当你在厨房做饭时,如果看到锅子开始倾斜,你会立刻调整;如果食物掉了,你会马上反应过来重新处理。这种在问题发生前预防和发生后快速应对的能力,正是北京大学、北京智源人工智能研究院等机构联合发表的最新研究想要赋予机器人的核心技能。这项名为"Code-as-Monitor"的研究成果于2024年12月发表,论文编号为arXiv:2412.04455v3,代表了机器人故障检测领域的一次重要突破。
在现实世界中,机器人执行复杂任务时难免会遇到各种意外情况。就像一个新手厨师在做菜时可能会打翻调料、切错食材或者火候掌握不当一样,机器人在搬运物品、操作工具时也会面临类似的挑战。传统的机器人通常只能在问题发生后才意识到出了错,这就像是一个只有在菜烧糊了之后才发现火开得太大的厨师。而这项研究的创新之处在于,它让机器人既能在问题发生前就察觉到潜在危险并及时调整,也能在意外发生后迅速识别并采取补救措施。
研究团队将这种双重能力分别称为"主动故障检测"和"被动故障检测"。主动故障检测就像是一个经验丰富的厨师,能够在锅子刚开始倾斜时就察觉到危险并立即调整,避免食物洒出来。而被动故障检测则是在意外已经发生后,比如食物真的洒了,能够迅速识别这个问题并决定如何处理。
这项研究的核心创新在于一种全新的"代码监督"方法。研究人员没有让机器人直接观察复杂的视觉画面来判断是否出错,而是将监督任务转化为一个巧妙的"几何约束满足"问题。他们首先将机器人需要关注的物体或物体部分抽象为简单的几何元素,比如点、线、面,然后通过编写专门的监督代码来实时检查这些几何元素之间的关系是否符合预期。
为了更好地理解这个概念,我们可以用搭积木来类比。当机器人要将一个红色积木放到蓝色积木上面时,传统方法需要机器人理解整个复杂的视觉场景。而新方法则将这个任务简化为:红色积木的中心点应该在蓝色积木的表面上方,两者之间的距离应该小于某个阈值。这样的约束关系可以用简单的数学代码来表达和检查,既精确又高效。
研究团队开发了一个名为"ConSeg"的智能分割模型,它能够根据任务要求自动识别出场景中的关键物体及其重要部分,然后将这些复杂的视觉信息转换为简洁的几何元素。这个过程就像是一个经验丰富的画家,能够用几笔简单的线条就勾勒出一个复杂场景的精髓。
整个系统的工作流程可以比作一个高效的餐厅运作过程。首先,"约束生成器"就像是总厨,根据顾客点的菜(任务指令)制定详细的制作步骤和质量标准。然后,"约束描绘器"像是负责备菜的厨师,将复杂的食材处理为标准化的半成品(几何元素)。最后,"约束监督器"就像是质检员,实时检查每个制作环节是否符合标准,一旦发现问题立即报告。
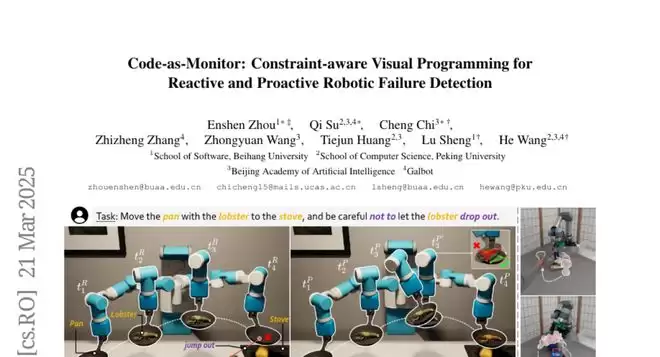
在实验验证阶段,研究团队在三个不同的模拟环境和真实机器人平台上进行了广泛测试。他们设计了各种具有挑战性的场景,比如在机器人搬运装有龙虾的平底锅时,故意制造各种干扰:让龙虾突然跳出来、让平底锅意外倾斜、或者在搬运过程中移动目标位置等。实验结果显示,采用新方法的机器人在面对严重干扰时,成功率比传统方法提高了28.7%,同时执行时间缩短了31.8%。
这种显著的性能提升主要归功于两个关键优势。首先是检测精度的大幅提升。传统的视觉问答方法往往受限于对3D空间关系理解的不准确,而新方法通过精确的几何计算能够准确判断物体之间的位置关系。其次是响应速度的显著加快。传统方法需要频繁调用大型视觉语言模型进行分析,而新方法只需要在任务开始时生成一次监督代码,之后就能通过快速的数学运算进行实时监督。
研究团队还特别关注了系统的通用性。他们发现,通过几何元素的抽象表示,同样的监督框架可以轻松适应不同类型的机器人、不同的操作工具以及完全不同的任务场景。这就像是一套通用的质量检查标准,无论是在中餐厨房还是西餐厨房,无论是制作简单的煎蛋还是复杂的法式大餐,都能发挥作用。
在处理复杂长期任务时,这套系统展现出了特别的优势。研究人员设计了一个具有挑战性的场景:让机器人在杂乱的桌面上清理物品,但要保留所有的动物模型,并且按照动物与水果的距离远近来安排抓取顺序。在这种需要理解抽象概念(什么是动物、什么是水果)、进行复杂推理(计算距离关系)、并且在动态变化环境中操作的任务中,传统的开环控制机器人往往会失败。而配备了新监督系统的机器人不仅能够成功完成任务,还能在人为干扰(比如移动物品位置)时实时调整策略。
这项研究的技术创新还体现在对不同类型约束的统一处理上。无论是点级约束(比如抓手必须对准物体中心)、线级约束(比如工具必须与物体表面垂直)、还是面级约束(比如容器必须保持水平),都能在同一个框架内得到有效处理。这种统一性大大简化了系统的设计和维护,也为未来扩展到更复杂的任务类型奠定了基础。
研究团队在论文中详细分析了不同设计选择对系统性能的影响。他们发现,使用多视角图像相比单一视角能够显著提升检测准确性,这是因为多角度观察能够减少视觉遮挡带来的信息缺失。同时,他们的约束感知分割模型相比通用的语义分割方法能够更准确地识别与任务相关的物体部分,这直接影响了后续监督的效果。
值得特别关注的是,这项研究在实际应用中展现出的灵活性。研究团队测试了从简单的拿取放置任务到复杂的工具使用任务的各种场景。在每种场景中,系统都能够根据任务特点自动生成相应的监督代码,而不需要人工编程。这种自适应能力使得同一套系统能够处理餐厅服务、仓库管理、家庭助理等完全不同的应用领域。
从技术实现的角度来看,研究团队巧妙地将传统的故障检测问题转化为一个"时空约束满足"问题。这种转化的巧妙之处在于,它将复杂的视觉理解任务转换为相对简单的几何计算任务。就像是将一道复杂的数学应用题转换为几个基本的算术运算,既降低了计算复杂度,又提高了求解准确性。
研究还显示出了良好的可扩展性。通过在不同的机器人平台上测试,包括工业机器人手臂、移动操作机器人以及灵巧手系统,研究团队验证了方法的普适性。每个平台都能够在不需要大幅修改的情况下集成这套监督系统,这为实际产业化应用奠定了坚实基础。
特别值得一提的是,这项研究在处理开放集合场景方面的突破。传统的故障检测系统通常只能处理预先定义好的故障类型,就像是只能识别几种固定错误的检查程序。而新系统能够处理前所未见的物体和场景,这种开放性来源于几何抽象的通用性和视觉语言模型的泛化能力。
研究团队通过大量的对比实验验证了各个技术组件的必要性。他们发现,同时使用主动和被动故障检测相比单独使用任何一种都能获得更好的效果。主动检测能够预防大部分可预见的问题,而被动检测则为处理突发意外提供了保障。这种双重保险机制确保了系统在复杂环境中的可靠性。
从计算效率的角度分析,新方法相比传统的频繁视觉问答方法显著减少了计算开销。这主要得益于代码执行的高效性:一旦生成了监督代码,系统就能通过简单的数学运算进行实时检查,而不需要反复调用计算密集的深度学习模型。这种效率提升使得系统能够在资源受限的机器人平台上部署。
研究的另一个重要贡献是建立了一套完整的约束感知分割数据集。这个数据集不仅包含了实例级别的物体分割,还包含了部件级别的精细分割,为训练能够理解任务相关约束的视觉模型提供了宝贵资源。数据集的构建过程本身就体现了研究团队的创新思维:他们将轨迹级别的机器人操作数据转换为帧级别的约束标注,为监督学习提供了丰富的训练样本。
在实际部署方面,研究团队考虑了系统的实用性问题。他们设计的监督代码生成过程高度自动化,只需要提供任务描述和初始观察就能自动生成相应的监督逻辑。这种自动化程度使得非专业用户也能够使用这套系统,大大降低了应用门槛。
值得注意的是,这项研究还具有良好的模块化设计。整个系统的三个核心组件(约束生成、元素提取、代码监督)都可以独立优化和替换,这为未来的技术升级和改进提供了灵活性。研究团队已经展示了在不同组件中使用不同技术方案的可能性,为后续研究指明了多个发展方向。
说到底,这项研究最让人兴奋的地方在于它为机器人技术的实用化铺平了道路。通过将复杂的故障检测问题转化为可计算的约束满足问题,研究团队不仅提升了检测精度和响应速度,更重要的是创造了一种可以广泛应用的技术框架。这就像是发明了一种通用的"机器人安全检查标准",无论机器人要执行什么任务,都能用这套标准来确保操作的安全性和准确性。
对于普通人而言,这项研究意味着我们离真正实用的家用机器人又近了一步。设想一下,未来的家用机器人不仅能够执行复杂的家务任务,还能在出现问题时自主判断和调整,甚至在问题发生前就预防意外。无论是帮助老人起居、协助残障人士日常生活,还是在危险环境中替代人类工作,这种具备"预知能力"的机器人都将发挥重要作用。而这一切的基础,正是这项看似技术性很强,实际上具有深远实用价值的研究成果。
Q&A
Q1:Code-as-Monitor技术到底是怎么工作的?
A:Code-as-Monitor将机器人故障检测转化为几何约束检查问题。系统首先将复杂的物体抽象为简单的点、线、面等几何元素,然后自动生成监督代码来检查这些元素间的位置关系是否正确,就像用数学公式检查积木是否摆放正确一样。
Q2:这项技术比传统机器人故障检测有什么优势?
A:主要有两大优势:一是精确度更高,通过几何计算比视觉判断更准确;二是速度更快,只需在开始时生成一次代码,之后通过简单运算就能实时监督,不用反复调用复杂的AI模型。实验显示成功率提升28.7%,执行时间缩短31.8%。
Q3:这个技术什么时候能用到家用机器人上?
A:目前技术已在多个机器人平台验证成功,包括工业机器人和灵巧手系统。虽然还需要进一步工程化,但其模块化设计和良好兼容性为实际应用奠定了基础。预计随着相关技术成熟,未来几年内可能看到商用化产品。




