近期,Socionext 与日本东北大学 Okatani 教授团队联合宣布了一项重大突破——他们成功将 SLAM(同步定位与建图)的处理时间压缩至传统方法的六十分之一。这一成果已被计算机视觉顶级会议 ICCV 接收,并在 2021 年的线上会议中正式发布。
作为自主设备的核心技术之一,SLAM 根据感知方式主要分为两大类:一类依赖激光测距的 LiDAR SLAM,另一类基于摄像头图像的 Visual SLAM。近年来,Visual SLAM 发展势头强劲,原因在于摄像头成本低廉,且能够将定位与图像识别功能整合,极大扩展了应用场景。
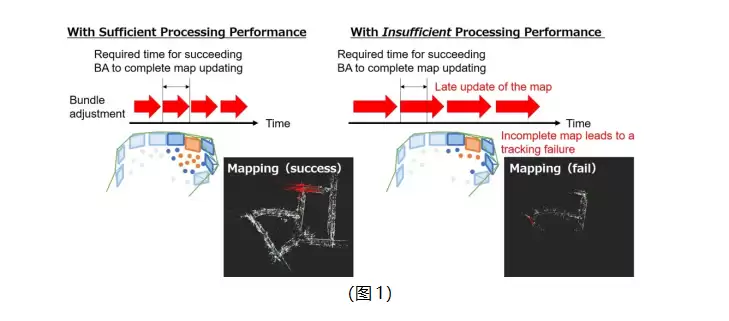
深度学习技术的引入推动了图像识别能力的飞跃,也为 Visual SLAM 注入了全新动力。然而,束调整(Bundle Adjustment, BA)始终是绕不开的关键瓶颈。BA 负责优化 3D 地图点和相机位姿,计算量极其庞大,尤其在边缘设备上,受限于 CPU 性能与功耗控制,传统方法运行十分吃力,严重制约了实际部署。
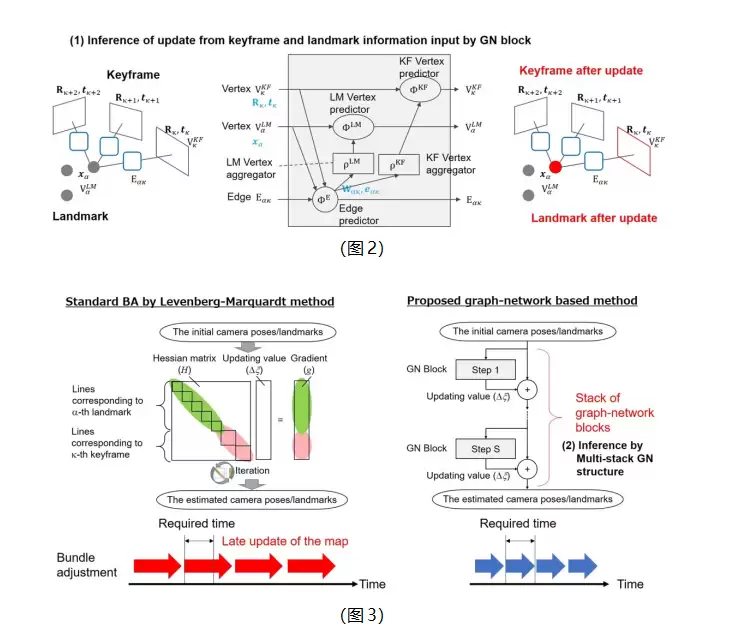
如何破解这一难题?研究团队提出了一种创新思路:利用图神经网络(Graph Network)进行近似推理。具体而言,从图神经网络模块输入关键帧与地标信息,让网络直接推断出更新量,再通过多层堆叠结构逐步收敛到最终结果。相比传统 Levenberg‑Marquardt 优化方法,这种推理方式显著降低了计算负担。
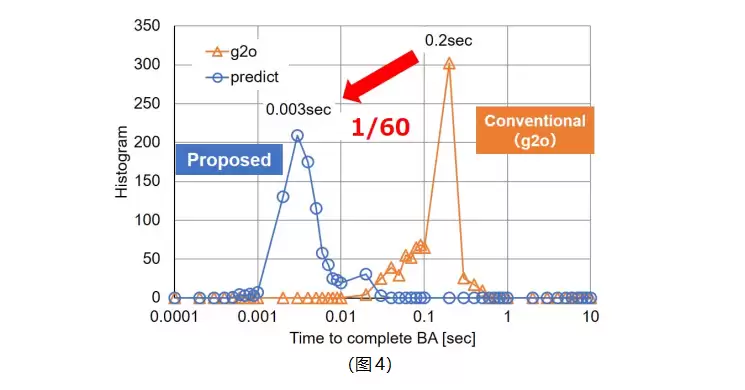
为验证效果,团队将这套新方法应用于 Visual SLAM 的束调整环节,并与业界常用的 g2o 框架进行了对比。PC 仿真结果表明,新方法的处理时间仅为 g2o 的六十分之一,效果令人震撼。
对 Socionext 而言,这项研究不仅是学术上的突破,更是产品化的重要起点。他们计划将 Visual SLAM 技术集成到定制 SoC 方案中,为工业设备、移动平台等有图像识别需求的客户带来性能跃升。与此同时,团队将继续挖掘这种推理方法的潜力,力争将其扩展至图像识别以外的更多领域。
关于 Socionext Inc.
Socionext 是一家全球领先的片上系统(SoC)设计、研发与销售企业,聚焦消费电子、汽车及工业领域的先进技术。公司成立于 2015 年,总部位于日本横滨,并在亚洲、美国、欧洲设有办事处,致力于为客户提供高效的解决方案与卓越体验。