幻尔科技推出的PuppyPi自面世以来,凭借卓越的稳定性和开放的生态体系,持续吸引着众多机器人爱好者、教育从业者及开发者。其最令人瞩目的亮点,莫过于那套兼具高度仿生特性与出色稳健性的步态系统。接下来,我们将深入探讨PuppyPi如何实现这些灵动而扎实的移动动作。

一、专为动态平衡打造的身体结构
真正的稳定源于能够灵活响应的机械结构。PuppyPi的连杆式腿部设计使小腿摆动更快、幅度更大,同时大腿与小腿的运动轨迹完美错开且互不干扰——这相当于为机器狗配备了类似真实生物的高效关节,从物理层面奠定了灵活与稳健的基础。

机身采用高强度硬铝合金,兼顾轻盈与坚固。搭配金属轴承关节,整个机器狗在响应控制指令时惯性极低,能够实现快速灵敏的动作切换。即使在桌面上,它也能灵巧转身、稳健踏步,每个指令都会转化为精准而流畅的动作表现。
二、实时运算的“小脑”控制系统
优秀的硬件还需要一颗具备实时计算能力的“小脑”来驱动。PuppyPi搭载的新一代树莓派5主板,性能达到前代产品的2至5倍。这意味着机器狗可以在每秒钟内处理更多传感器数据,完成更复杂的运动学解析。当你观察它行走时,这颗“小脑”正以微秒级的速度持续调整:面对不同地形如何切换步态?遇到地面起伏如何优化姿态?所有这些计算均在瞬间完成。稳定不再是一个静态姿势,而是一种动态、智能的平衡维持能力。

三、精准调校的动作语言
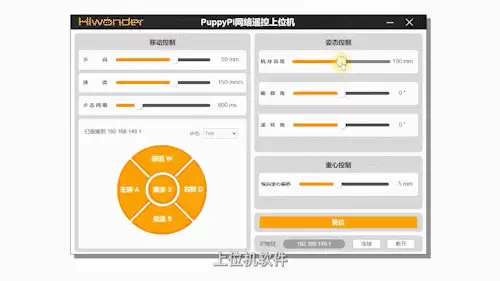
硬件稳健、内核智能,接下来的核心挑战在于如何充分释放这些潜力。PuppyPi将运动控制转化为直观的交互体验,用户可自由调节每一种“步态”,也能轻松设计出不同的“姿态”。
通过配套的上位机软件,你可以直接调整Walk(行走)、Trot(小跑)等步态的关键参数,包括触地时间、离地高度以及步态周期。每当调整一项参数,机器狗的行为表现就会实时更新。若想让它呈现特定姿态,也无需面对复杂的公式——可视化动作编辑软件将“逆运动学”设计简化为类似拖拽积木的操作:设定脚掌目标位置,系统即刻实时计算所有关节的转动角度。
从步态调试到姿态设计,贯穿了一个完整的认知闭环。这不仅帮助你掌握机器狗稳健行走的底层控制逻辑,也锻炼了将抽象理论转化为实际应用的综合能力。
四、从步态稳定迈向智能决策
PuppyPi的“稳健”使其成为可靠的移动平台。基于树莓派5强大的扩展性以及内置的ROS1/ROS2系统,它可以轻松接入激光雷达、机械臂等外设,解锁建图导航、智能抓取等复杂任务。配合高清广角摄像头与多模态AI模型,人脸识别、目标跟踪、视觉巡航乃至自主攀爬都不在话下。


这意味着PuppyPi从一个出色的步态学习平台,进化为集“感知—决策—执行”于一体的智能机器人开发平台。无论你是想验证SLAM算法,还是尝试具身智能应用,PuppyPi都能让你在真实、动态的物理环境中,将创意稳健地落地实现。
无论是刚踏入机器人领域的学生、深耕技术教育的教师,还是充满创意的开发者,PuppyPi带来的不仅是一台行走稳定的机器狗,更是一个值得信赖的探索伙伴。它让学习变得可视化,让创意触手可及,也让每一步探索都更加稳健而富有成效。