ICRA 2026开幕已进入最后3天倒计时,学术圈与产业界的竞争氛围愈发浓厚。今天聚焦的几大热门议题,覆盖机器人路径规划、人形机器人硬件以及自动驾驶三大方向,每一项都值得深入剖析。
多智能体路径规划取得新进展
在仓储物流、自动化工厂以及灾难救援等实际场景中,如何让数百台机器人在同一空间内高效协同移动,始终是机器人领域的“终极挑战”之一。本期两篇论文从不同角度向这一难题发起进攻——一篇借助扩散模型实现高质量轨迹规划,另一篇则在极高密度场景下刷新了多智能体协同的工程上限。
第一篇论文提出了一种基于扩散模型的多智能体运动规划新方法。其核心思路是将“总代价和”优化目标与动态引导机制相结合,在确保全局最优性的同时,显著提升了多机器人轨迹规划的质量与效率。特别是在高密度、强耦合的场景中,该方法展现出优越性能,为大规模多智能体协同开辟了一条全新的技术路径。
另一篇则来自Toyota CRDL团队,在ICRA 2026上进行展示。他们聚焦于真实工业环境中的痛点:机器人数量众多、走廊狭窄、碰撞约束复杂。针对这些难题,团队设计了一套创新求解框架,大幅提升了密集场景下的规划成功率和运行效率。该论文凭借111点赞和13.8K浏览量,荣登近10期最高互动论文帖榜首——这一热度充分说明,行业对落地场景中的痛点研究有着极高的关注度。
High Torque Robotics Mini Pi 人形机器人全球首发

硬件方面,High Torque Robotics在ICRA 2026上全球首发了Mini Pi人形机器人。这款产品以高扭矩关节驱动技术为核心,在小型化平台上实现了高力矩输出与灵活操控的兼顾。发布后即获得38点赞与1.3K浏览量的即时关注,成为本期日报硬件领域最大亮点。该产品将在展台034正式亮相,为人形机器人赛道引入了一位实力强劲的新竞争者。
Waabi 4篇 ICRA 2026 自动驾驶论文
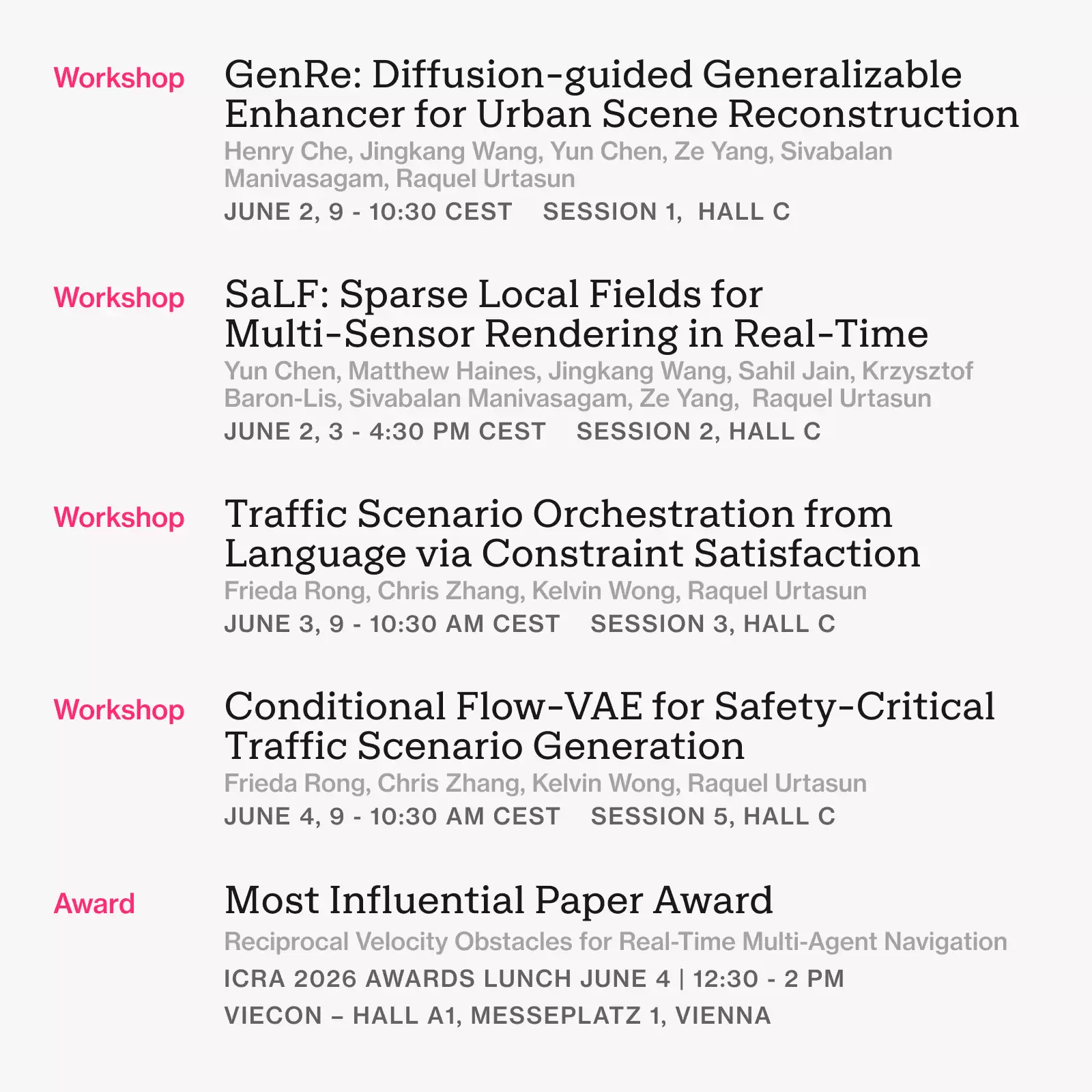
加拿大自动驾驶独角兽Waabi此次来势汹汹,一次性带来4篇ICRA 2026论文。内容覆盖感知、预测、规划及端到端自动驾驶全链路核心技术,展现了其在学术研究与产业落地之间的深厚积累。具体论文详情将在ICRA 2026会议期间正式公布——届时现场展示的实机,应该更能说明问题。




