过去几年,机器人视觉学习已经迈过了一道重要的门槛。像π₀.₅、GR00T N1.5这类在大规模异构数据上预训练的VLA模型,正在成为下游操作任务的通用起点:拿到checkpoint,针对具体任务微调,再部署到真实机器人上。
然而,触觉操作领域一直缺少这样的“基础模型时刻”。现有的触觉策略,绝大多数还是为特定硬件量身定做的:一个传感器、一只手、一个任务集,对应一套模型。虽然无论是GelSight、Contactile,还是力/力矩传感器,都能提供触觉信息,但它们的输入格式、分辨率和物理形态千差万别,导致已有的经验很难跨传感器、跨平台复用。
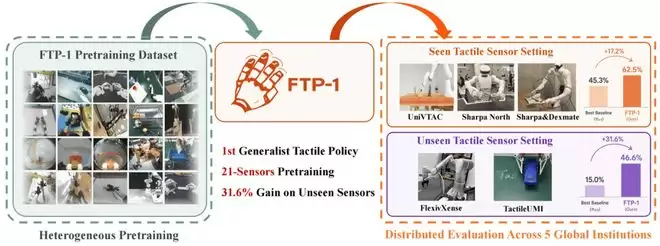
来自Sharpa、清华大学、UC Berkeley、上海交通大学、ETH Zurich等机构的研究者,终于拿出了首个通用触觉基础策略——FTP-1。它基于大约3,000小时、来自26个数据来源和21种触觉传感器的数据进行预训练。结果很惊人:它不仅能够在不同的具身平台之间迁移,即使在预训练阶段从未见过的传感器上,也展现出了很强的泛化能力,成功率提升超过31个百分点。
论文标题:FTP-1: A Generalist Foundation Tactile Policy Across Tactile Sensors for Contact-Rich Manipulation
论文地址:https://arxiv.org/abs/2606.13102
GitHub:https://ftp1-policy.github.io/
一个长期难题:触觉数据很重要,却很难被统一利用
通用的视觉-语言-动作(VLA)策略已经证明,大规模数据和异构数据可以带来可迁移的操作能力。但真正的接触密集型操作,比如插入、力控擦拭、手内调整、拧瓶盖等,不能只依赖视觉。机器人需要知道接触是否稳定、力是否偏移、物体是否即将打滑,以及当前动作是否需要减速或调整。
长期以来,触觉学习难以规模化,主要卡在三个问题上:
- 不同传感器难迁移。现有触觉策略大多绑定特定硬件,不同传感器、具身平台和观察格式之间难以复用,GelSight、Contactile与力/力矩数据之间也很难直接迁移。
- 简单融合往往无效。直接把触觉token注入VLM backbone,可能反而干扰原有的视觉-语言知识。在Sharpa North长程任务中,Tactile-VLA成功率为35.8%,低于π₀.₅的45.3%,这说明触觉需要专门的架构来处理。
- 缺少统一预训练语料。相比互联网图像和EgoScale超过20,000小时的人类视频,触觉操作长期缺少跨传感器、跨机械手和夹爪的统一数据集。FTP-1-Dataset正是为了填补这一缺口而来。
FTP-1想要回答的核心问题是:一个触觉策略,能否吸收异构的触觉经验,并迁移到预训练之外的传感器和机器人本体上?
方案:形态感知token + 独立触觉专家
FTP-1基于π₀.₅的多专家VLA架构进行扩展,实现了两点核心创新。
Morphology-Aware Tactile Token Space(MTTS,形态感知触觉token空间)
MTTS提供了一个统一接口,可以把任意触觉输入映射到24个功能区域token上。输入可以是GelSight这类图像,也可以是Contactile这类阵列,或是力/力矩状态量;映射后的token则对应语义一致的手部区域,比如拇指指尖、食指指尖、掌心、腕部力/力矩等。
功能区域embedding会告诉模型:每个token来自末端执行器的哪个位置,而不依赖具体的物理传感器。平行夹爪可以映射到拇指和食指槽位,灵巧手可以使用0-14号槽位,腕部和手指力/力矩传感器使用15-20号槽位。硬件不同,但语义保持一致。
Independent Tactile Transformer Expert(独立触觉Transformer专家,约300M参数)
不同于adapter式的融合,FTP-1会把所有触觉token路由到一个专门的触觉专家模块,再由动作头读取这些触觉表示;同时,它不会把梯度反传到视觉-语言专家中。这样既能保护原有的VLM知识,又能学习可复用的触觉表示。
在下游微调阶段,如果遇到预训练中没见过的新传感器,只需要从头训练对应的传感器encoder;预训练好的触觉专家、功能区域embedding,以及共享的图像-触觉Transformer模块都可以继续复用。
数据:FTP-1-Dataset,3,000小时、21种传感器、26个来源
基础模型能否成立,数据规模至关重要。FTP-1-Dataset汇集了来自26个来源的约3,000小时触觉操作数据,包含21种不同的触觉传感器(7种图像、5种阵列、9种状态)。重采样后的数据混合了大约20%的人类数据、30%的灵巧手数据、50%的夹爪数据。
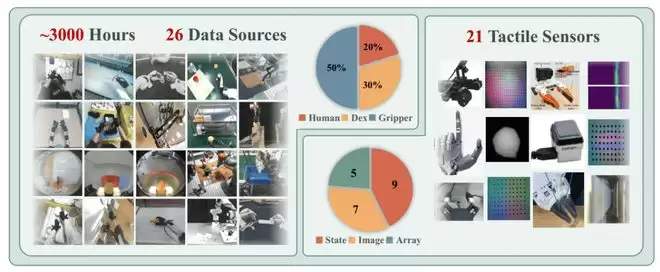
其中,Sharpa贡献了Sharpa North-FTP-1:4,000条在Sharpa North上采集的长程灵巧操作示教,使用的是Sharpa DTC(Dynamic Tactile Array,动态触觉阵列)传感器。Sharpa DTC也是预训练混合数据中的21种传感器之一。
所有标注都在MTTS框架下统一标准化,语言指令也通过GPT-4o进行改写,以增强表达多样性。它的意义类似于触觉领域的ImageNet:不是简单堆更多数据,而是在异构原始信号之上建立一个共享表示层。
测试:5家机构、14个任务,覆盖已见与未见传感器
FTP-1的checkpoint被分发给全球5家独立机构,用于下游微调和验证。这是一次对可复现性和迁移能力都更严格的测试。
已见传感器设置(出现在预训练混合数据中)
未见传感器设置(未出现在预训练中)
整体来看,14个任务覆盖了手内调整、力控按压、插入/拔出、柔性物体交互,以及长程双臂操作。
结果:已知传感器提升17.2个百分点,未见传感器提升31.6个百分点
在仿真环境UniVTAC中,FTP-1的平均成功率达到66.7%,比最强基线高出17.5个百分点。如果排除相对简单的抓取,只看更依赖接触反馈的任务,FTP-1达到59.5%,而只做了架构改造、没有触觉预训练的FTP-π₀.₅为42.0%。
在真实机器人、且传感器已出现在预训练数据中的设置下,FTP-1的平均成功率为62.5%,比π₀.₅的45.3%高出17.2个百分点:
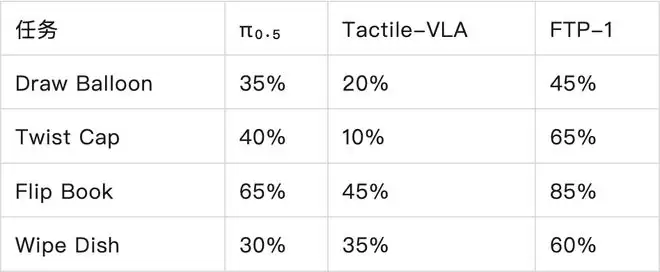
Twist Cap和Wipe Dish这两个任务尤其能说明问题。π₀.₅会持续顶住瓶盖,却缺少对力的反应式调整;擦盘子时也容易丢失接触。相比之下,FTP-1能保持更稳定的压力,并在触觉反馈提示对位不准时主动放慢插入动作。
未见传感器上的结果更关键:FTP-1比最强基线模型高出31.6个百分点,而且只需要从头训练传感器encoder。Insert Hanoi任务中,FTP-1展现出反应式插入控制,在对位不准时会减速;Insert USB中,即使只有100条示范数据,FTP-1也能生成稳定的接触感知动作,而基线模型更容易抖动并失败。
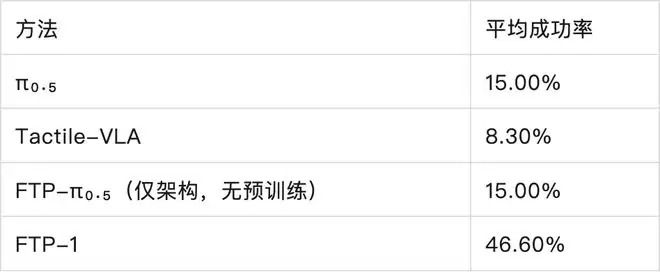
消融实验进一步说明,这不是“数据距离更近”带来的偶然结果。没有触觉预训练的NTP-1,即使采用相同的微调架构,在未见FlexivXense传感器上仍明显落后于FTP-1。这表明FTP-1学到的是可迁移的触觉知识,而不是某个传感器或某个任务的局部技巧。
为什么Sharpa是关键支点?
FTP-1并不是Sharpa技术栈之外的外部研究,而是建立在Sharpa的硬件、数据和模型能力之上。
Sharpa Wa ve的Dynamic Tactile Array(动态触觉阵列)在每个指尖提供超过1,000个触觉像素,并支持6-DoF力/力矩信息,是FTP-1预训练语料中的重要组成部分;Sharpa North则作为真实机器人评测平台,承担Draw Balloon、Fix Hand、Twist Cap等长程接触任务,验证触觉预训练在复杂操作中的价值。
更重要的是,Sharpa Wa ve的22-DoF拟人化动作空间,与EgoScale、T-Rex等研究中的动作表示形成呼应,使硬件、数据和模型围绕同一具身标准逐步对齐。FTP-1也进一步验证了CraftNet的判断:触觉不应只是视觉-语言模型的附属输入,而需要独立、高频、可迁移的表示与控制通路。结合Isaac Sim资产与真实Wa ve灵巧手,Sharpa正在从触觉硬件走向基础模型与生态闭环。
更大的图景:触觉进入基础模型时代
多年来,触觉机器人一直面临一个循环难题:没有共享表示,就难以形成共享数据集;没有共享数据集,又难以训练共享模型。FTP-1用三个核心组件打破了这个循环。
- MTTS:一种覆盖21种传感器的通用触觉token语言
- FTP-1-Dataset:约3,000小时异构触觉操作经验
- Tactile Expert:可复用的预训练触觉表示,而不是每个传感器从零训练
- 开放发布:预训练模型、数据集和训练代码已在ftp1-policy.github.io提供。
结合SaTA的空间触觉定位、Tacmap的触觉仿真到现实迁移、T-Rex的高频触觉反应,以及CraftNet的分层VTLA架构,FTP-1让Sharpa触觉智能的技术路径变得更完整:触觉能力可以像视觉能力一样,被预训练、共享并迁移。
对Sharpa来说,FTP-1也帮助Wa ve的硬件价值进一步延伸到软件层。未来,在Sharpa平台上采集的每一小时触觉数据,都不再只服务于某一个具体任务,而是会持续沉淀为可复用的模型能力,推动整个触觉机器人生态共同进化。
更多相关research:
- SaTA —— Spatially-Anchored Tactile Awareness
- CraftNet —— Hierarchical VTLA for Fine Manipulation
- T-Rex —— Tactile-Reactive Dexterous Manipulation