在机器人学与自动化领域,ICRA(国际机器人与自动化会议)无疑是每年技术风向的顶级标尺。刚刚公布的ICRA 2026入选论文名单中,微分智飞团队以11项科研成果的亮眼成绩,全面覆盖了从顶层决策到底层执行的五大核心技术方向,清晰地勾勒出下一代智能机器人的技术版图。
这五大方向——决策大脑、敏捷小脑、协同群脑、高精感知与灵巧操作——共同构成了一个完整的智能系统闭环。简单来说,就是让机器人不仅“看得清”、“想得明”,还能“动得快”、“配合好”、“干得巧”。
01# 决策大脑:机器人的智能指挥中枢
决策大脑是机器人的“指挥官”,负责在复杂未知环境中做出全局最优的自主决策。本次入选的研究,将目光投向了更具适应性的多模态机器人自主探索技术。
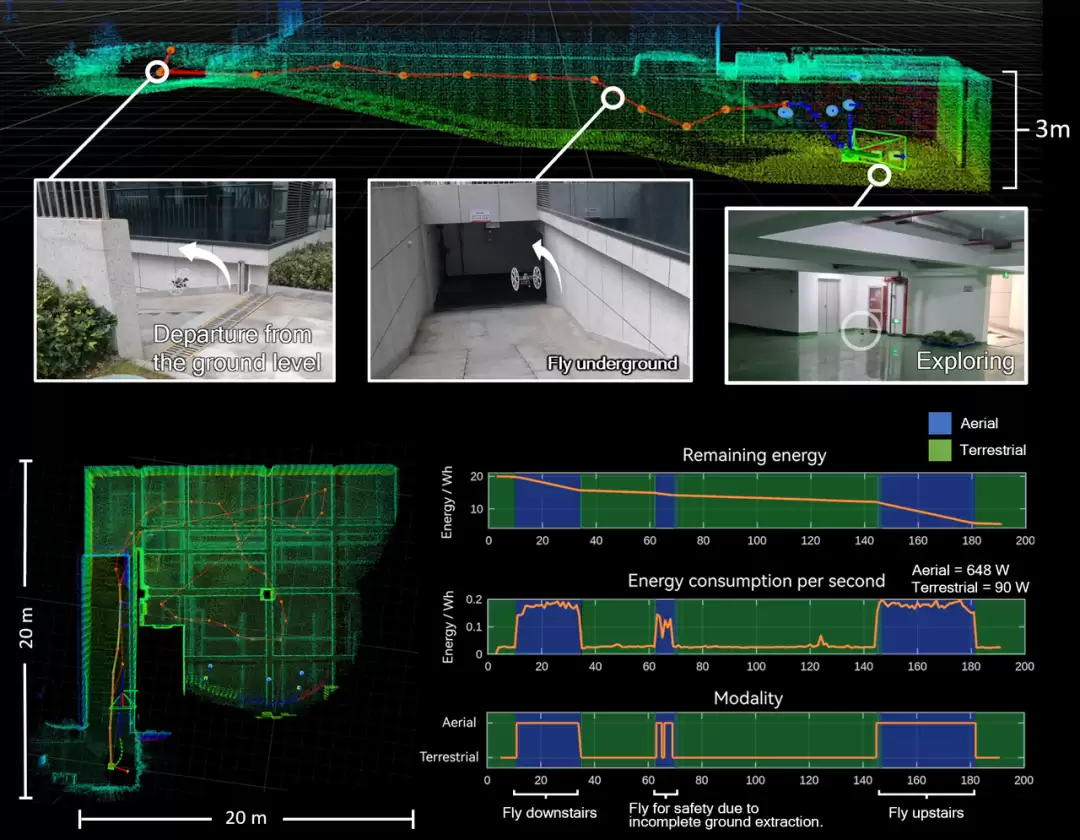
Autonomous Exploration with Terrestrial-Aerial Bimodal Vehicles
这项研究基于团队早先研发的陆空两栖机器人平台,提出了一套全新的自主探索框架。想象一下,一个既能在地面稳健行驶,又能随时起飞侦察的机器人,它如何规划自己的行动?该框架的核心在于,它能根据环境特征(如开阔地、狭窄通道)智能切换地面与空中模式,实现大范围未知区域的高效探索与实时地图构建,为搜救、勘探等任务提供了强大的自主决策能力。
02# 敏捷小脑:高速精准的运动控制核心
如果说“大脑”负责战略,那么“小脑”就关乎战术执行,即高速、精准、安全的运动控制能力。本次入选的几项工作,分别从硬件创新和算法优化两个层面,将机器人的“运动天赋”提升到了新高度。
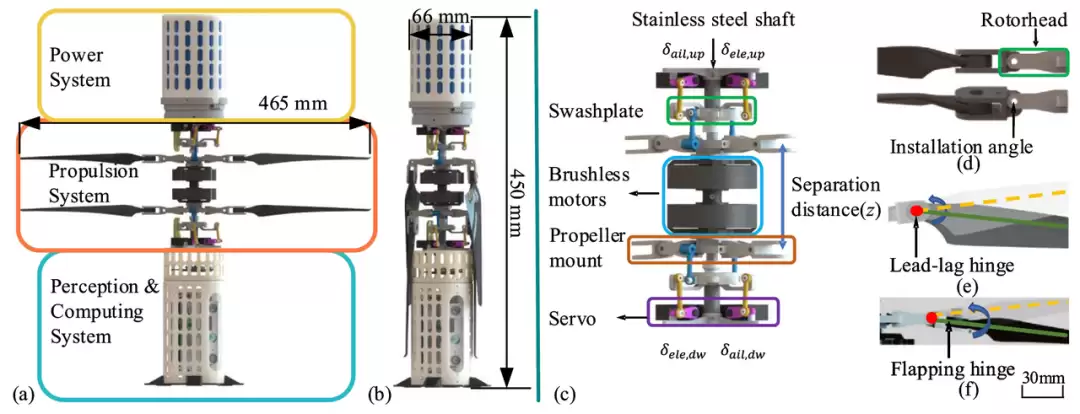
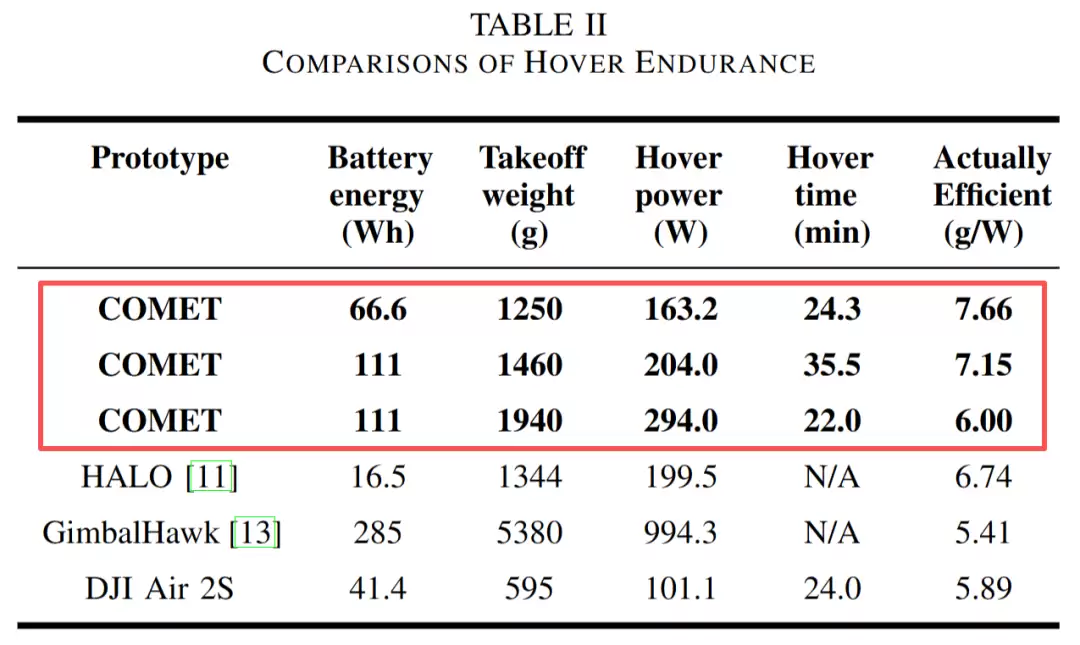
COMET: A Dual Swashplate Autonomous Coaxial Bi-Copter AA V with High-Maneuverability and Long-Endurance
首先在硬件上,团队设计了一款名为COMET的双斜盘共轴双旋翼无人机。传统多旋翼往往在机动性和续航上难以兼得,而COMET通过独特的双斜盘设计,实现了媲美直升机的敏捷操控,同时保持了较高的气动效率,为需要长时间、高强度作业的场景提供了理想的飞行平台。
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Robots in Unstructured Environments
在算法层面,针对像牵引拖车这样结构复杂、运动耦合度高的机器人,传统规划器往往力不从心。Tracailer专用轨迹规划器应运而生,它深度优化了这类欠驱动系统的运动特性,使其能在仓库、工地等非结构化环境中,依然规划出精准、安全的运动路径。

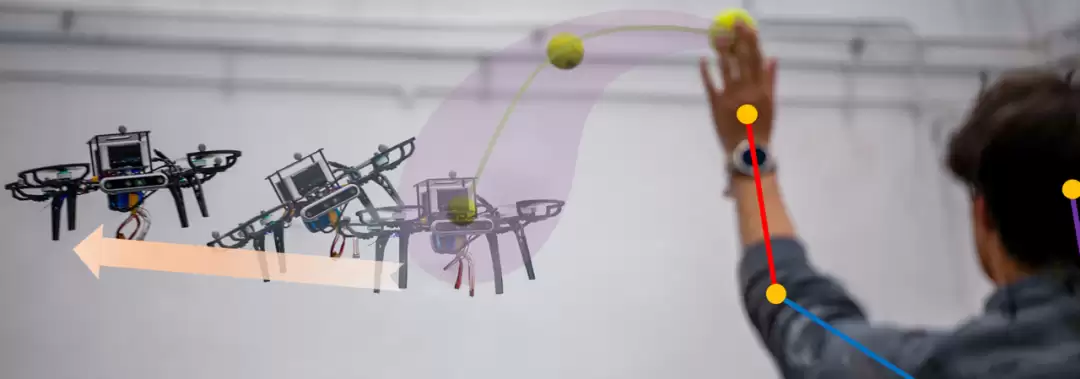
Threat-Aware UA V Dodging of Human-Thrown Projectiles with an RGB-D Camera
真正的敏捷,还包括应对突发威胁的能力。这项研究让无人机学会了“预判”。仅凭一个RGB-D相机,系统就能实时分析人体姿态,提前预测投掷物的轨迹,从而实现低延迟的主动规避,极大增强了无人机在动态环境中的生存能力。
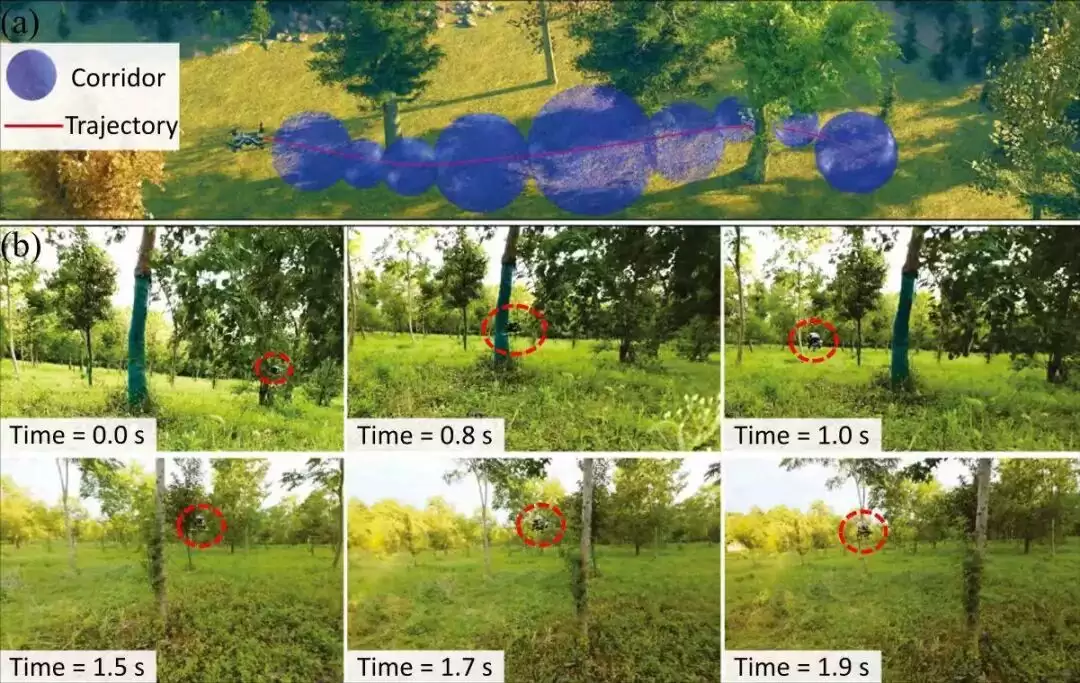
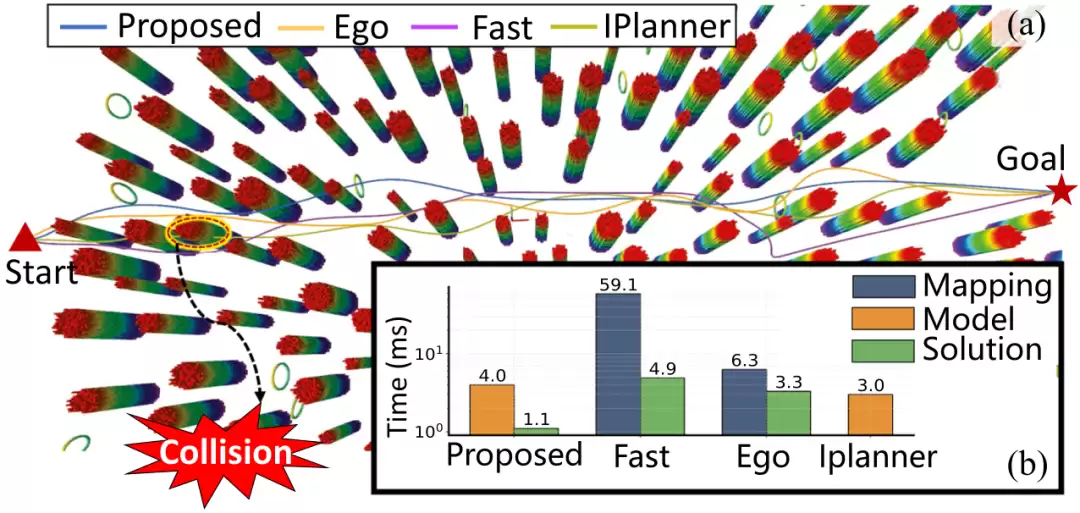
Dynamically Feasible Trajectory Generation with Optimization-Embedded Networks for Autonomous Flight
最后,为了在复杂环境中实现高速且鲁棒的飞行,团队提出了一种“优化嵌入网络”的轨迹生成方法。它将神经网络对安全空间的快速理解,与可微优化层的精确约束相结合,能实时生成既符合动力学模型、又绝对安全平滑的飞行轨迹,堪称高速自主飞行的“自动驾驶仪”。
03# 协同群脑:多机器人集群智能协作
单打独斗终有极限,群体协作才能释放更大效能。“协同群脑”关注的是如何让多个机器人像雁群一样高效、有序地集体行动。
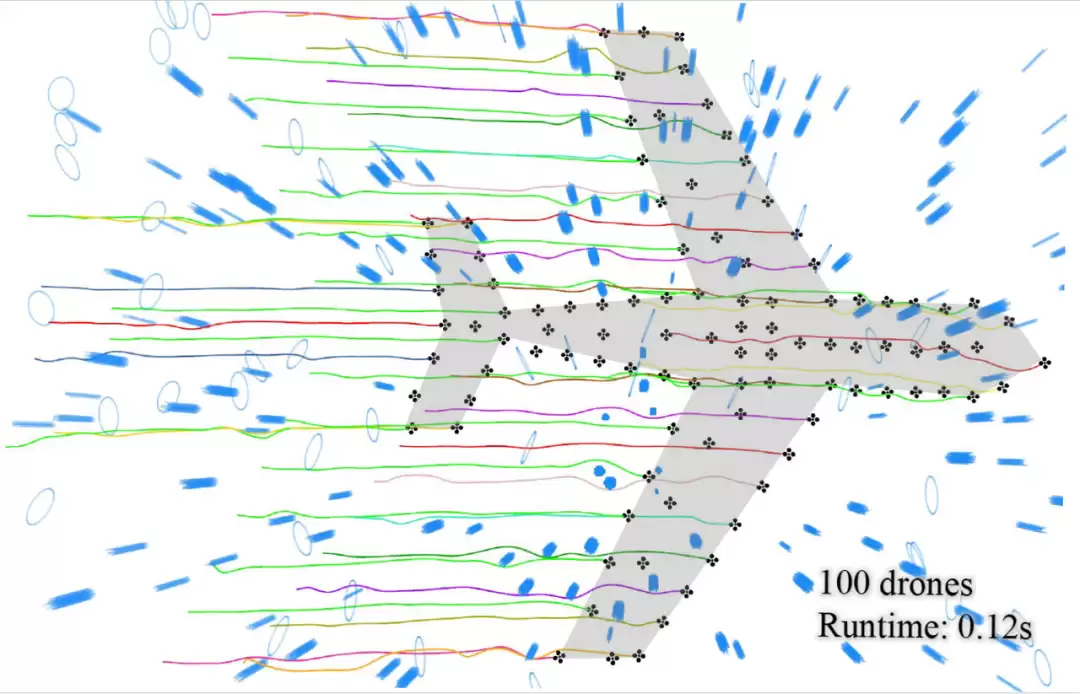
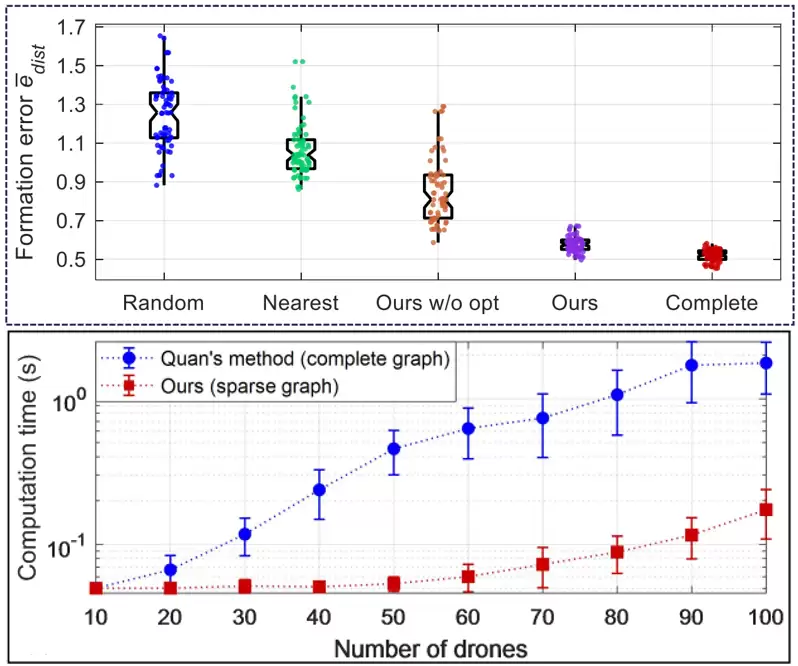
RE‑Formation: Resilient and Efficient Formation Planning in Large-Scale Distributed Aerial Swarms
RE-Formation方法正是为此而生。它专注于大规模无人机集群的编队规划,不仅追求高效,更强调鲁棒性。当集群中部分个体受到干扰或失效时,系统能快速、分布式地完成编队重构,保持整体作业的稳定性,这为物流配送、空中表演等大规模集群应用打下了坚实基础。
04# 高精感知:机器人的三维环境视觉
精准的行动离不开精准的感知。高精感知技术就是机器人的“眼睛”,致力于从复杂环境中提取可靠、实时的三维信息。
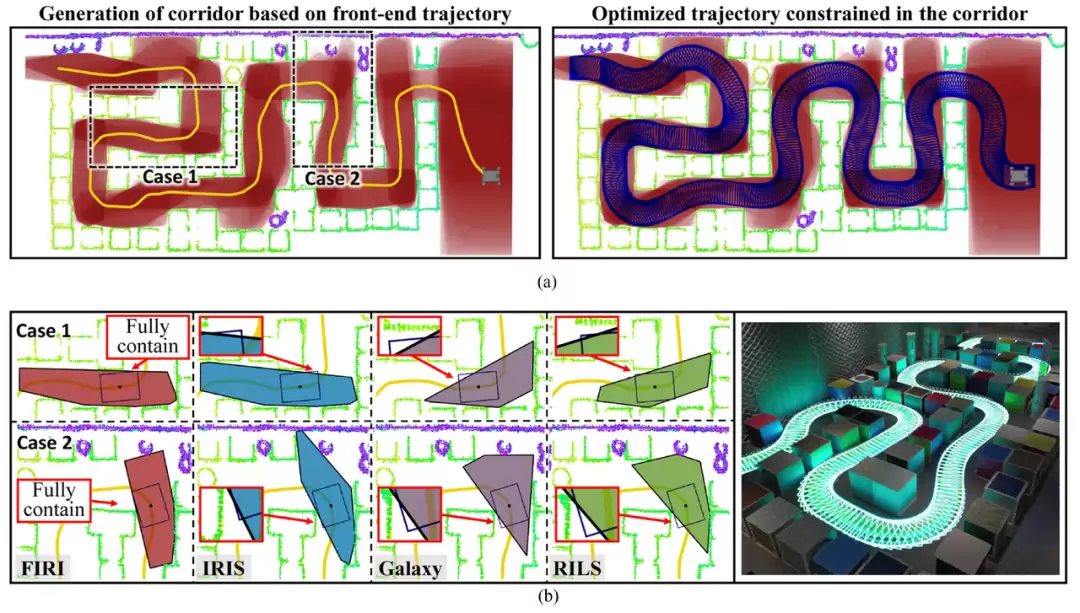
Fast Iterative Region Inflation for Computing Large 2-D/3-D Convex Regions of Obstacle-Free Space
规划的第一步是知道“哪里能走”。FIRI算法通过快速迭代区域膨胀,能在杂乱的环境中高效计算出最大、最规整的无障碍凸空间区域。这就像为机器人规划出了一条条宽阔安全的“走廊”,极大提升了后续运动规划的搜索效率和成功率。
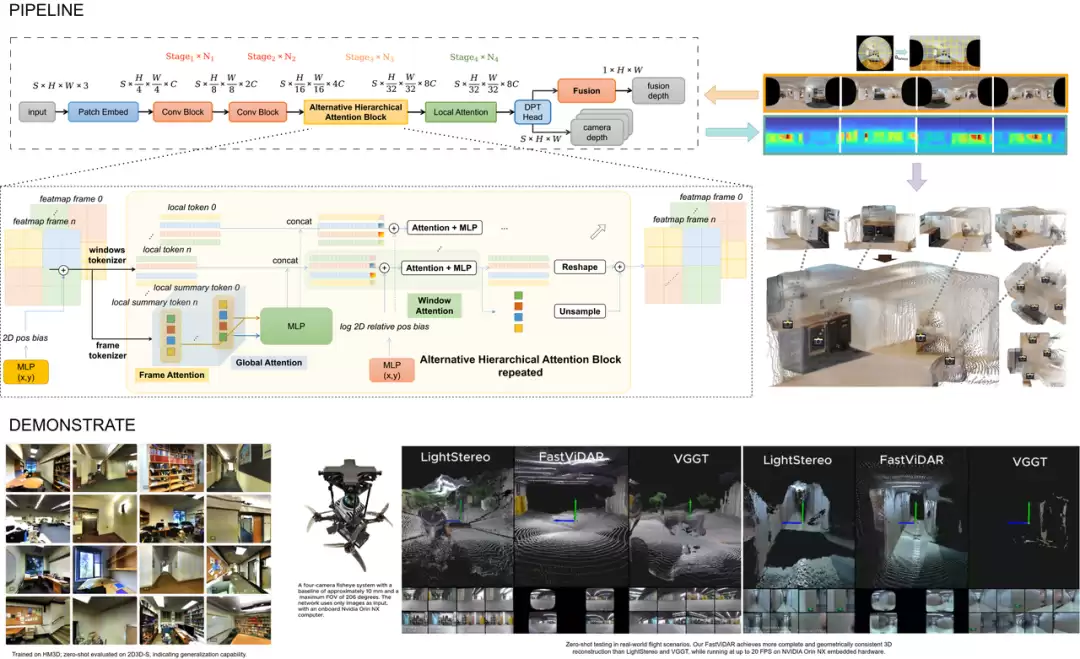
FastViDAR:Real-Time Omnidirectional Depth Estimation Via Alternative Hierarchical Attention
而对于需要全方位感知的机器人(如无人机),FastViDAR提供了一种高效的解决方案。它利用交替分层注意力机制,实现了高精度、高帧率的全向深度估计,让机器人能实时掌握周身360度的三维环境,为避障、交互提供关键的感知支撑。
05# 灵巧操作:精细物理交互与抓取
技术的最终价值在于执行,灵巧操作让机器人从“观察者”变为“实干家”,完成抓取、装配等精细物理交互任务。
TopAY: Efficient Trajectory Planning for Differential Drive Mobile Manipulators Via Topological Paths Search and Arc Length-Yaw Parameterization
对于移动机械臂这种“手脚并用”的复杂系统,规划其运动是个挑战。TopAY方法通过拓扑路径搜索和独特的弧长-偏航角参数化,能为差速驱动移动机械臂生成实时、安全且平滑的作业轨迹,显著提升了在复杂场景下的作业效率。

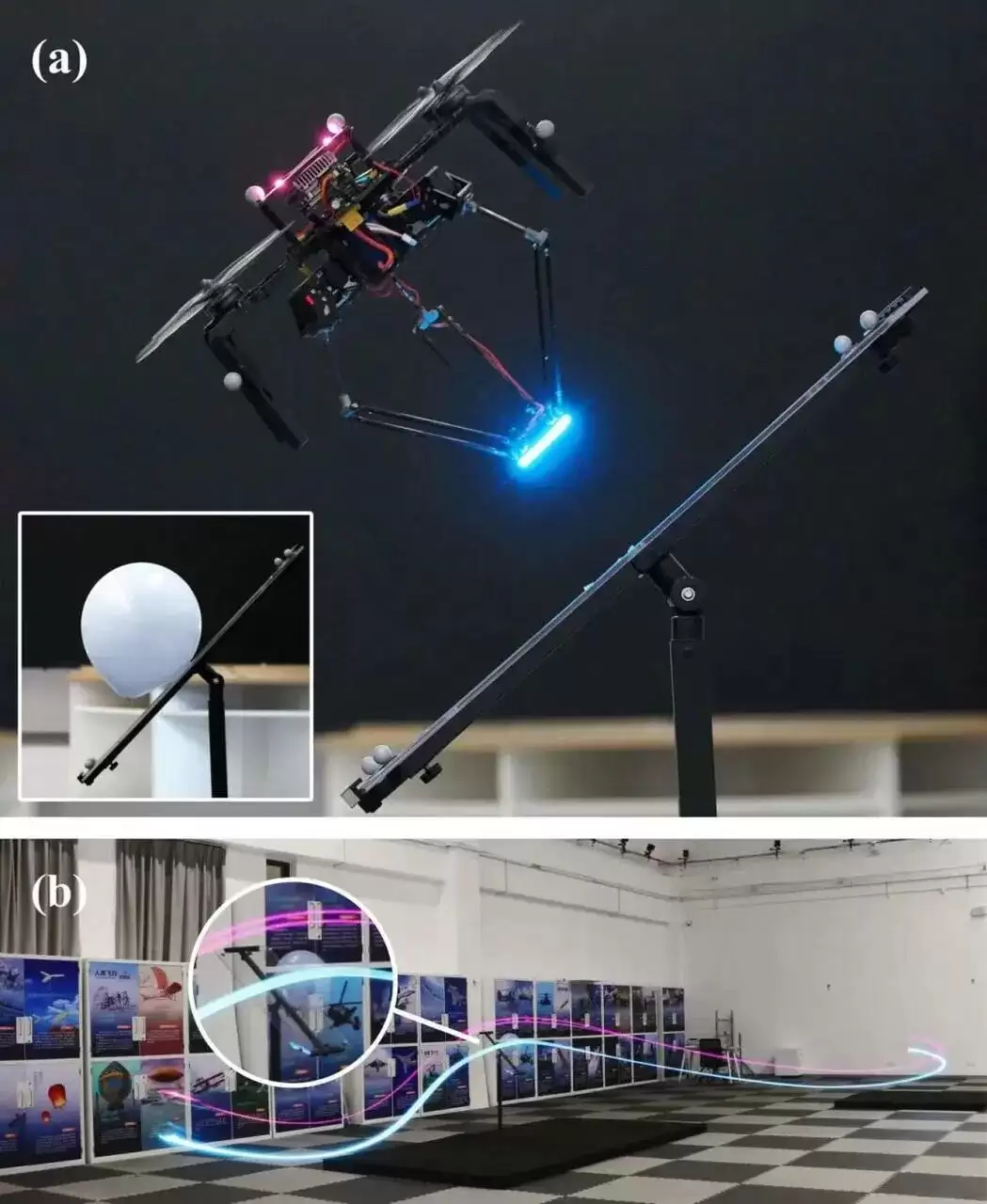
Whole-Body Integrated Motion Planning for Aerial Manipulators
将机械臂装上无人机,就构成了空中机械臂。这项研究提出了全身一体化运动规划方法,将无人机平台和机械臂视为一个整体进行协同优化,从而实现高动态、无碰撞的空中操作,为高空检修、空中采样等任务开辟了新可能。
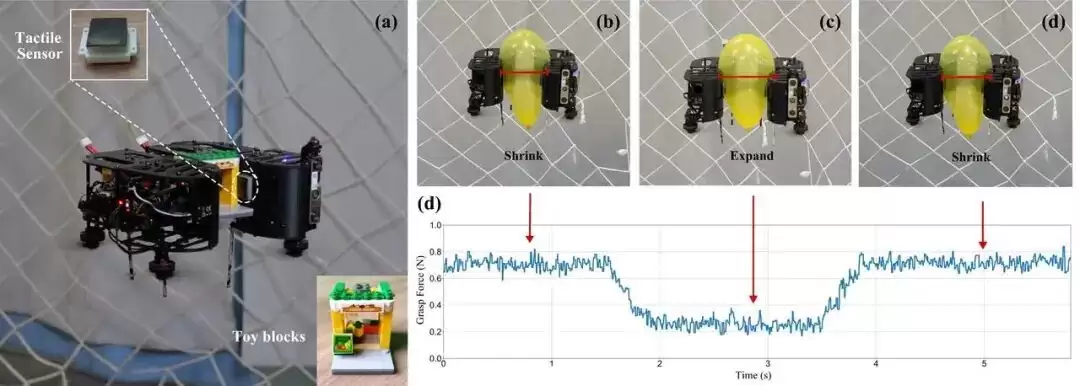
A Precise Real-Time Force-Aware Grasping System for Robust Aerial Manipulation
精细操作离不开力觉反馈。这套高精度实时力感知抓取系统,让空中机械臂拥有了“触觉”。通过力反馈与柔顺控制,无人机能在气流扰动等复杂环境下,稳定、可靠地完成抓取和交互,大幅提升了空中作业的精度和抗干扰能力。
纵观这11项成果,它们并非孤立的技术点,而是环环相扣、层层递进的技术体系。从环境感知与理解(高精感知),到个体与群体的智能决策与规划(决策大脑、协同群脑),再到精准、敏捷、安全的运动执行(敏捷小脑),最终完成复杂的物理交互(灵巧操作),形成了一套完整的自主机器人智能解决方案闭环。
此次ICRA 2026的重磅亮相,无疑是微分智飞团队在理论创新、系统设计与工程落地全链条能力的一次集中检阅。这些前沿探索,正持续为自主机器人产业的升级注入核心驱动力,也在不断定义着下一代智能机器人的技术形态与能力边界。




