工业物理AI后训练落地的可信仿真评估基础设施
类型:热点整理2026-07-03
当前工业具身智能在落地过程中正面临评估体系与真实场景严重脱节等多重挑战,这直接制约了后训练专属模型从实验室走向产线的进程。本文提出基于NVIDIA Isaac Lab的可信仿真评估体系,构建了双层验证机制、三层解耦架构与三维评估指标体系,并通过工业精密零件分拣场景验证了“仿真前置校验—真机精准落地”
当前工业具身智能在落地过程中正面临评估体系与真实场景严重脱节等多重挑战,这直接制约了后训练专属模型从实验室走向产线的进程。本文提出基于NVIDIA Isaac Lab的可信仿真评估体系,构建了双层验证机制、三层解耦架构与三维评估指标体系,并通过工业精密零件分拣场景验证了“仿真前置校验—真机精准落地”的闭环范式,为后训练专属模型的工程化落地提供了系统性的支撑。
点击视频,快速了解全文核心干货
**可信仿真评估:工业 Physical AI 后训练模型落地的关键基础设施**
亚信科技(中国)有限公司
**摘要:** 当前工业具身智能落地正普遍面临学术评估与实际脱节、真机测试成本高昂、长尾工况难以全面覆盖的困境,传统方式已无法有效支撑针对特定场景的后训练专属模型从实验室走向产线量产。本文从 Physical AI 工程化迭代的角度切入,指出构建高可信、高通量、可复现的仿真评估体系,是打通模型后训练到工业部署的关键支撑。围绕这一核心,本文基于 NVIDIA Isaac Lab 搭建了双层可信验证、三层解耦架构与三维工业评估指标,形成了“仿真前置校验、真机精准落地”的闭环范式;并以工业精密零件分拣为实践案例,验证了该体系在短板定位、扰动泛化、风险前置防控方面的显著工程价值。文中还介绍了 SDD+Harness 标准化仿真环境构建能力,为仿真评估的工程化落地提供了可复用的路径,最终推动 Physical AI 从算法验证走向规模化、可稳定交付的工业部署。
**一**
**行业现状与核心痛点:工业具身智能评估的落地困境**
**(一)研发范式迭代:从学术榜单验证到工业场景交付**
现阶段具身智能的研发与落地重心正在持续下沉,从传统的学术导向模型迭代和榜单性能验证,逐步向工业场景的规模化部署与交付倾斜。以CALVIN为代表的各类学术基准场景,其工况设置相对标准化,干扰类型单一,仅能完成模型基础能力的初步验证评估,但要适配复杂多变的工业实际作业工况,就显得远远不够。换句话说,这些学术基准无法精准衡量模型在工业落地中的真实性能与泛化水平。
工业落地实践表明,**传统学术评估体系与工业真实部署需求之间存在显著割裂**。学术基准场景简单、干扰单一,无法覆盖工业动态扰动、精密作业约束等复杂工况,难以适配落地的评估需求。团队的核心工作范式非常明确:**基于行业通用预训练基模,面向工业指定场景开展定制化后训练迭代**,聚焦迭代后的场景专属后训练模型进行性能评估与能力验证。传统的针对通用基模的学术评估方式,难以有效量化后训练模型的工业适配能力,当然也无法完全支撑工业模型的迭代优化与量产上线决策。
**(二)真机评估固有短板:成本、效率与安全的约束矛盾**
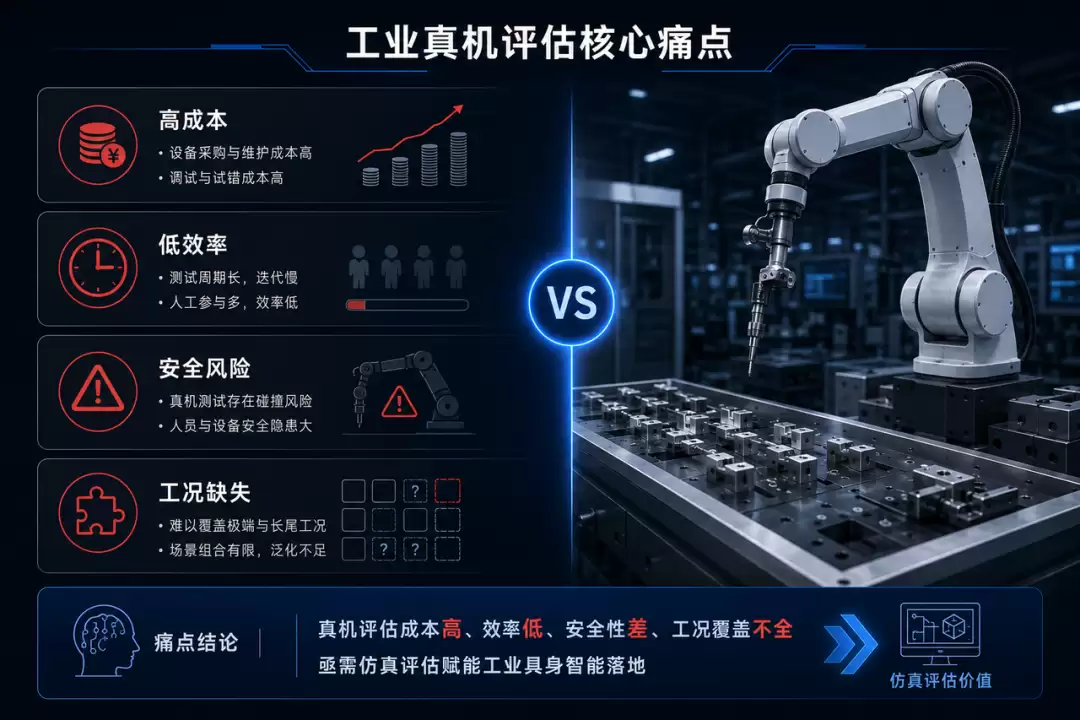
真机实测是最贴合真实工况的评估方式,但长期面临**成本高昂、效率低下、安全性差**的核心矛盾,这严重制约了模型的快速迭代。
**成本层面**:工业机械臂与精密装配部件造价不菲,真机频繁试错会导致设备磨损和物料损耗,规模化测试的成本压力巨大。
**效率层面**:真机测试需要人工进行布场、校准与重置,流程繁琐,迭代周期长,无法完成海量工况的全面覆盖验证。
**安全层面**:工业极端工况与长尾故障无法通过真机穷举试错,盲目测试容易引发设备故障与生产事故,落地风险极高。
此外,工业场景中存在大量**微小位姿偏移、弱光照、强反光、亚毫米装配公差**等长尾边缘工况,人工真机测试难以全面覆盖,导致模型的隐性缺陷无法提前发现,成为量产交付中的隐患。
**(三)可信仿真评估的核心价值:补齐工业模型迭代短板**
可信仿真评估体系的核心定位,并非要替代真机测试,而是要构建**“仿真全量校验、真机精准落地”**的协同迭代模式,承担物理世界前置缓冲与模型能力边界探测的核心作用。
依托仿真**低成本、高并发、可复现、全工况覆盖**的优势,可以对场景后训练VLA模型开展大规模领域随机化、物理参数扰动与长尾场景压力测试,快速探明模型的能力上限与失效边界。通过可微物理仿真与接触动力学建模,能够精准复现微小装配公差、摩擦/刚度变化等真实物理交互细节,弥补真机测试难以枚举的边缘工况。利用前置仿真筛选出高鲁棒性策略,可以大幅减少无效的真机试错,降低硬件损耗与生产风险,让每一次真机测试都具备明确的迭代价值,为模型后训练的迭代优化与场景部署提供前置保障。
**二**
**体系搭建:基于Isaac Lab的可信仿真评估基础设施**
仿真评估长期受**Sim2Real鸿沟**影响,存在结果虚浮、指导性弱的问题,行业普遍对其真实性存疑。为解决这个痛点,我们基于NVIDIA Isaac Lab生态搭建了工程化、可量化、可核验的可信评估基础设施。这套体系摒弃了传统仿真“仅用于横向刷榜”的浅层定位,通过**统计与工程双层可信背书**夯实评估可靠性,配合标准化环境质控、高保真解耦架构、工业适配指标体系,全方位对齐仿真与真机在物理交互和感知-动作闭环上的性能,为Physical AI模型迭代与上线决策提供坚实的工程支撑。
**(一)仿真评估可信度的统计与工程双层验证**
真机评估真实但成本高、无法规模化、缺乏统计保障;纯仿真评估高效可扩展,但存在固有的Sim2Real偏差,难以直接推导真机性能。针对这一矛盾,本研究依托前沿研究从**统计理论与工程落地双维度**验证仿真可信度,证明仿真评估可量化、可复现、可规模化,使真机测试从“全量试错”转向“精准验证”。

**1.统计层面:SureSim框架实现不完美仿真的可信性能推断**
2025年发布的**SureSim框架**,为“仿真为主、真机为辅”的评估范式提供了严格的统计学支撑。其核心思路并非追求仿真绝对完美,而是通过**“少量真机+大规模仿真”**的组合方式校正仿真系统偏差:先选取典型工况完成真机与仿真配对测试,基于配对数据标定偏差,再通过海量高通量仿真测试,结合非渐近均值估计算法,输出模型真实性能的严格置信区间。
实验验证,在工业场景仿真与真实工况相关性ρ≥0.5的条件下,该范式可以在保证评估精度的同时,降低20%-25%的硬件测试成本,有效支撑各类通用基模迭代产出的场景后训练模型评估工作。这个框架通过偏差校正与置信约束,让非完美仿真也能输出可信的评估结论,夯实了面向工业后训练模型的仿真评估范式的理论基础。[1]
**2.工程层面:SIMPLER体系实现仿真与真机效果高度对齐**
2024年开源的**SIMPLER体系**从工程角度证实了仿真评估的有效性。其核心突破是无需搭建高精度数字孪生,仅通过**控制参数辨识、视觉对齐、扰动归一化**等轻量化手段,就能大幅缩小仿真与真机的感知、控制偏差,实现性能的强关联匹配。
现有主流通用VLA基模如RT-1、RT-1-X [3]、Octo [4]等,原生性能仅适配通用场景,难以直接满足工业落地需求。但经SIMPLER体系对齐优化后的仿真环境,与真机测试结果的**Pearson相关系数可达0.85-0.98**,排名误差指标极低,可以精准校验各类基模迭代产出的后训练模型的真实能力,有效复刻模型优劣排序、预判工况鲁棒性变化,是适配工业后训练模型迭代的标准化评估方案。[2]
**3.自研环境质控机制:筑牢仿真可信底层防线**
依托统计与工程双层可信背书,我们可以搭建**自动化环境质控机制**,从**物理稳定性、工业语义合理性**两大维度过滤无效工况、修复环境失真,规避“垃圾进、垃圾出”的问题,保障仿真场景贴合工业现场,为后续高保真架构落地与精细化评估迭代筑牢基础。
**(二)基于高保真仿真引擎的分层评估架构设计**
在解决仿真可信度问题后,我们基于Isaac Lab-Arena搭建了工程化评估架构。该生态原生具备**物理高保真、渲染高保真、大规模GPU并行**三大核心能力:高精度物理引擎可以还原碰撞、摩擦、力矩反馈等复杂工业动力学特性;精细化渲染可复刻金属反光、材质纹理等真实视觉工况,有效缩小Sim2Real鸿沟;大规模GPU并行能力支撑海量环境批量推演,适配高频次模型迭代需求。基于上述能力,我们搭建了轻量化**三层解耦架构**,聚焦工业评估核心诉求,实现仿真、配置、执行的模块化解耦,提升体系的通用性与迭代效率。

**底层物理基座**:依托Isaac Lab高保真物理能力,贴合工业端侧算力与作业约束,精准复刻机械臂动力学、精密接触与碰撞逻辑,保障仿真与真机物理控制的一致性,从底层保障评估的真实性。
**组件化解耦层**:通过独立的任务、机器人、场景配置模块,深度解耦设备、任务与仿真环境。这意味着无需重复开发场景,就可以快速适配多机型、多工业任务,大幅降低适配成本、提升体系复用性。
**高通量并行执行层**:释放GPU并行算力优势,支持上万级测试用例同步推演,实现不间断的规模化评估,彻底解决传统单机仿真效率低、边缘工况覆盖不全的痛点,完美适配VLA模型的高频迭代需求。
**(三)面向后训练专属模型的工业专属评估指标体系**
为了精准量化VLA模型经过场景后训练后的真实能力增益,我们摒弃了传统针对原始基础模型的单一基准成功率评估方式,构建了**任务性能、场景约束、工程落地三维专属评估体系**。这套体系贴合工业作业特性与量产诉求,专门面向后训练模型的迭代特性设计,可以精细化量化每一轮后训练的能力迭代效果,为数据飞轮优化与模型定向迭代提供精准依据。
**1.任务性能指标:面向后训练模型的抗扰动作业能力**
本指标专门用于量化后训练模型的工业泛化与容错能力,完全区别于学术场景针对原始基础模型的无扰成功率统计。评估过程主动叠加**光照剧变、位姿偏移、设备振动、金属反光、物料错位**等工业典型扰动,统计复杂工况下的完整任务执行成功率。同时引入**错误自主恢复率**,量化后训练模型在对位偏差、轻微碰撞、路径偏移等异常场景下,无需人工干预即可自主重规划、纠错并接续任务的能力,直观体现模型后训练后的环境自适应与动态容错水平。
**2.场景约束指标:工业物理与任务合规性量化**
针对工业精密作业的强物理、强流程约束,这套指标体系用于规避“仿真最优、真机失效”的Sim2Real错位问题,保障评估的落地有效性。包含四大细分维度:**设备约束**,涵盖关节限位合规率、力矩峰值控制、运动平稳性,规避设备损伤风险;**物理约束**,包含无效碰撞率、接触力合理性、装配贴合精度、长程误差累积量,保障精密作业适配性;**任务时效**,统计作业耗时与子任务节拍稳定性,适配流水线生产节奏;**工况合规**,检测作业路径合理性与装配容错能力,过滤违规无效动作。
**3.模型工程化落地指标:量产部署可行性量化**
这个维度聚焦量产落地的刚性需求,跳出纯算法性能评估范畴,量化模型的工程适配能力。核心包含两大指标:一是**推理算力开销**,统计单次推理的显存占用、算力消耗与资源利用率,适配端侧有限算力的约束;二是**推理延迟性能**,量化单次推理与动作输出的平均、最大及波动延迟,保障机械臂高频连续作业的实时性。同时可以拓展多批次推理稳定性、低算力设备适配等衍生指标,实现从仿真迭代到量产落地的无缝衔接。
**三**
**飞轮驱动:仿真评估驱动后训练数据迭代的核心逻辑**
在VLA模型后训练工作流中,针对后训练模型的仿真评估并非单纯的打分工具,而是**驱动数据飞轮高质量迭代的核心引擎与筛选器**,形成了“评估找短板、仿真产高价值数据、数据反哺训练、迭代再优化”的闭环进化体系,持续推动后训练模型能力升级。
**(一)场景扩维:评估用例的自动化泛化更新机制**
传统评估用例是静态固化的,仅覆盖标准工况,无法适配工业场景的动态变化。本文的体系可以实现**评估用例的自动化多维扩维**,持续丰富边缘与对抗场景。
通过**程序化泛化**,自动生成光照变化、位姿偏移、接触角扰动、背景干扰等常态化扰动场景,模拟真实工业环境中的多模态感知噪声与物理交互不确定性;通过**VLM语义泛化**,构建物料错位、基准偏移、环境遮挡等工业长尾工况。这个机制将静态测试用例升级为动态对抗测试集,实现了常规工况与极端边缘场景的全面覆盖。
**(二)短板定位:高通量仿真评估的价值挖掘能力**
高通量仿真评估的核心价值不在于简单输出通过率,而是针对后训练模型批量**挖掘失效案例、精准界定模型能力边界**,系统性捕捉后训练模型在精密对位、长程规划、扰动适配、异常决策等场景的各类失效模式。
结合量化指标统计各类失效的占比、触发条件与误差规律,可以精准定位后训练模型的能力短板,区分**感知精度不足、控制稳定性欠缺、长程规划能力薄弱**等迭代问题,彻底摒弃传统基模通用评估的盲目性,为工业场景后训练模型的定向优化提供明确方向。
**(三)数据闭环:高价值轨迹回流的模型优化机制**
数据飞轮高效迭代的核心,是针对后训练模型的**仿真评估高精度数据筛选与闭环回流能力**。传统人工采集与普通合成数据质量参差不齐、无效数据占比较高,无法精准适配后训练模型的迭代优化诉求,反而会拖累模型迭代效果。
本文的仿真体系在高压扰动工况中,专门针对后训练模型的作业特性,自动筛选模型**试错、纠错、最终成功完成作业的优质轨迹数据**。这类数据包含了丰富的抗扰动策略、误差修正逻辑与边缘场景适配能力,是精准适配后训练迭代的核心数据资产。
将优质轨迹数据清洗提纯后反哺后训练,可以针对性提升后训练模型的边缘适配、自主纠错与长程稳定控制能力,形成完整的迭代闭环,让仿真评估成为后训练模型持续进化的核心驱动力。

**四**
**工程落地:工业精密零件分拣场景实践验证**
聚焦工业场景定制化模型后训练与工程落地迭代,以工业精密零件分拣场景为例,**基于通用VLA基模开展工业场景适配优化**。基于通用Groot N1.5基模开展场景定制化后训练,同时针对传统真机迭代成本高、工况覆盖不全、后训练模型缺乏专属量化评估手段的行业痛点,搭建面向工业后训练模型的可信仿真评估体系、打通全链路仿真评估流程,通过工程实战验证了仿真评估在工业后训练模型迭代、量产落地中的核心赋能价值。
**(一)任务场景介绍:工业精密零件动态分拣工况**
落地场景为工业流水线精密零件分拣任务,核心目标是完成VLA模型场景后训练优化,让后训练模型具备在复杂动态工况下,精准识别、分类、拾取各类细小精密零件的能力。相比于实验室标准化场景与基础模型评估范式,真实工业分拣环境存在大量不可控扰动,落地重点覆盖**三类核心泛化挑战:环境光照扰动、零件位置扰动、零件颜色泛化**。
具体工况难点如下:一是**光照条件动态变化**,车间强光、暗光、局部反光、阴影遮挡交替出现,容易影响模型视觉特征提取与识别精度;二是**零件位置扰动明显**,流水线来料位置、摆放角度、堆叠状态不固定,存在随机偏移、轻微堆叠、倾斜摆放等常态化工况;三是**零件颜色泛化需求**,同结构零件存在多批次喷涂色差、表面氧化、污渍附着等外观变化,要求模型具备结构优先、弱化颜色干扰的鲁棒识别能力。整体场景高度贴合工业流水线的真实不确定性,能够有效检验模型的泛化能力与仿真评估体系的真实性。
**(二)全链路工程落地与仿真评估实施流程**
精密零件分拣落地严格遵循**仿真环境构建、仿真数据采集、模型后训练、仿真评估、真机验证**的标准化工程闭环,全程围绕后训练模型的性能校验与迭代优化展开,实现从虚拟迭代到真实落地的高效打通,其中面向后训练模型的仿真评估作为全链路的核心质控与优化枢纽,承担着关键的承上启下作用。

**1.仿真环境构建**
基于Isaac Lab高保真渲染与物理能力,复刻真实分拣工作台、流水线传输状态、精密零件的物理属性与视觉特征,完整还原车间光影、零件材质、摩擦特性与运动约束,最大程度缩小分拣场景的Sim2Real鸿沟。
**2.大规模仿真数据采集**
依托环境自动化泛化能力,批量生成多光照、多位姿、多色差的分拣工况数据,以低成本、高效率构建覆盖常规场景与边缘场景的分拣数据集,为模型后训练提供充足、多样的训练素材。
**3.模型后训练迭代**
基于采集的高质量仿真数据,对Groot N1.5 VLA基模,开展工业精密零件分拣场景的定制化后训练迭代,让模型学习分拣场景专属的零件结构特征、抗干扰识别逻辑与标准化作业动作,适配工业流水线分拣作业规范。
**4.全维度仿真评估**
作为整个流程的**核心环节**。为了精准校验后训练模型的迭代质量与落地能力,从以下三个方面展开:
(1)可信评估环境搭建:完成分拣任务场景的标准化构建,批量配置光照强弱、局部反光、阴影干扰、零件位姿偏移、色差替换等多级扰动条件,同时通过物理与语义双层质控,保证所有测试工况合规、真实、有效,杜绝无效评估场景。
(2)大规模GPU并行评估:依托Isaac Lab原生GPU高通量推演能力,一次性完成上万级不同扰动工况的并行测试,快速覆盖全量常规与边缘分拣场景,高效输出模型整体性能表现。
(3)三维度指标体系量化分析:从任务性能、场景约束、工程落地三大维度完成模型能力的全量打分。重点统计扰动工况下的分拣成功率、错误自主恢复率;核验分拣过程的关节限位、力矩约束、碰撞合规性、作业节拍稳定性;量化模型分拣推理的算力开销与延迟表现,全方位判定模型迭代效果与落地可行性。
**5.真机小规模验证**
筛选仿真评估中表现优异、鲁棒性强的后训练模型权重与作业策略,部署至真实工业机械臂分拣平台,开展少量真机抽样验证,对标仿真结果、校验Sim2Real一致性,完成后训练模型的迭代闭环。
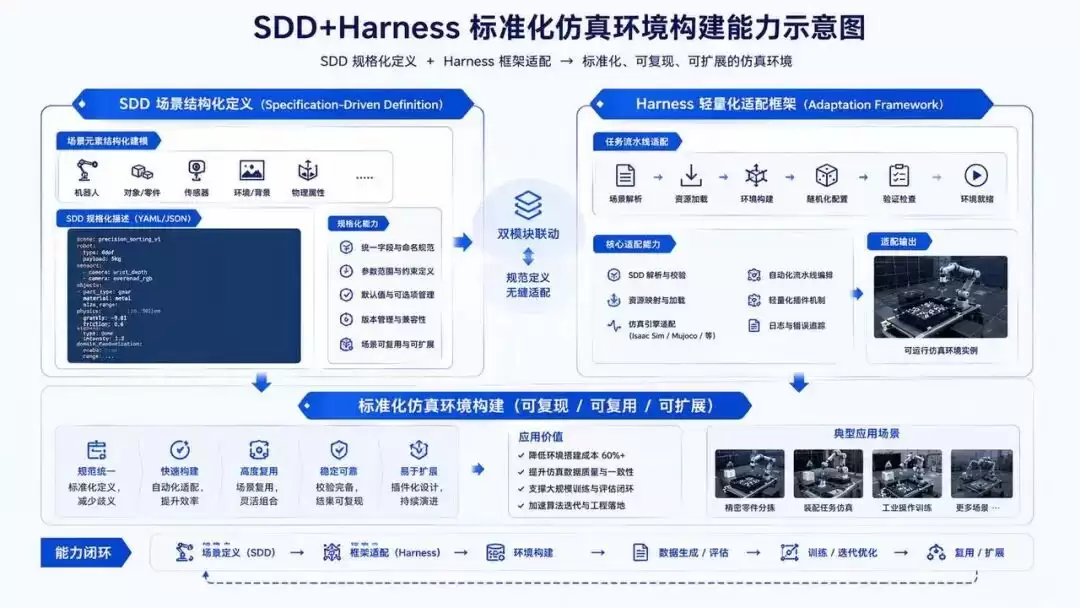
**6.基于SDD+Harness的仿真环境构建能力落地**
围绕工业分拣场景,构建“场景定义—环境构建—任务对接—仿真运行—评估反馈”的完整仿真流程,形成可复用、可复现的工程化能力。基于SDD结构化规范,对分拣场景的环境参数、物料属性、常规扰动规则及作业约束进行规范化梳理,有效改善了单场景仿真环境配置零散、定义不统一、难以复现的问题。通过Harness轻量化框架,完成仿真环境与后训练任务、评估流水线的基础对接,实现环境配置、任务绑定、测试推演的基础联动适配。
**(三)仿真评估对后训练数据迭代的实际赋能效果**
在本次工业精密零件分拣的场景落地与后训练模型迭代过程中,本研究顺势落地了仿真评估体系的**两大核心飞轮能力**,完整实现了适配后训练模型的评估用例动态扩维、模型短板精准挖掘功能,有效驱动后训练模型持续迭代优化,证明了专属仿真评估体系对工业后训练模型迭代的核心支撑价值。
一是**实现评估用例库动态扩维**,持续丰富工业分拣场景边界。依托仿真评估的自动化泛化能力,摆脱了传统固定测试场景、通用基模统一评估的局限。针对精密零件分拣的光照、位姿、颜色三大核心扰动维度,定向生成适配工业场景、贴合后训练迭代需求的多级扰动工况与长尾边缘场景,持续扩充评估用例覆盖范围,倒逼基于Groot N1.5迭代的场景后训练模型持续学习工业泛化特征,避免场景过拟合,大幅提升后训练模型的真实流水线适配能力。
二是**依托高通量评估精准挖掘模型短板**,指导定向迭代优化。针对基于Groot N1.5迭代的分拣场景后训练模型展开高通量仿真评估,聚焦后训练模型在工业工况下的真实作业表现,量化模型在各类扰动下的失效分布与错误模式。例如在分拣任务中,精准定位到后训练模型的核心短板:**强光反光场景识别漂移、大角度倾斜零件拾取失败、色差干扰下的特征混淆**等问题。基于明确的失效统计与边界定位,后训练迭代不再盲目堆量数据,而是可以定向聚焦后训练模型的薄弱场景、补充高价值的工况样本,实现能力的精准补强,大幅提升迭代效率与迭代收益。
**(四)工程落地经验与展望**
复盘工业精密零件分拣场景的落地实践,我们沉淀出以下两项核心经验。这些源自真实业务场景的共性认知,不仅验证了当前技术路线的可行性,更具备向各类工业具身智能任务迁移的普适价值:
1.仿真扰动需贴合工业真实分布,摒弃无效泛化。无规律的随机噪声扰动会导致模型学习冗余特征,造成仿真效果虚高、真机泛化退化。只有针对工业场景固有的痛点,定向配置光照变化、零件位姿偏移、外观色差等真实扰动,才能有效扩充场景覆盖度,保证仿真训练与评估的真实性,规避反向Sim2Real偏差。
**2.高通量仿真评估是工业低成本迭代的核心前提**。工业分拣场景工况繁杂、扰动维度多、边缘场景丰富,针对后训练模型的真机全量测试成本极高、周期冗长、落地风险突出。依托Isaac Lab大规模GPU并行推演能力,可以快速完成后训练模型的全工况性能摸底与短板定位,以低成本仿真迭代替代低效、高损耗的真机测试,大幅提升工业后训练模型的迭代与量产落地效率。
工业精密零件分拣场景的实践落地,证实了可信仿真评估体系在缩短迭代周期、降低落地风险和提升模型鲁棒性方面的显著价值。未来的工业具身智能,将不再局限于单一任务或单一机型,而是需要在多个工厂、多条产线、多种工艺之间快速迁移与复用。当仿真评估的通用适配性与置信度达到极致,未来Physical AI的交付模式,能否从高成本的“现场调试”进化成低门槛的“仿真即交付”?
要将上述构想转化为可落地的工程实践,必须突破单点验证的局限,构建支撑规模化应用的通用能力。需要围绕**环境构建、数据闭环、工程落地**三大方向持续攻坚:
**1.构筑标准化基座:深化SDD+Harness标准化环境构建体系**。统一全品类工业具身任务的场景定义规格、扰动配置标准、环境适配协议。打通多机型机械臂、多工业作业任务的环境快速适配链路,实现仿真环境一次规格定义、多场景复用、一键快速部署,解决传统仿真环境定制化开发成本高、复用性差、迭代慢的痛点,打造可规模化普及的仿真环境工程化构建能力。
**2.激活数据飞轮:补齐高价值轨迹数据回流闭环能力**。完善仿真数据筛选、清洗与回流机制,自动挖掘模型在边缘工况中试错、自主纠错、稳定作业的优质轨迹数据,实现“评估发现短板、数据沉淀资产、训练迭代优化”的完整数据飞轮闭环,持续驱动模型能力进化。
**3.重塑交付范式:推动仿真评估体系规模化工程落地**。将当前已验证可信的三维评估指标、质控机制、高通量评估架构、SDD+Harness标准化环境构建能力全面落地至各类工业工程化项目,形成标准化、可复用的工业模型仿真迭代流程,真正实现仿真评估赋能工业具身智能量产落地。
**(五)适用边界与当前局限**
尽管仿真评估体系已在工业精密零件分拣场景中验证了其在高通量评估、短板定位与后训练迭代中的工程价值,但仍存在明确的适用边界与阶段性局限,需要结合具体工业场景审慎使用。
**仿真评估有效性的前提是仿真环境与真实工况之间具备足够相关性**。SureSim等研究也表明,如果场景中存在难以准确建模的复杂接触行为、柔性形变或强非线性动力学特征,仿真与真实之间的偏差可能显著放大,影响评估结论的可靠性。尤其在复杂装配压配、非刚体物料处理等场景中,仅依赖当前通用物理建模能力,仍难以完全复刻真实工况。
**SDD+Harness标准化环境构建体系当前仍处于持续扩展阶段**。工业分拣场景主要覆盖刚体操作、结构化工位与典型视觉扰动场景,对于跨工艺、多阶段协同任务、复杂夹具交互、柔性物体操作等更复杂的工业场景,仍需要针对性扩展场景定义规范、扰动建模方式与任务适配接口。虽然组件化解耦架构降低了新场景的迁移成本,但在涉及高精度接触建模、特殊传感器适配或复杂工艺逻辑时,仍存在一定的环境开发与参数校准开销。
仿真评估体系的核心定位,仍然是模型迭代优化与工程验证工具,而不是直接替代工业合规认证流程。通过“仿真高覆盖前置校验 + 真机小规模精准验证”的协同迭代范式,才能最大化发挥仿真的规模化与低成本优势,降低工业具身智能模型从实验室走向真实产线的迭代门槛与部署风险。
**参考资料:**
[1] Badithela, A., et al. (2025). SureSim: Reliable and Scalable Robot Policy Evaluation with Imperfect Simulators.
[2] Li, X. , Hsu, K. , Gu, J. , Pertsch, K. , Mees, O. , & Walke, H. R. , et al. (2024). Evaluating real-world robot manipulation policies in simulation.
[3] Open X-Embodiment Collaboration. (2023). Open X-Embodiment: Robotic Learning Datasets and RT-X Models.
[4] Octo Team. (2024). Octo: An Open-Source Generalist Robot Policy.
[5] NVIDIA Corporation. (2025). Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning.