消化道疾病的精准诊断,一直依赖于组织病理学这个“金标准”。传统的无线胶囊内镜虽然实现了无创可视化,但始终面临一个核心瓶颈:只能看,不能取。这意味着即便发现了可疑病灶,患者仍需接受侵入性的内镜活检,过程往往伴随着不适与风险。
最近,机器人领域顶级会议ICRA 2026传来消息,香港中文大学任洪亮教授团队的一项研究,有望打破这一僵局。他们提出的“仿生剪纸胶囊机器人”(Kiri-Capsule),巧妙地将古老的剪纸艺术(Kirigami)与现代机器人技术结合,设计出一种能自主完成胃与小肠浅层组织活检的微型胶囊。这为真正实现“吞服即检查”的无创活检,迈出了关键一步。
核心思路:可控穿刺与旋转刮取
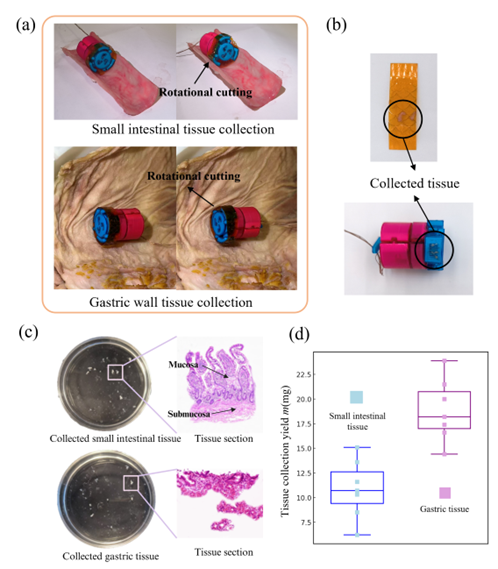
Kiri-Capsule的设计哲学非常清晰:在确保安全的前提下,于胶囊尺度内实现可控的组织采样。其工作流程可以概括为四个步骤:患者吞服胶囊进入消化道;到达目标区域后,内部驱动机构启动,使胶囊表面的特殊“剪纸”皮肤伸展出微型尖刺,浅层刺入组织;随后,尖刺阵列旋转,刮取少量组织样本;最后,样本被回收入胶囊内部的密封腔体,随胶囊排出体外后供病理分析。
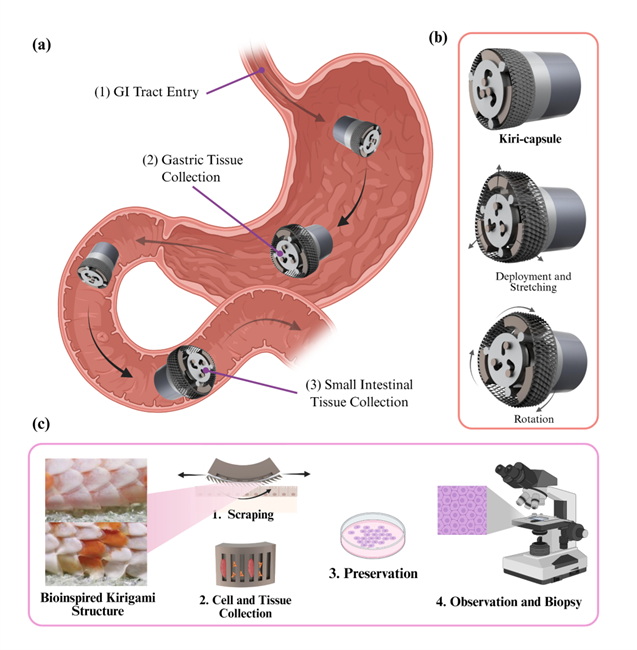
图1:Kiri-Capsule系统总览与工作流程示意。
精巧的驱动与执行机构
如何在一个直径仅约17毫米、长度约22毫米的胶囊内,实现如此复杂的“刺入-刮取-回收”动作?研究团队的核心创新在于一套高度集成的双凸轮驱动机构。
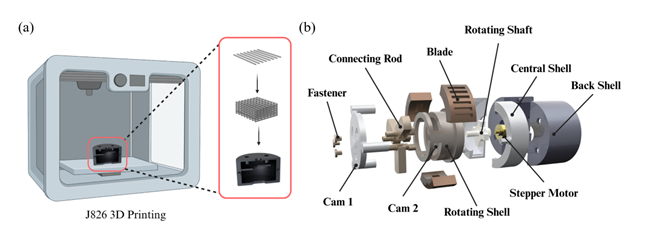
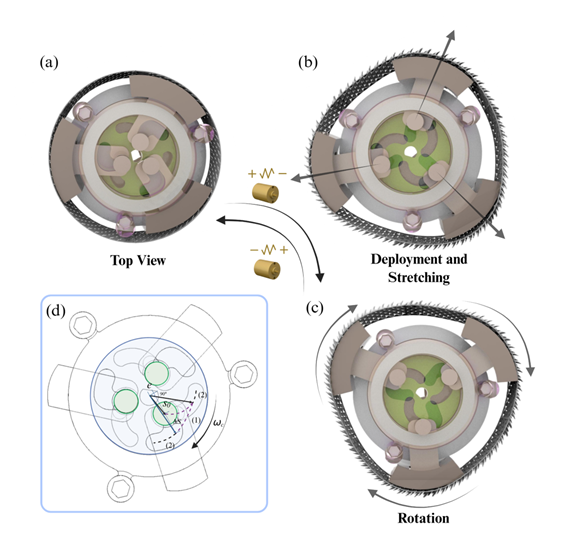
如图2和图3所示,这套机构通过一个电机的正反转,分两个阶段精确控制前端的扩张板。第一阶段,凸轮推动扩张板向外平移,拉伸包裹在其外的Kirigami薄膜,使其预设的切割图案展开,形成一系列微小的尖刺。第二阶段,当扩张板进入凸轮的曲线槽段后,开始带动尖刺阵列旋转,从而在紧贴组织表面的状态下,完成刮取动作。整个过程可逆,动作完成后可复位,确保了操作的可靠性与重复性。
仿生皮肤:剪纸艺术的力学智慧
胶囊的“皮肤”是这项技术的另一大亮点。研究团队受生物鳞片或刺状结构的启发,在聚酰亚胺(PI)薄膜上激光切割出精密的三角晶格切缝图案。这种图案经过精心设计,权衡了切缝间距、缺口长度和开口角度,使得薄膜在特定方向被拉伸时,会定向地凸起形成尖锐结构。
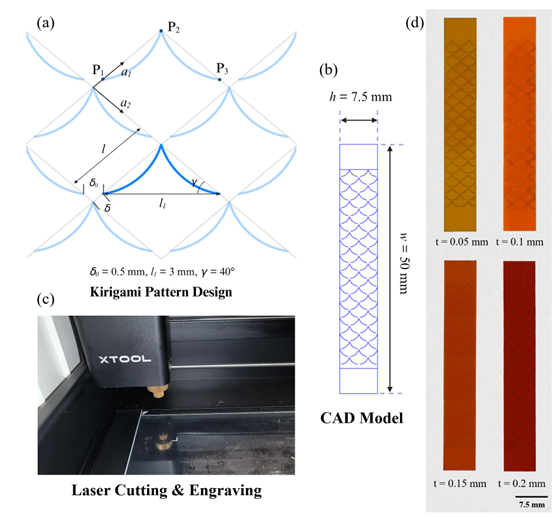
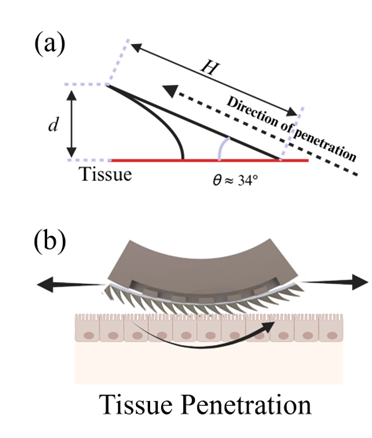
团队测试了不同厚度(0.05至0.2毫米)的PI薄膜。力学表征显示,较薄的薄膜(如0.05毫米)在拉伸时所需的驱动力更小,更适用于胶囊内有限的空间和能源,因此被选为最终方案。当薄膜被拉伸15%的应变时,这些尖刺的折展角度可达约34°,足以实现有效的组织接触。
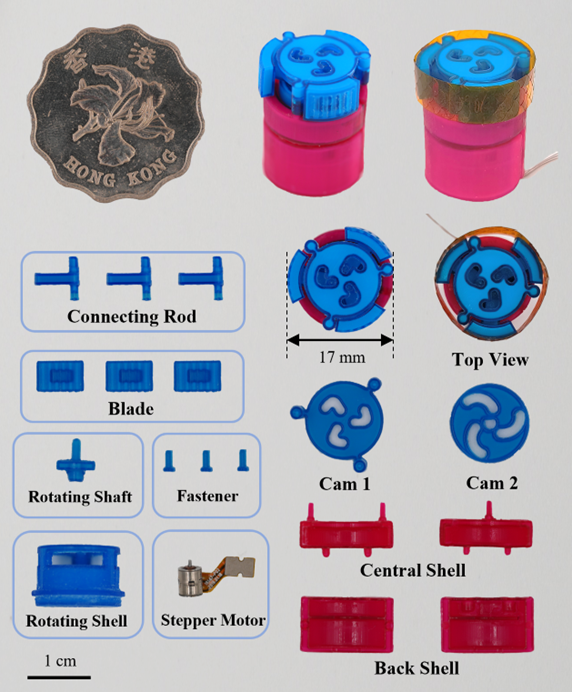
图5:组装完成的胶囊原型机及其关键部件展示。
从表征到验证:安全性与有效性数据
任何医疗设备从概念走向应用,都必须用扎实的数据说话。研究团队为此进行了一系列严格的体外实验。
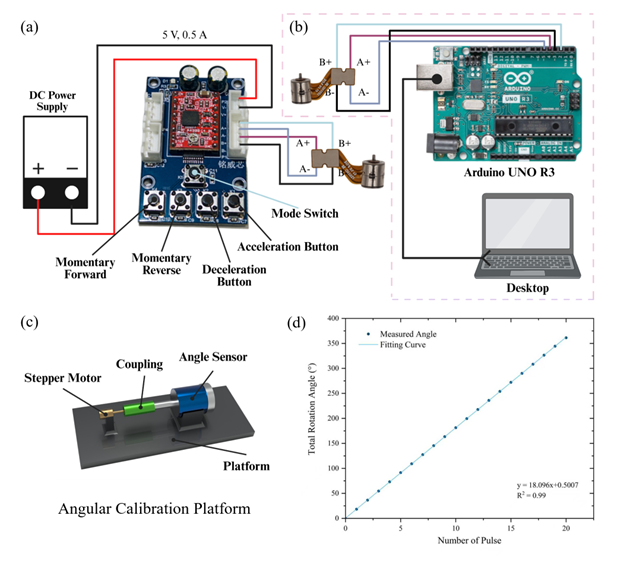
首先是对驱动与控制系统的验证。团队采用了PCB与Arduino控制系统,并对电机进行了精确标定,实现了输入脉冲与输出转角之间高达0.99的线性相关度,确保了动作的高度可重复性。
安全性是消化道活检设备的生命线。团队在离体猪组织上测试了穿刺深度和作用力。结果显示,穿刺深度中位数约为0.61毫米(范围0.46-0.66毫米),这属于典型的浅层黏膜活检深度,既能获取有效组织,又极大降低了穿孔风险。测量得到的作用力范围,在胃组织约为0.5-2.0牛,在小肠组织约为0.3-1.0牛,完全处于临床认可的胃肠道活检安全力范围之内。
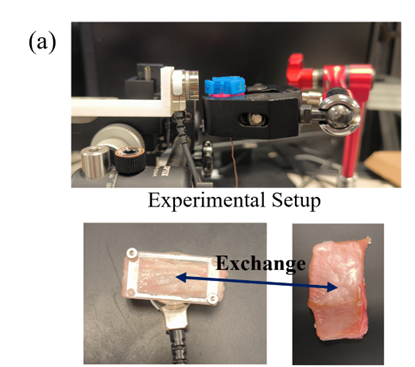
最终,也是最关键的活体验证实验给出了令人鼓舞的结果。刮取下来的组织样本能够被有效携带并存入胶囊内部的封装腔体。对获取的样本进行病理学(H&E)染色切片后,清晰观察到了黏膜及黏膜下层的组织结构。定量数据显示,平均每次操作,从胃部可获得约10.9毫克的样本,从小肠可获得约18.9毫克的样本,这已足够用于标准的病理分析。
展望与意义
这项研究的意义不言而喻。它不仅仅是一个巧妙的机器人设计,更是向实现真正无痛、无创的消化道全段筛查迈出的实质性一步。将可视化与活检功能集成于一个可吞服的胶囊中,有望在未来变革胃肠道疾病的早期诊断模式,特别是对于需要反复监测或不耐受传统内镜的患者群体。
当然,从实验室原型到临床产品,还有漫长的道路要走,包括体内环境验证、电池续航、样本防污染、大规模生产等挑战。但Kiri-Capsule所展示的仿生设计思路与微型化集成能力,无疑为下一代智能医疗机器人提供了一个极具启发性的范本。
参考文献:Zhao, R., Chu, Y., Zhao, S., Yue, W., Tang, R. S.-Y., & Ren, H. (2026). Bioinspired Kirigami Capsule Robot for Minimally Invasive Gastrointestinal Biopsy. ICRA, 2026.




