说,来自中国的硬件供应链搭配桌面级3D打印技术,构成了这台开源人形机器人实现成本大幅下降的缺一不可的关键要素:3D打印使得占据机器人体积绝大部分的结构件成本显著降低,而真正昂贵且难以自制的执行器(电机),则因中国供应链的存在而被压缩到了可承受的范围内。
软件:低算力下的高频闭环
在软件方面,运行时仓库公开的文档表明,整套Runtime系统运行在单板电脑树莓派5与Ubuntu系统之上,使用Python对12个电机进行高频闭环控制。对于许多机器人工程师而言,这听起来或许有些不可思议。传统观点认为,双足机器人的平衡控制算法通常要求极高的计算频率(通常在500Hz到1,000Hz之间),并且需要运行在配备实时操作系统(RTOS)的强大x86主机上。
然而,这台机器人在技术路径上做出了一些务实的折中与取舍。首先,它的控制协议被极大简化,与电机的通信采用基于CAN-FD总线的MIT控制协议,该协议仅传输基本的扭矩、位置、速度和刚度参数,数据载荷极小。
其次,项目避开了复杂的传统控制算法,倾向于在PC或服务器端基于MuJoCo仿真环境训练轻量化的端到端神经网络步态模型,例如采用PPO等强化学习算法,并将其导出为ONNX或PyTorch格式,再部署到树莓派上执行。
此外,鉴于Python语言本身存在垃圾回收机制与多线程性能限制,为了确保实时性的稳定,开发团队在底层编写了一整套严格的标定与安全检查机制,包括指令跳变防护、踝部保护与急停等前置安全措施,从而在神经网络输出不稳定时,有效防止3D打印的关节因冲击而损坏。
如果仔细查看项目博客的作者列表,你会发现,作为高性能机器人中间件dora-rs的开发者,陶海轩(Haixuan Xavier Tao)的名字赫然在列。然而,首个正式发布的运行时版本,却并未默认运行在dora-rs之上。
(来源:LeRobot Humanoid)
其原因并非出于兼容性问题。作为一个开源项目,在维护生态时,LeRobot的最新核心库必须保持“纯Python(Vanilla Python)”形态,这样才能确保即使是刚入门的AI开发者,也能毫无障碍地读懂每一行代码。对于真正追求极致控制性能的用户,dora-rs社区早已通过dora-lerobot提供了完整的高性能加速替代方案。
Hugging Face 的数据飞轮与生态野心
从硬件谱系来看,LeRobot于2024年由前特斯拉科学家雷米·卡德内(Rémi Cadène)在Hugging Face内部创立。2024年10月,LeRobot与法国公司The Robot Studio合作推出了SO-100机械臂:一只售价约100美元、可3D打印的机器人手臂,被誉为当时入门门槛最低的DIY机器人之一;2025年,该产品升级为配备相机、电机运行更顺滑的SO-101,售价区间在100至500美元。如今,LeRobot Humanoid将这条发展路径从机械臂延伸到了双足,乃至完整的人形形态。
这条从一只百元级别的机械臂,到一台数千元级别的双足人形机器人的“阶梯式”产品线,构成了Hugging Face机器人战略的核心叙事主线:通过尽可能低的入门门槛,引导AI社区一步步深入机器人领域。
Hugging Face正在运用当年推动大语言模型(LLM)开源的逻辑,来重塑机器人行业。在软件层面,LeRobot将数据采集、数据集存储、策略训练和硬件部署整合进同一套框架,大幅降低了技术共享的门槛。要理解这一点,就必须认识到,Hugging Face在AI领域的统治地位,正是源自其庞大的开源模型与数据集生态系统。如果能够将同样的模式复制到机器人领域——通过价格低廉、易于制造、操作简便的硬件(依托3D打印技术与中国电机供应链)吸引尽可能多的开发者,让他们在物理世界中采集数据,再将数据回传并贡献给开源社区——那么,数据和模型的雪球就会在Hugging Face的平台上越滚越大。
这种生态野心也体现在其资本运作与合作伙伴的动作上。2025年4月,Hugging Face收购了法国机器人公司Pollen Robotics,获得了其人形平台Reachy 2及其开源基因,并与英伟达(NVIDIA)开展了紧密合作。英伟达甚至将面向人形机器人的开源基础模型GR00T发布到了Hugging Face Hub上。Hugging Face的联合创始人托马斯·沃尔夫(Thomas Wolf)曾公开表示,公司深信,机器人是AI的下一个前沿领域,而这个前沿“应当是开放、可负担且私密的”。
当硬件彻底商品化,具身智能的商业壁垒落在哪里?
将这台LeRobot Humanoid拆解分析到最后,一个非常现实的问题便摆在了桌面上:当机器人的物理骨架可以借助家中的3D打印机制造,当最为昂贵的电机可以从中国供应链直接低成本跨境采购,当控制它行走的整个软硬件闭环都已实现全栈开源——那么,人形机器人的“壁垒”究竟还剩下什么?
答案或许已经呼之欲出。随着硬件门槛和通信中间件的全面平民化,机器人的核心价值正在发生根本性的转移。未来的竞争,将不再属于那些仅仅能够组装出一具精美物理躯壳的公司。只有那些能够低成本获取海量物理世界数据、并拥有高泛化性大脑模型(VLA)的生态构建者,才足以在具身智能的激烈竞争中占据优势。




